

§ 3. Принципы схемного отображения технологических объектов, процессов и систем управления
Современные схемы автоматизации технологических процессов включают взаимосвязанные мнемоническую схему технологического потока, функциональную схему контроля и регулирования, принципиальную схему управления, схемы защиты и блокировки. Технологи и инженеры должны уметь читать эти схемы и при необходимости вносить изменения в существующие проекты.
Мнемонические схемы отражают расположение оборудования в технологической цепи и линии, показывающие направления материального потока и их связи. Функциональные схемы систем автоматизации являются техническим документом, разъясняющим процессы, протекающие в системе. На них показывают, как осуществлена автоматизация технологических процессов, агрегатов и аппаратов. На технологической мнемонической схеме с помощью условных обозначений показывают приемные и измерительные устройства, регуляторы, исполнительные механизмы и регулирующие органы. Взаимосвязь элементов схемы обозначают соединительными линиями (ОСТ 36-27—77 «Приборы и средства автоматизации. Обозначения условные в схемах автоматизации технологических процессов».)
Для всех первичных измерительных преобразователей и приборов, устанавливаемых по месту, принято графическое условное
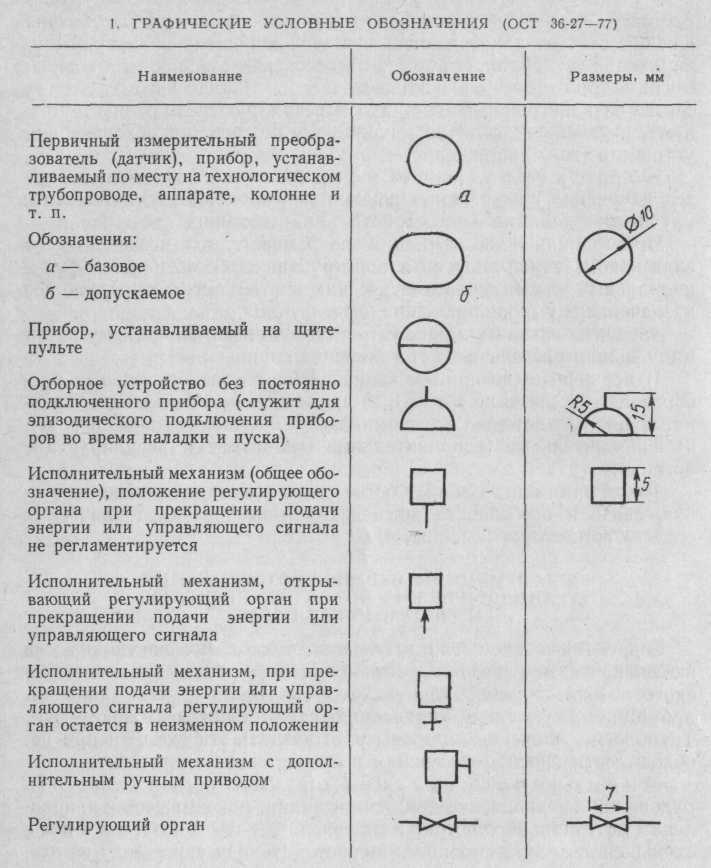
Для обозначения линий связи применяют сплошные линии. В месте соединения пересекающихся линий связи ставят точку. Линии связи можно подводить к символу прибора в любой точке окружности под любым углом.
Щиты и пульты изображают условно прямоугольниками произвольных размеров, достаточных для нанесения внутри прямо-
угольника графических условных обозначений технических средств. Машины централизованного контроля, управляющие ЭВМ, обозначают прямоугольниками произвольных размеров.
Буквенные условные обозначения выполняют буквами латинского алфавита. В верхней части окружности наносят буквенные обозначения измеряемой величины и функционального признака прибора. Принята следующая последовательность буквенных обозначений.
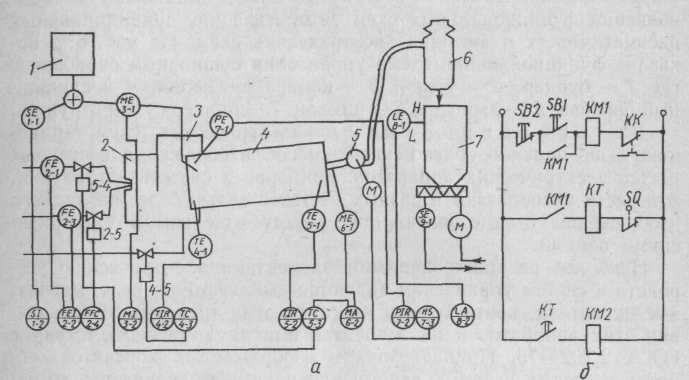
Рис. 6. Схемы отображения объекта и системы управления: функциональная контроля и регулирования (а), принципиальная (б)
Сначала пишут обозначение измеряемой величины: D — плотность; Е — любая электрическая величина; F — расход; G — размер, положение, перемещение; H — ручное воздействие; Р — давление, разрежение; Q — величина, характеризующая качество, состав, концентрацию; R — радиоактивность; S — скорость, частота; Т — температура; U — несколько разнородных величин; V — вязкость; W — масса; М — влажность.
Затем — обозначение, уточняющее (если это необходимо) ос новную измеряемую величину: D — разность, перепад; F — со отношение, доля, дробь; Q — интегрирование, суммирование во времени (допускается применение строчных букв d, f, q соответст венно).а
Далее располагают обозначения функционального признака приборов: А — сигнализация; С — регулирование, управление; I — показание; R — регистрация; S — включение, отключение, переключение. Предельные значения измеряемых величин характеризуют добавлением буквы Н (верхнее предельное значение) или L (нижнее предельное значение). Эти буквы наносят справа от окружности соответственно вверху (H) и внизу (L) (рис. 6, а). Бук-
венные обозначения функциональных признаков располагают в следующем порядке: IRCSA.
В нижней части окружности наносят цифровое или буквенное обозначение для нумерации позиции элементов комплекта измерения или регулирования по заказной спецификации проекта.
Стандарт устанавливает упрощенный и развернутый способы построения условных графических обозначений. Упрощенный способ применяют преимущественно для изображения приборов на технологических схемах. Развернутый способ применяют для выполнения функциональных схем автоматизации, принципиальных пневматических и внешних электрических схем. На рис. 6, а показана функциональная схема управления сушильным барабаном, где 1 — бункер, 2— топка, 3 — камера смешения, 4 — сушильный барабан, 5 —дымосос, 6 — циклон, 7 —бункер сухой стружки.
Для принципиальных электрических схем применяют, как правило, разнесенный способ изображения составных частей электрических аппаратов, приборов и средств автоматики. Эти части располагают в разных местах с целью более наглядного изображения взаимозависимостей между отдельными электрическими цепями.
Наиболее распространенными элементами электрических устройств и систем управления являются выключатели, реле, магнитные пускатели, контакторы и контакты этих элементов. Обозначения этих аппаратов и их элементов выполняют в соответствии с ГОСТ 2.702—75. Принадлежность изображаемых контактов, обмоток и других частей к одному аппарату устанавливается по позиционным обозначениям, расположенным рядом с изображениями всех его частей.
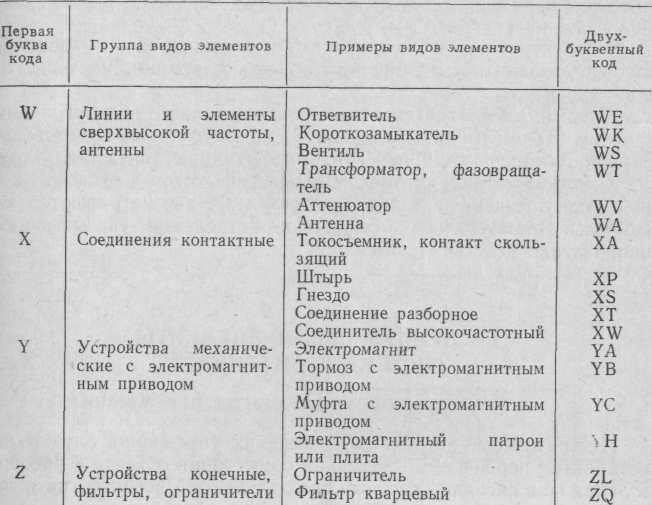
Согласно ГОСТ 2.710—81 все приборы и аппараты должны иметь буквенные и буквенно-цифровые позиционные обозначения, состоящие в общем случае из трех частей, имеющих самостоятельное смысловое значение и записываемых без разделительных знаков и пробелов. Одно- и двухбуквенные коды для обозначения вида элементов приведены в табл. 2.
Рекомендуется применять двухбуквенные коды. В первой части с помощью одной или двух букв указывают вид элемента, например R — резистор, С — конденсатор и т. д.
Во второй части обозначения указывается порядковый номер элемента в пределах элементов данного вида, который содержит одну или несколько цифр (R1, R2, C1, C2, НL1, HL2 и т. д.). При разнесенном способе изображения к порядковому номеру можно добавить условный номер изображенной части элемента, разделяя порядковый и условный номера, например: контакт K1.5 — пятый контакт реле К1. Обычно при разнесенном способе выполнения однотипным элементам не присваивают позиционных обозначений. В третьей части позиционного кодированного обозначения можно указывать функциональное назначение элемента, используя одну или несколько букв. Применяют следующие буквы: В — направление движения; С — считывающий; F — защитный; N — сиг-
2. БУКВЕННЫЕ КОДЫ НАИБОЛЕЕ РАСПРОСТРАНЕННЫХ ЭЛЕМЕНТОВ
Первая |
|
|
Двух- |
буква |
Группа видов элементов |
Примеры видов элементов |
буквенный |
кода |
|
|
код |
А |
Устройство (общее обозначение)
Преобразователи не- |
|
|
В |
Громкоговоритель |
ВА |
|
|
электрических величин |
Магнитострикционный элемент |
ВВ |
|
в электрические (кроме |
Детектор ионизирующих из- |
BD |
|
генераторов и источни- |
лучений |
|
|
ков питания) или наобо- |
|
|
|
рот; аналоговые, много- |
Сельсин-приемник |
BE |
|
разрядные преобразо- |
Телефон (капсюль) |
BF |
|
ватели или датчики для |
Сельсин-датчик |
ВС |
|
указания (измерения) |
Тепловой датчик |
ВК |
|
|
Фотоэлемент |
BL |
|
|
Микрофон |
ВМ |
|
|
Датчик давления |
ВР |
|
|
Пьезоэлемент |
BQ |
|
|
Датчик частоты вращения (та- |
BR |
|
|
хогенератор) |
|
|
|
Звукосниматель |
BS |
|
|
Датчик скорости |
BV |
С |
Конденсаторы |
|
|
D |
Схемы интегральные, |
Схема интегральная аналого- |
DA |
|
микросборки |
вая |
|
|
|
Схема интегральная цифро- |
DD |
|
|
вая; логический элемент |
|
|
|
Устройства хранения инфор- |
DS |
|
|
мации |
|
|
|
Устройства задержки |
DT |
Е |
Элементы разные |
Нагревательный элемент |
ЕК |
|
|
Лампа осветительная |
EL |
|
|
Пиропатрон |
ЕТ |
F |
Разрядники, предохра- |
Дискретный элемент защиты |
FA |
|
нители, устройства за- |
по току мгновенного дейст- |
|
|
щитные |
вия |
|
|
|
То же по току инерционного |
FP |
|
|
действия |
|
|
|
Предохранитель плавкий |
FU |
|
|
Дискретный элемент защиты |
FV |
|
|
по напряжению, разрядник |
|
G |
Генераторы, источники |
Батарея |
GB |
|
питания |
|
|
Н |
Устройства индикацион- |
Прибор звуковой сигнализа- |
НА |
|
ные и сигнальные |
ции |
|
|
|
Индикатор символьный |
НС |
|
|
Прибор световой сигнал^а- |
HL |
|
|
ции |
|
К |
Реле, контакторы, пу- |
Реле токовое |
КА |
|
скатели |
Реле указательное |
КН |
|
|
Реле электротепловое |
КК |
|
|
Контактор, магнитный пуска- |
КМ |
|
|
тель |
|
|
|
Реле времени |
КТ |
|
|
Реле напряжения |
KV |
Продолжение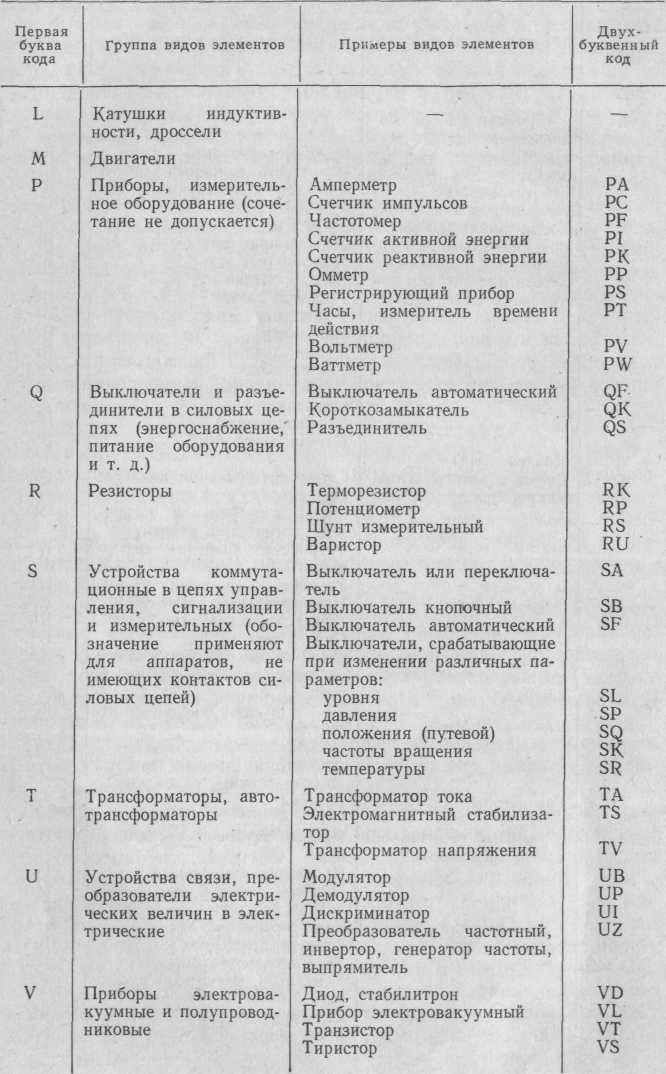
нальный; М — главный; А — вспомогательный; Q — состояние (старт, стоп, ограничение); R — возврат, сброс; S — запоминание, запись; Т — синхронизация, задержка; V — скорость; W — сложение; X — умножение, Y — аналоговый; Z — цифровой.
Буквенные коды, указывающие функциональное назначение элемента, должны быть пояснены на принципиальной схеме или другим способом, например при описании работы схемы.
Для облегчения ориентации в схемах их разбивают на зоны, т. е. производят маркировку цепей и их участков в соответствии с ГОСТ 2.709—72. Участки цепей, разделенные контактами, обмотками, резисторами, диодами и другими элементами или их частями, считаются разными участками и маркируются различно (см. рис. 6, б). На схемах, где используют многопозиционные аппараты (ключи, переключатели, программные устройства и т. п.), помещают диаграммы и таблицы переключений их контактов.
Для программных устройств, конечных и путевых* выключателей и других аналогичных аппаратов на схемах могут быть показаны диаграммы их работы с пояснениями. В необходимых случаях приводят циклограммы работы оборудования и аппаратуры.
Для анализа процессов в системах автоматического регулирования (САР) и управления (САУ) широко используются структурные схемы. Они представляют собой графическое изображение уравнения, описывающего процесс. Структурная схема по-
зволяет в наглядной форме представить математическую сторону преобразования входных и возмущающих сигналов и формирование выходного сигнала (см. § 32).
В структурных схемах отражаются функциональные зависимости, не связанные с конкретной областью техники, имеющие общий характер.
Каждый элемент схемы изображают в виде прямоугольника с одним входом и одним выходом. В прямоугольник записывается символ, обозначающий передаточную функцию, представляющую собой математическое соотношение между выходом и входом. Входная, возмущающая и выходная переменные рассматриваются как символы. Прямоугольники соединяются стрелками, указывающими направление действия связей (см. гл. 5).