

1.2.3 Электромагнитный датчик уровня
Датчики уровня являются современными элементами автоматики и предназначены для применения в системах управления, контролирующих наполнение и поддержание уровней в резервуарах с различными жидкостями, сыпучими веществами, газом.
Датчики уровня можно разделить по назначению на: датчики уровня жидкости (датчики уровня воды) и для сыпучих веществ.
Датчики уровня воды предназначены для контроля уровня жидкостей в различных резервуарах. В зависимости от типа приложения, где используется датчик уровня жидкости, применяются контактный или бесконтактный метод измерений. При контактном измерении (датчики поплавкового типа рис.7) датчик уровня воды располагается непосредственно на стенке резервуара и переключает контакты при достижении водой уровня его размещения.
Параметры датчика [5]:
- Напряжение : 12В
- Выход : 4~20мA,
- Регулирование диапазона : 30%
- Точность : A 0.1%
- Разрешающая способность датчика - 6,35мм
- Диапазон измерения (длина стержня) - до 12м
Измерительное устройство является быстродействующим устройством и его инерционные свойства практически не сказываются на динамике системы.
Рабочий участок характеристики преобразования измерительного устройства является линейным.
Эти допущения позволяют описать измерительное устройство уравнением:
y(t)=S(x). (16)
где х, у - входная и выходная величины измерительного устройства, соответственно; S- чувствительность преобразования измерительного устройства в следующем виде [1]:
Wu=S(17)
что соответствует передаточной функции усилительного звена, чувствительность зависит от объема резервуара, в данном случае объем резервуара равен 10 литров, а длина стержня датчика - 30 см [5].
W=30/10=3

Рис.7 Датчик
1.2.4 Структурная схема и передаточная функция системы
Рассматриваемую систему автоматического управления можно представить функциональной схемой на рисунке 8, содержащей следующие функциональные элементы: Р – регулятор, ИМ – исполнительный механизм, Об – объект управления, Д – датчик. Кргом на функциональной схеме изображена функция сравнения сигналов (сравнительный элемент).

Рис.8. Функциональная схема системы.
Здесь Yз(t) – задающий параметр на сравнительный элемент (обозначен кружком), Х(t) – входной сигнал на регулятор(Р), U(t) – сигнал на исполнительный механизм(ИМ), F(t) – сигнал на объект управления(Об), θоб(t) – выходной регулируемый сигнал на датчик(Д), θд(t) – сигнал с датчика на сравнительный элемент.
На основе функциональной блок-схемы (рис.8) и описании элементов передаточными функциями, составляем структурную схему исследуемой системы представленной на рисунке 8, изменив условные обозначения звеньев на конкретные выражения их передаточных функций. По структурной схеме (рис.9) определяем передаточную функцию разомкнутой системы и передаточную функцию замкнутой системы.
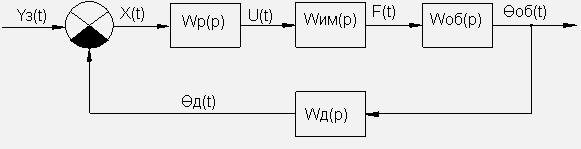
Рис.9. Структурная схема системы.
Преобразуем полученную структурную схему к замкнутой системе с единичной обратной связью с целью получения передаточной функции замкнутой системы. Для этого перенесем сравнивающий элемент с выхода датчика на вход, при этом необходимо между переносимым задающим воздействием и сравнивающим элементом добавить фиктивное звено с передаточной функцией, обратной передаточной функции исходного звена, находившегося в обратной связи (рис 9).

Рис. 10. Преобразованная структурная схема системы.
Так как фиктивное звено ставим до сравнительного элемента, то оно не оказывает влияния на динамические свойства системы, поэтому в дальнейшем при описании системы фиктивное звено можно не учитывать рис (11).

Рис. 11. Преобразованная структурная схема системы без фиктивного звена.
В соответствии с полученной структурной схемой (рис.11), а так же правилами нахождения передаточной функции соединения звеньев, передаточная функция разомкнутой системы будет иметь вид [1]:
W(p) =Wд(p)·Wр(p)·Wим(p)·WОб(p) (18)
или
W(p)
=
 ·
Wр(p),
(19)
·
Wр(p),
(19)
где:
 - коэффициент передачи датчика
- коэффициент передачи датчика
 - коэффициент передачи исполнительного
механизма.
- коэффициент передачи исполнительного
механизма.
 - коэффициент передачи объекта управления.
- коэффициент передачи объекта управления.
Wр(p) – передаточная функция регулятора.
 - постоянная времени датчика.
- постоянная времени датчика.
Подставив значения передаточных функций объекта управления, датчика и исполнительного механизма, получим передаточную функцию разомкнутой системы:
W(p)
=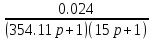
 ,
(20)
,
(20)
Значение Wр(p) принимаем равное 1, так как регулятор в системе пока отсутствует, но будет добавлен при дальнейшем исследовании [1].
Перемножим
 ,
, и
и ,
откуда получим общий коэффициент
усиления системы К =199
,
откуда получим общий коэффициент
усиления системы К =199
W(p)
=
 ,
(21)
,
(21)
Передаточная функция замкнутой системы [1]:
Ф(р) =

 .
(22)
.
(22)
По передаточной функции замкнутой системы находим характеристический полином замкнутой системы:
Ф(р)
=

 .
(23)
.
(23)
где А(р) – числитель передаточной функции замкнутой системы
G(р) – характеристический полином замкнутой системы:
G(р)= 0,05*р2+р+199. (24)