

§ 79. Автоматизация транспортных работ
Для перемещения грузов в производственных условиях применяют подвесной и напольный транспорт с индивидуальными механизмами перемещения (грузовозы и самоходные тележки) и грузо-несущие или грузоведущие конвейеры, а также грузовые лифты.
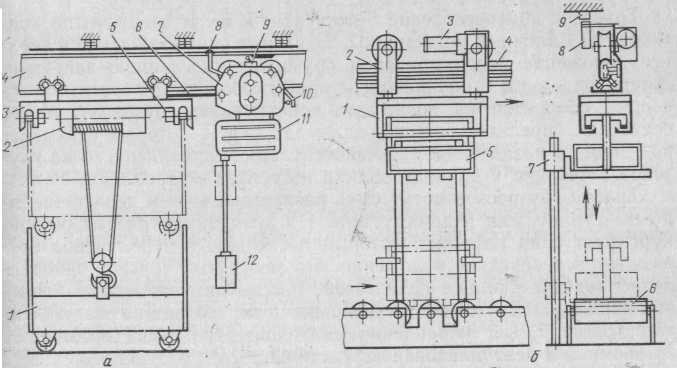
Рис. 169. Грузовозы: а — с автономным механизмом подъема груза; б — с грузовой подвеской
Электрогрузовозы. Этот вид транспорта предназначен для перемещения на расстояние 500 м и более грузов массой 0,5—5 т. На рис. 169, а изображен электрогрузовоз с автономным механизмом подъема груза. Грузовая тележка 1 электроталью 2 (или двумя талями) поднимается вверх в транспортное положение. Электроталь закреплена на ходовой тележке 3, перемещающейся по монорельсу 4. Грузовая тележка в транспортном положении фиксируется захватами 5. Тележка 3 тягой 6 соединена с тягачом 7. Электроэнергия на грузовоз передается через токосъемники с троллеев 8. Для опре-
деления места остановки (станции назначения) на тягаче смонтировано считывающее устройство 9 (блок конечных выключателей, индукционных или фотоэлектрических датчиков). Конечный выключатель 10 служит для остановки грузовоза в аварийной ситуации при наезде на препятствие (впереди идущий грузовоз или тупик монорельсового пути).
В контейнере 11 смонтирована система управления грузовозом. Задание места назначения производится с пульта 12. После подачи команды на движение пульт поднимается в транспортное положение, а при остановке на станции назначения автоматически опускается. С пульта 12 подаются команды на освобождение захватов 5 и работу электротали 2.
Существуют облегченные конструкции грузовозов (рис. 169, б), которые состоят из подвесной конструкции 1, соединенной шар-нирно с серьгой ходового 2 и приводного 3 роликов. Ролики опираются на подвес 4 специального профиля. На подвесной конструкции находится приспособление 5 — ящик, стойка или другое устройство, в котором размещены или навешены грузы. На станции отправления производится загрузка, а на станции назначения — разгрузка грузовоза.
Грузовое приспособление 5 поступает к месту загрузки по конвейеру 6. Вилочный подъемник 7 поднимает приспособление в верхнее положение перед приходом грузовоза на станцию загрузки. Затем подъемник 7 опускается и приспособление Т-образными зацепами обопрется на подвесную конструкцию грузовоза. Место остановки определяется с помощью датчика 9, который считывает код станции назначения с адресоносителя 8, закрепленного на грузовозе. Питание к приводу ролика поступает по троллеям.
Трассы грузовозов могут быть разветвленными и неразветвлен-ными: тупиковыми и замкнутыми. По тупиковым трассам обычна курсирует один грузовоз, который после каждого полурейса возвращается в исходное положение. На замкнутых трассах одновременно ходят несколько грузовозов. Рассмотрим системы управления движением грузовоза и стрелочными переводами на разветвленных трассах. Для управления движением грузовоза применяют автономные и централизованные системы.
При автономном управлении каждый грузовоз имеет свою систему задания программы и управления (рис. 170, а). С блока программы БП, располагаемого обычно на пульте грузовоза, задается адрес станции назначения, который запоминается в блоке оперативной памяти БОП. После подачи с пульта управления ПУ команды на движение грузовоза происходит сравнение в блоке ССА заданного и фактического адресов грузовоза. Информация о фактической координате грузовоза хранится в блоке памяти адресов БПА.
На основании сравнения адресов автоматически выбирают направление движения грузовоза. Сигнал с ССА подается на блок управления БУ, который коммутирует энергию, поступающую от сети через токосъемник ТС на бортовую систему управления. Вклю-_
чается исполнительный механизм ИМ, и грузовоз ГВ начинает движение.
У каждой станции находятся пикеты П1, П2, .... ПN, которые в заданном коде (утилитарном, двоичном коде Грея) подают сигнал на датчик положения ДП, находящийся на грузовозе.
С датчика сигнал поступает на блок памяти адресов БПА. При использовании импульсного ДП блока БПА является счетчиком импульсов. При движении грузовоза адреса БПА и БОП сравниваются на схеме СС, и при их совпадении поступает команда на блок управления БУ на остановку грузовоза и подается команда
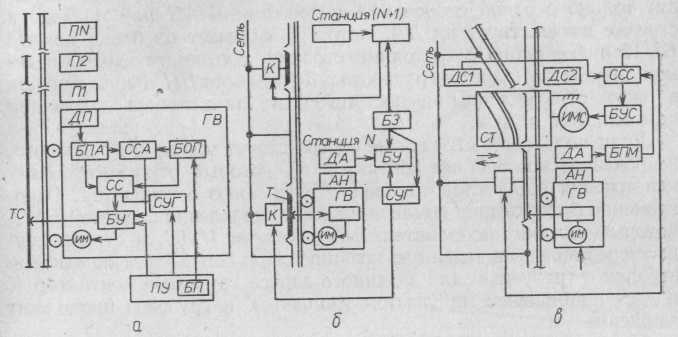
Рис. 170. Схемы управления грузовозами: а — местная; б — централизованная; в — схема управления стрелочным переводом
на систему управления СУГ подъемом (опусканием) пульта управления. Опускание груза выполняется автоматически или по команде с пульта управления ПУ.
Централизованное управление применяют при курсировании одновременно нескольких грузовозов по замкнутым маршрутам. Каждый грузовоз имеет свой маршрут и станции приема груза и разгрузки. Грузовозы ГВ имеют адресоноситель АН (рис. 170, б) который программируют заранее. На каждой станции адресоноситель воздействует на датчик адреса ДА — набор конечных выключателей, индуктивных или фотоэлектрических приборов.
С датчика ДА поступает комбинация сигналов, соответствующая коду адресоносителя. При совпадении сигнала, поступающего от ДА с кодом данной станции, находящимся в блоке задания БЗ, срабатывает блок управления БУ, отключающий контактор К. Участок троллей Т обесточивается и прекращается подача энергии к исполнительному механизму ИМ грузовоза ГВ. Одновременно с Б У подается сигнал на систему управления загрузкой (разгрузкой)
СУГ.
После реализации программы загрузки (разгрузки) блок управления БУ включит контактор К и грузовоз продолжит движение.
Задание адреса станции и программы СУГ производят централизованно. Грузовозы с одинаковыми адресоносителями будут выполнять одинаковые маршруты, делая остановки на всех станциях, в блоки управления которыми введена одинаковая информация. Управление стрелочными переводами на разветвленных трассах при централизованном управлении грузовозами автоматическое. Стрелки применяют рамные. На раме имеется два или более отрезка рельсового пути. При сдвигании рамы отрезки соединяют центральный подходящий путь с требуемым направлением. Грузовозы с централизованным управлением обычно курсируют по замкнутым трассам, поэтому к стрелочному переводу грузовозы подходят только с одной стороны. Адресоноситель АН при подходе к стрелке воздействует на ДА, который вызывает из блока памяти БПМ информацию о состоянии стрелки, соответствующем заданному маршруту (адресу) грузовоза. Информация БПМ сравнивается в блоке ССС с данными, поступающими от датчиков положения стрелки ДС1 и ДС2.
Если положение стрелки не соответствует маршруту грузовоза, то подается команда на контактор К, который отключит подачу напряжения на участок троллеи Т и грузовоз остановится. Одновременно будет подана команда на блок управления стрелкой БУС, который включит исполнительный механизм ИМС, и стрелка будет переставлена в заданную позицию. При совпадении положения стрелки с требуемым для заданного адреса грузовоза контактор К подаст напряжение на участок троллеи Т и грузовоз продолжит движение.
При курсировании грузовоза с местной системой управления по разветвленным трассам применяют центральное управление стрелками. При вводе адреса станции по специальным троллеям подается команда на перевод стрелок в требуемое положение. После перевода стрелок грузовоз начинает движение. Стрелки переводят только тогда, когда грузовоз находится на исходной станции.
Подвесные грузонесущие конвейеры применяют для транспортировки бестарных грузов и грузов в специальных контейнерах. Например, для подачи стульев к отделочным установкам, транспортировки полуфабрикатов и комплектующих к сборочным конвейерам. Тяговая цепь 1 соединяет тележки 2, движущиеся по замкнутому монорельсу 3, расположенному в горизонтальной плоскости или имеющему сложную пространственную форму (рис. 171). К тележкам крепятся подвески 4, на которых находятся контейнеры 5 с грузом, специальные грузонесущие подвески или бестарный груз. На подвесках устанавливают жесткие адресоносители — штыри 6 или кольца. Их закрепляют на горизонтальных или вертикальных штангах 7.
В месте разгрузки выдвинутый штырь (один или несколько) воздействует на конечный выключатель 8. Подается команда, и стол 9 поднимается. Через время = l/ v, где l — длина захвата тары, v — скорость конвейера, когда тара выйдет из захватов подвески, стол автоматически опускается. Тара ставится на наклон-
ный роликовый конвейер 10, по которому подается к рабочему месту Штыри выключаются электромагнитным устройством в месте загрузки. При небольшом числе адресов подвески имеют постоянные адреса. В этом случае перед загрузкой ставится устройство считывания адреса. И на подвеску помещается только груз, соответствующий ее адресу.
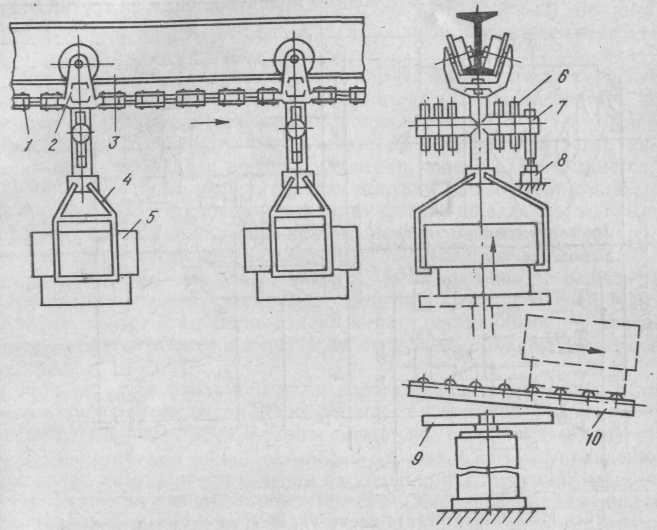
Рис. 171. Грузонесущий конвейер
Грузовые лифты служат для подъема грузов на верхние этажи зданий. Обычно лифтами управляют из кабины. Двери шахты и двери кабины не оборудуют механическими устройствами для за крывания. Замки имеют автоматическую блокировку, воспрещаю щую открытие дверей шахты при отсутствии кабины на этажной площадке. На рис. 172 показана схема управления грузовым лиф том с двухскоростным асинхронным двигателем привода механизма подъема кабины. Лифт предназначен для обслуживания четырех этажного здания.
В шахте на этажах установлены этажные переключатели SQ1— SQ4. На схеме они показаны в состоянии, когда кабина находится на первом этаже. При подходе к площадке каждого этажа кабина переводит переключатель в среднее положение (если кабина остановится на этом этаже, то этажный переключатель будет разомкнут). Если кабина продолжит движение в первоначальном положении, то переключатель займет противоположное состояние. Этаж задают
нажатием кнопки SB1—SB4. Номер кнопки соответствует задаваемому этажу. Кнопки имеют электромагнитные защелки (на схеме не показаны), удерживающие их в замкнутом состоянии до остановки кабины на заданном этаже.
В зависимости от того, в каком направлении должен двигаться лифт, включится реле КМ1 (на подъем) или КМ2 (на опускание). Пусть с первого этажа необходимо поднять кабину на третий этаж.
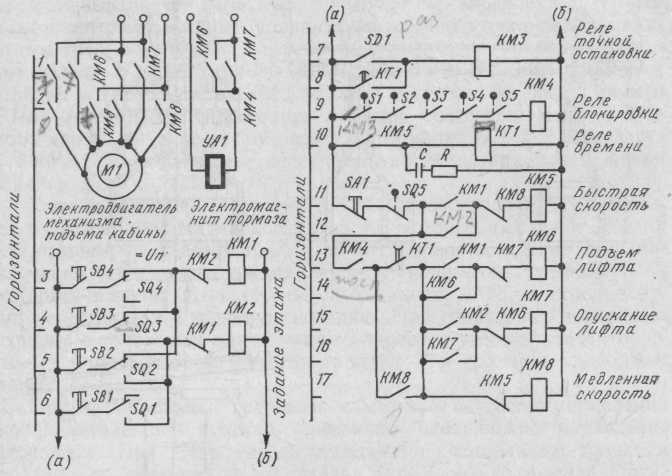
Рис. 172. Электрическая схема управления грузовым лифтом
Нажимаем кнопку SB3. Сработает реле КМ1. Так как кнопка имеет магнитную защелку, то реле будет включено после снятия воздействия на кнопку.
Контакт КМ1 (горизонталь 11) включит КМ5— контактор быстрой скорости (при опускании сработает реле КМ2 и его контакты в горизонтали 12 также включат пускатель КМ5). Другой контакт КМ1 (горизонталь 13) подготовит цепь пускателя КМ6 (при опускании КМ2 (горизонталь 15) подготовит цепь пускателя КМ7). Контакт КМ5 (горизонталь 10) включит реле времени КТ1, а в горизонтали 17 КМ5 разорвет цепь КМ 8 пускателя медленной скорости. Реле КТ1 за счет RС-цепочки сработает с некоторой выдержкой времени. Контакт КТ1 (горизонталь 8) включит реле точной остановки КМЗ, а другой контакт КТ1 (горизонталь 13) подготовит цепь КМ6 (КМ7). Реле КМЗ сработает и его контакт (горизонталь 9) включит реле КМ4, которое сработает, если закрыты все двери шахты (замкнуты SI—S4) и двери кабины (замкнут S5).
Контакт КМ4 подаст питание на обмотку пускателя КМ6 (при опускании (горизонталь 13) кабины — на КМ7). Пускатель сраба-
тывает, встает на самопитание (горизонталь 14, контакт КМ6) и включает двигатель M1. Одновременно включается электромагнит УА1 тормоза. Кабина будет подниматься. Контакт датчика точной остановки SD1 разомкнётся (горизонталь 7). При прохождении промежуточных этажей контакт SD1 будет замыкаться, но это не вызовет изменений в схеме, так как он шунтирован контактом КТ1 (горизонталь 8). Когда кабина достигнет заданного этажа (будет находиться на расстоянии 0,4—0,5 м от уровня этажа) этажный переключатель разомкнет цепь КМ1 (при задании третьего этажа— SQ3), заняв промежуточное положение).
Отключение КМ1 приведет к отключению пускателя быстрой скорости КМ5, одновременно отключится реле времени КТ1 и включится пускатель медленной скорости КМ8. Контакт КМ8 (горизонталь 17) зашунтирует контакт КТ1 (горизонталь 13), который через 0,8—0,5 с после отключения реле КТ1 разомкнётся. Одновременно будет расшунтирован контакт SD1 (горизонталь 7). На малой скорости кабина будет дотягиваться до заданного этажа. В момент совпадения уровня пола кабины и площадки этажа срабатывает датчик точной остановки — размыкается контакт SD1 (горизонталь 7). Реле КМЗ, затем КМ4 отключаются. Контакты КМ4 (горизонталь 13) разрывают цепь обмоток пускателей КМ6 (КМ7) и КМ8. Пускатели отключаются, останавливается двигатель, и тормоз (электромагнит УА1 отключен) стопорит механизм подъема.
При переходе на другой этаж работа схемы повторяется. Для вызова кабины на каждом этаже помещена кнопка вызова, которая включает в кабине лифта звонок и сигнальное устройство (блинкер), на котором выпадет номер вызываемого этажа. Система управления дополнена кнопками управления из машинного отделения, которые используют при наладке и ремонте лифта. Кнопка SA1 применяется для аварийного останова, a SQ5 служит для отключения механизма подъема в крайней верхней точке.
Кабины лифта оборудуют специальными ловителями, которые срабатывают автоматически (заклинивают кабину в направляющих), -если скорость кабины превысит эксплуатационное значение. В лифтах имеются и другие страховочные устройства, обеспечивающие безопасность эксплуатации.