

§ 52. Системы автоматической стабилизации частоты вращения исполнительных двигателей
Системы стабилизации применяют при больших диапазонах регулирования скорости приводов, а также для приводов технологического оборудования, требующего при сравнительно небольшом диапазоне регулирования точного поддержания скорости, мощности резания и других параметров рабочего процесса. Эти системы, как правило, замкнутые. Точность систем определяется перепадом скоростей при изменении момента сопротивления и других возмущений в заданных пределах, т. е. жесткостью или статизмом механических характеристик.
В зависимости от требований к точности стабилизации режима обработки деталей и диапазона регулирования D= max/ min применяют различные варианты обратных связей.
Учитывая, что при определенных допущениях любая система автоматического регулирования может быть представлена эквивалентной системой с двигателем постоянного тока, рассмотрим только варианты электроприводов постоянного тока.
В замкнутой системе статизм s3 характеристик или перепад скорости будет наибольшим при низких скоростях:
![]()
Увеличить диапазон регулирования при заданном статизме s3 можно, уменьшая перепад скорости с. 3.
Схема стабилизации напряжения питания (частоты вращения) двигателя (рис. 106, а) содержит преобразователь П с усилителем, датчик напряжения ДН, сигнал которого Uo.с. н поступает на узел сравнения, где электрически суммируется с задающим сигналом Uз. Сигналы могут суммироваться электромагнитно, если требуется гальваническая развязка соответствующих цепей. Допускаем линейную зависимость «вход-выход» преобразователя.
Уравнения электрического равновесия запишутся:
![]()
ское сложение сигналов. Уравнения равновесия записываются:
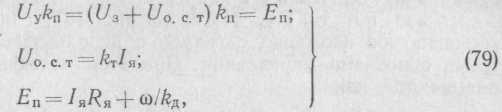
где kт = Uо. с т/Iя — коэффициент обратной связи по току; Rя = =Rп + Rя.д + Rд.т; Rд.т —сопротивление датчика тока, если он включен непосредственно в цепь якоря двигателя.
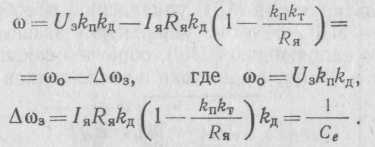
Статическую скоростную характеристику получим, решив уравнения (79):
где Uy — напряжение управления на входе усилителя, kn = — Eп/Uy. п — коэффициент усилия преобразователя, Uy п = Uy; kн = Uo.с. н/Uя — коэффициент обратной связи по напряжению; Еп — ЭДС преобразователя; Rn — сопротивление силовой цепи преобразователя. Из (78) находим:
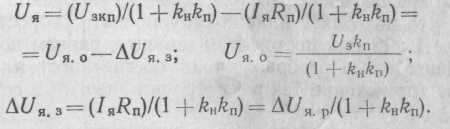
Падение напряжения Uя.3 при одинаковой нагрузке в (1 + kнkn) раз меньше по сравнению с падением напряжения Uя р в разомкнутой системе. Следовательно, жесткость характеристики преобразователя повышается, и тем самым обеспечивается стабильность напряжения Uя и частоты вращения двигателя.
Заданный статизм характеристики зависит от kн, kn и определяется по формуле
![]()
![]()
Требуемый коэффициент усиления
![]()
Статизм характеристики при изменении диапазона регулирования можно определить уравнением
Статические характеристики системы П—Д постоянного тока.
Рассмотрим случай с положительной обратной связью по току. На рис. 106, б рассматривается электриче-
В зависимости от kT теоретически можно получить любую жесткость статической характеристики.
Положительная обратная связь по току зависит от скорости со. Ее используют как дополнительную к обратной связи по напряжению или по скорости.
Для случая сотрицательной обратной связью по частоте вращения двигателя. В качестве датчика скорости (рис. 106, в) может быть использован тахогенератор или тахометрический мост. При Ф = Фн = const исходные уравнения записываются:
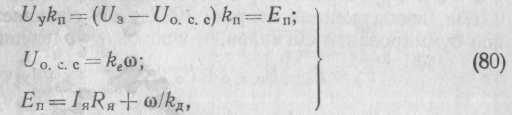
где ke = Uo.c.с/ — коэффициент обратной связи по скорости.
Из уравнений (80) получим уравнение скоростной характеристики
![]()
Из полученного уравнения видно, что жесткость статической характеристики повышается по сравнению с характеристикой разомкнутой системы в (1 + keknkд) раз.
При заданном диапазоне регулирования скорости и статизме s = з/ о min требуемый коэффициент усиления
kT = (Dsp/s3)— 1.
Тогда требуемый коэффициент обратной связи по скорости
kc= kT/knkд
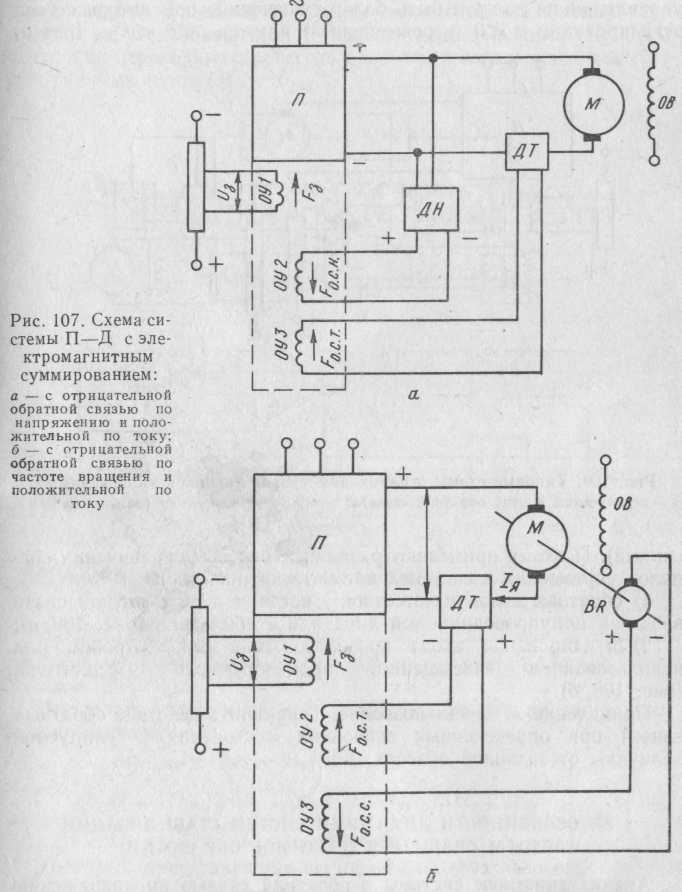
Рассмотрим случай с отрицательной обратной связью по напряжению и положительной связью по току. На схеме рис. 107, а представлено электромагнитное сложение сигналов с использованием усилителя с тремя обмотками управления. При этом исходные уравнения записываются как
где Fy — результирующая МДС управления преобразователя; F3, Fo.c.h, Fo.c.t — МДС обмоток управления задающей (ОУ1), обратной связи по напряжению (ОУ2), обратной связи по току (ОУ3); Iу1, Iу2, Iу3 и У1, у2, у3 — токи и число витков обмоток управления;
![]()
Из решения системы уравнений (81) определится статическая скоростная характеристика привода
![]()
При соответствующем выборе коэффициентов обратных связей можно получить жесткость статической характеристики, аналогичную жесткости характеристики системы с обратной связью по скорости.
Для случая с отрицательной обратной связью по скорости и положительной — по току. Схема, изображенная на рис. 107, б, обеспечивает электромагнитное суммирование сигналов, и исходные уравнения запишутся:
где kc = Fo.c.c/ — коэффициент обратной связи по скорости.
Решив систему уравнений (82), получим уравнение скоростной характеристики
![]()
Данная схема применяется при больших диапазонах регулирования D, когда стабильность скорости невозможно обеспечить одной обратной связью по скорости.
Рассмотренные варианты являются основными и не охватывают более сложных решений при построении систем стабилизации скорости резания или режимов обработки, знание методов расчета
систем стабилизации скорости позволяет решать и другие задачи по стабилизации технологических параметров. Используя уравнения данного параграфа, можно определить параметры элементов и выбрать их по техническим характеристикам.
Ограничение уровней сигналов управления в системах автоматики. Общий коэффициент усиления k системы выбирают так, чтобы обеспечить необходимый статизм характеристик для выполнения требований технологического процесса. При этом в переход-
ных процессах при пуске и резких колебаниях возмущающих воздействий возможно положение, при котором результирующий сигнал управления кратковременно превосходит установившееся значение в (1 + k) раз, что недопустимо для преобразователей. Например, для тиристорных преобразователей результирующий сигнал управления не должен быть больше значений, при которых угол регулирования <0 (нереверсивный) или min< < max (ревер-
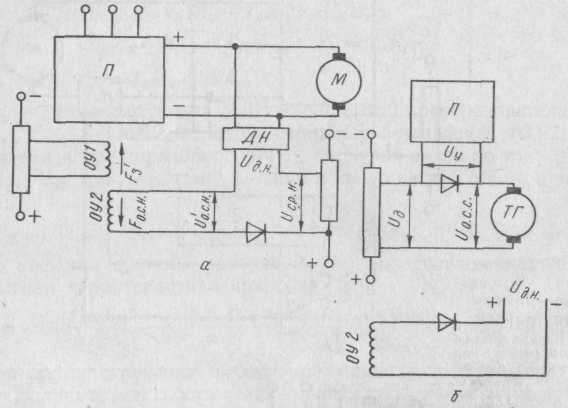
Рис. 108. Типовые схемы ограничения уровня сигналов управления: а — ограничения в цепи обратной связи; б — шунтирование входа преобразователя
сивный). Поэтому применяют различные способы ограничения сигналов управления в системах автоматики (рис. 108):
обратные связи с «отсечкой», когда в цепь обратной связи вводится полупроводниковый диод или стабилитрон (рис. 108, а);
шунтирование входа преобразователя стабилитроном или использованием «насыщения» промежуточного усилителя, (рис. 108, б).
Применение «отсечек» позволяет ограничить действие обратных связей при определенных значениях отклонения регулируемой величины от заданной области.