

§ 5. Датчики усилий
Датчики усилий и давлений (рис. 14) формируют управляющие сигналы в зависимости от сил, создаваемых в рабочих органах. Характерным электромеханическим датчиком можно считать кулачковую муфту 1 со скошенными зубьями (см. рис. 14,а). Одна из полумуфт размещается на валу со скользящей шпонкой
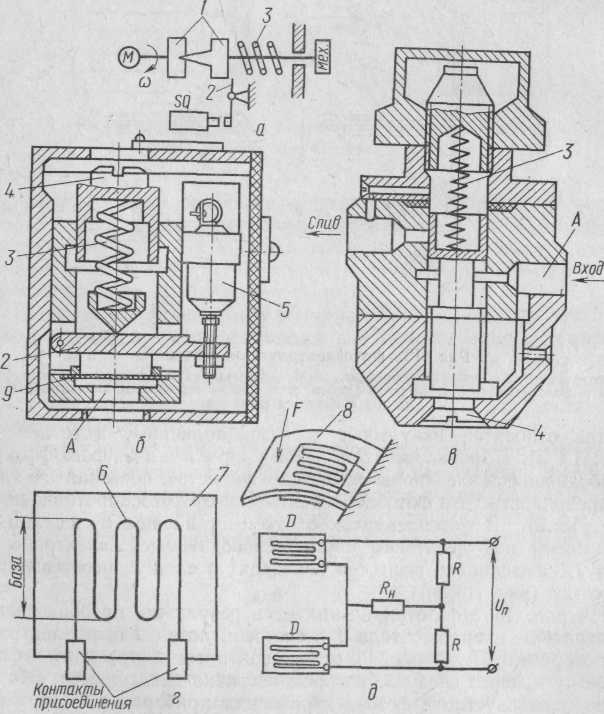
Рис. 14. Датчики усилий:
а — электромеханический; б — реле давления; в — сливной клапан; г — тензометриче-ский преобразователь; д — схема наклейки и включения тензометрического преобразо-
вателя
и прижимается ко второй половине пружиной 3. Если на валу возникают силы, превышающие предельные, муфта сдвигается и че-pез рычаг 2 воздействует на конечный выключатель SQ, вызывая eго срабатывание. Сигнал поступает в схему управления.
Реле давления (см. рис. 14, б) контролирует изменение нагрузки в рабочих органах станка по изменению давления непосредственно в гидросистеме. Выполняется с электроконтактным выходом или в виде сливного клапана (см. рис. 14, в). Повышение давления в полости А вызывает прогиб мембраны 9, рычаг 2, сжимая пружину 3, поворачивается и нажимает на шток конечного выключателя 5, вызывая его срабатывание. Регулировка силы срабатывания выполняется винтом 4.
Тензометрические преобразователи представляют собой безынерционные устройства, которые используют для преобразования малых деформаций (порядка сотых и тысячных долей миллиметра) в электрический сигнал. Тензопреобразо-ватель изготавливают из константановой проволоки диаметром 0,02—0,05 мм. Проволоку 6 приклеивают змейкой на полоску тонкой бумаги 7 и сверху наклеивают второй слой бумаги (см. рис. 14, г). Тензоэлемент приклеивают к поверхности деформируемой детали 8 таким образом, чтобы прямолинейные участки проволоки растягивались или сжимались в соответствии с деформацией элемента (см. схему на рис. 14, д).
§ 6. Датчики частоты вращения
Тахогенераторы как датчики позволяют сформировать управляющие сигналы в функции скорости. Они применяются для измерения частоты вращения и относятся к группе электрических
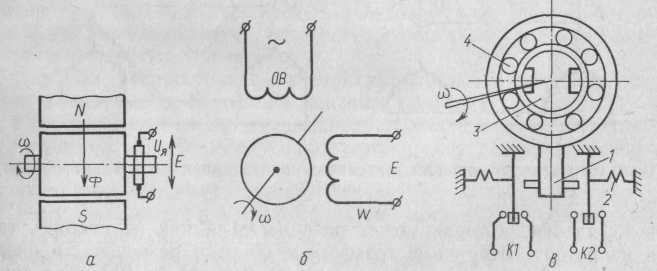
Рис. 15. Датчики частоты вращения:
а — тахогенератор постоянного тока; б — тахогенератор переменного тока; в — реле
контроля скорости
генераторов.
Тахогенераторы постоянного тока могут
иметь обмотки возбуждения или
постоянные магниты (рис. 15, а).
При
вращении
напряжение на зажимах якоря пропорционально
частоте вращения
вала якоря Е
= UЯКеФ![]() Учитывая,
что магнитный
Учитывая,
что магнитный
поток Ф=const, можно записать UTГ = UЯ = ФКе . Обозна чим КеФ= КTГ. Тогда UTГ = КTГ .
Тахогенераторы переменного тока изготавливают синхронными и асинхронными. Наиболее широкое применение получили асинхронные тахогенераторы (рис. 15, б). Они имеют обмотку возбуждения ОВ и выходную обмотку W. ЭДС тахогенератора пропорциональна частоте вращения Е = KUb .
Реле контроля скорости (рис. 15, в) состоит из постоянного магнита 3, находящегося на валу. Кольцо с коротко-замкнутой обмоткой 4 расположено на другом валу, связанном с толкателем 1, который воздействует на контактные группы К1, К2. Вал с толкателем и короткозамкнутой обмоткой возвращается в исходное положение под действием пружины 2. При вращении вала с магнитом в короткозамкнутой обмотке наводится ЭДС ЕКЗ и протекает ток IКЗ, взаимодействующий с магнитным полем магнита. Создается вращающий момент, под действием которого кольцо с толкателем поворачивается, толкатель воздействует на контакты К1 и К2, вызывая их срабатывание.