

§ 33. Классификация звеньев по динамическим свойствам
При решении задач анализа и синтеза автоматическую систему разбивают на отдельные части, математическая зависимость между входными и выходными величинами которых и временем описы вается дифференциальными уравнениями не выше второго порядка. Такие искусственно выделенные части автоматической системы на зывают элементарными динамическими звеньями. В отличие от элемента динамическое звено необя зательно является конструктивной или схемнозаконченной частью системы. Одному элементу (например, исполнительному механизму) могут соответствовать несколько динамических звеньев.
При представлении элементов системы в виде элементарных динамических звеньев не важен принцип построения элемента. Элементы различной физической природы могут быть представлены в виде одинаковых динамических звеньев, если их динамические свойства описываются одинаковыми дифференциальными уравнениями. Поэтому при решении задач анализа и синтеза автоматических систем многообразие элементов автоматики сводится к нескольким типовым элементарным динамическим звеньям.
Существуют 6 типовых элементарных динамических звеньев: усилительное, апериодическое, колебательное, интегрирующее, дифференцирующее и чистого запаздывания.
Усилительное звено. Это простейшее звено, которое образуется в случае передачи входного сигнала на выход без каких-либо замедлений или ускорений во времени, т. е. переходные процессы в звене отсутствуют. Примеры усилительных звеньев приведены на рис. 60, а—в.
Свойства этого элемента описываются уравнением у = Кх, где К — коэффициент усиления звена.

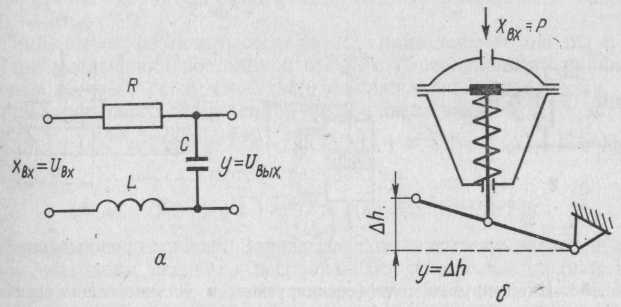
Рис. 60. Усилительные и апериодические звенья:
а — рычажная передача; б — зубчатая пара; в — усилитель; г — пассивный четырехполюсник; д — термопара; е — магнитный усилитель; ж — электродвигатель
Передаточная функция звена представляет собой постоянную величину W (р) = К.
Амплитудно-фазовая характеристика усилительного звена также равна постоянной величине W (j ) = К, при этом амплитудно-частотная характеристика А ( ) = К, а фазочастотная характеристика ( ) = 0. Графически АФХ изображается в виде точки на вещественной оси комплексной плоскости на расстоянии К от начала координат.
Апериодическое звено. Звено называется апериодическим, если его входная и выходная величины связаны между собой дифференциальным уравнением
T(dy)/dt + y = Kx.
Примеры апериодических звеньев приведены на рис. 60, г—ж. В операторной форме это уравнение может быть записано как
(Tp+1)Y(p) = KX(p),
тогда передаточная функция звена имеет вид
W(p) = K/(Tp+1).
Если на вход звена Подать ступенчатое воздействие, то временная характеристика будет иметь вид
![]()
Заменив р на j , получим АФХ апериодического звена
При
Т1
= 2Т2
получают
вещественные и равные корни уравнения
![]() а
временная характеристика записывается
выражением
а
временная характеристика записывается
выражением
![]()
АЧХ апериодического
звена имеет вид
а ФЧХ этого звена

![]()
![]()
которое в операторном виде записывается как
Передаточная![]() функция
колебательного звена имеет вид
функция
колебательного звена имеет вид
![]()
где К — коэффициент усиления звена; Т1иТ2 — постоянные времени звена; при Т2 = 0 звена превращается в апериодическое.
Примеры некоторых колебательных звеньев приведены на рис. 61.
В
зависимости от соотношения между
постоянными времени Т1
и
Т2
корни
характеристического уравнения![]() будут
вещественными, мнимыми или
комплексно-сопряженными. В
соответствии с этим и временная
характеристика звена будет иметь
апериодический или колебательный
характер.
будут
вещественными, мнимыми или
комплексно-сопряженными. В
соответствии с этим и временная
характеристика звена будет иметь
апериодический или колебательный
характер.
При Т1>2Т2 получают вещественные и разные корни р1 = 1 и р2 = 2 характеристического уравнения, тогда временная характеристика звена имеет вид
![]()
При Т1 2Т2 переходные процессы в звене протекают апериодически и такое звено не является колебательным. Оно может быть представлено в виде последовательного соединения двух апериодических звеньев.
При T1<2Т2 корни уравнения будут комплексными p1,2 =
=
±j
,
где![]()
![]()
Временная характеристика такого звена
Рис. 61. Колебательные звенья:
а — пассивный четырехполюсник; б — мембранный исполнительный механизм
При Т1 = 0 в колебательном звене возникают незатухающие колебания. АФХ колебательного звена имеет вид
Амплитудно-частотная и фазочастотная характеристики колебательного звена:
![]()
Интегрирующее звено. Звено называется интегрирующим, если выходная величина пропорциональна интегралу от входной величины.
Дифференциальное уравнение интегрирующего звена имеет вид
T(dy)/(dt) = Kx.
где = K/T — скорость разгона.
![]()
Интегрируя это уравнение, получим
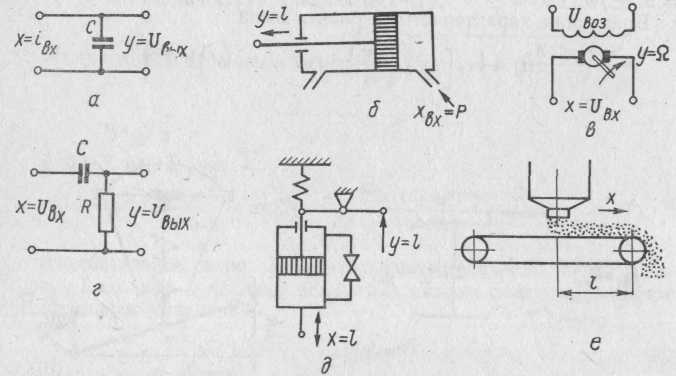
Рис. 62. Интегрирующие, дифференцирующие и запаздывающие звенья:
а— пассивный четырехполюсник; б — гидравлический исполнительный механизм; в—электродвигатель; г - пассивный четырехполюсник; д - спокоитель с пружиной в механических цепях; е — ленточный конвейер
Примеры некоторых интегрирующих звеньев приведены на рис. 62, а—в.
Передаточная функция такого звена: W (р) = /р.
Временная характеристика интегрирующего звена у (t) = xot имеет вид прямой линии, наклоненной к оси абсцисс под углом а = arctg x0. АФХ звена
![]()
представляет собой прямую, совпадающую с отрицательной мнимой осью характеристики. Амплитуда выходных колебаний звена А ( ) = / убывает с частотой, а фаза = — /2. Таким образом, интегрирующее звено при всех частотах создает отставание выходных колебаний от входных на 90°.
Дифференцирующее звено. Динамическая характеристика этого звена описывается дифференциальным уравнением вида у =
= К (dx)/(dt), и передаточная функция этого звена равна
W (р) = Кр.
Дифференцирующее звено представляет собой устройство, которое на выходе дает величину, производную по времени от входной величины. Однако на практике осуществить такое идеальное дифференцирующее звено невозможно, так как все физические процессы в природе в той или иной степени инерционны, а в соответствии с уравнением этого звена скачкообразное изменение входной величины должно вызвать мгновенное изменение выходной величины от 0 до и немедленный спад ее до 0. В системах регулирования применяют звенья, которые выполняют дифференцирующее действие приближенно; они называются реальными дифференцирующими звеньями. Уравнение такого звена имеет вид
T(dy)/(dt) + y = KT(dx)/(dt),
а передаточная функция такого звена W (р) = (КТр)/(Тр + 1).
Временная характеристика реального дифференцирующего звена у (t) = Кхое—(t/T).
Примеры дифференцирующих звеньев приведены на рис. 62, г, д.
При уменьшении постоянной времени Т реальное дифференцирующее звено по своим свойствам приближается к идеальному.
АФХ реального дифференцирующего звена имеет вид
![]()
а АЧХ и ФЧХ определяются уравнениями:
![]()
Запаздывающее
звено. Запаздывающим
называют звено, в
котором
выходная величина воспроизводит
изменение входной величины
без искажений, но с некоторым постоянным
запаздыванием
![]() :
y(t)
= x
(t—
).
:
y(t)
= x
(t—
).
Передаточная функция запаздывающего звена: W(p) = e—p/ .
Примером запаздывающего звена может служить ленточный конвейер (рис. 62, е), который загружают с одного конца материалом, поступающим из бункера.
АФХ такого звена
W(j )=e—j
Графически ее представляют в виде окружности единичного радиуса А ( ) = 1 с центром в начале координат.