

§ 9. Воспринимающие элементы давления
Давление вызывают движущиеся молекулы газа или жидкости. Давление — число единиц силы, действующей на единицу площади.
В системе СИ за единицу давления, называемую «Паскаль» (Па), принято давление, которое оказывает сила в 1 Н, действующая на поверхность в 1 м2.
В технике часто применяют «внесистемные» единицы, такие, как техническая атмосфера (кгс/см2), миллиметры ртутного столба, определяемые при температуре в градусах Цельсия и нормальном ускорении и др.
При измерении различают абсолютное, избыточное давление и вакуум. Абсолютное давление (Ра) отсч.итывается от абсолютного нуля (абсолютное разрежение), избыточное (Ри) — от атмосферного давления (Рат). Вакуум измеряют аналогично.
![]()
Устройства, предназначенные для измерения давления, можно разделить на две группы.
Устройства с упругими воспринимающими элементами1
(рис. 18, а—г). Измерение давления производится упругими воспринимающими элементами (рис. 18), к которым относят: мембраны (см. рис. 18, а), сильфоны (см. рис. 18, б), трубчатые или геликоидальные пружины (см. рис. 18, в, г).
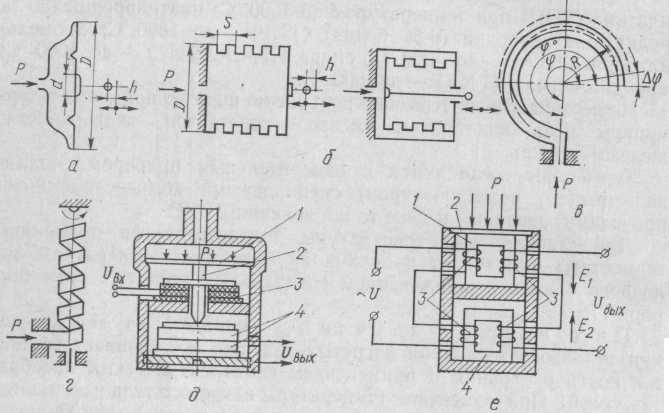
Нис. 18. Воспринимающие элементы давления:
а — мембраны; б — сильфоны; в — трубчатые пружины; г — геликоидальные пружины;
д — пьезодатчик; е — магнитно-стрикционный датчик
Перемещение центра мембраны или свободного сильфона, а также угол раскручивания свободного конца трубчатой пружины зависят от изменения давления АР, что можно выразить уравнением h = КU Р, где КU — коэффициент усиления мембраны или сильфона или трубчатой пружины.
Деформация упругих элементов преобразуется в измерительный сигнал с помощью преобразователя (емкостного, тензометриче-ского, индуктивного, реостатного и др.).
Устройства с воспринимающими элементами, изменяющими физические свойства под действием давления (рис. 18, д, е). К ним относят устройства, преобразователи которых имеют принцип действия: пьезоэлектрический, магнитно-стрикционный, ионизационный и др.
В данной группе устройств давление может непосредственно воздействовать на воспринимающий элемент, изменяя его свойства. Большинство устройств имеют мембраны, опирающиеся на чувствительный элемент (см. рис. 18, д). Давление от мембраны 1 передается с помощью стержня 2 на два измерительных пьезоэлемента 4.
Одновременно стержень 2 опирается на модулирующий пьезоэле-мент 3. Электроды пьезоэлемента подсоединены к сети переменного тока 220 В при частоте 50 Гц. Выход устройства подсоединяется к прибору. При действии переменного напряжения пьезоэлемент 3 подвергается деформации растяжения и сжатия, под действием усилия, оказываемого мембраной / на измерительные пьезоэле-менты 4.
На рис. 18, е представлена схема компенсационного устройства с магнитно-стрикционным преобразователем. Сердечник 1 является чувствительным элементом, выполненным из никель-цинкового феррита. Мембрана 2 передает давление сердечнику, у которого меняется магнитная проницаемость, а следовательно, и ЭДС Е1. Сердечник 4 и обмотки 3 создают компенсационную ЭДС Е2- Схема включения дифференциальная. Напряжение Uвых = f (E2—E1, но Е2—Е1 = f ( Р), тогда Uвых = f ( Р).