

§ 32. Структурные схемы и их преобразование
Структурная схема системы автоматического управления представляет собой ее динамическую модель и состоит из отдельных типовых динамических звеньев, отражающих динамические свойства системы в целом.
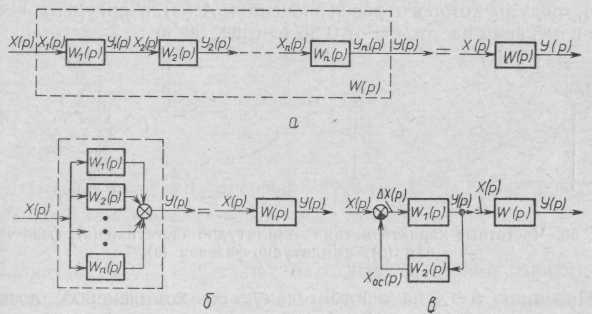
Рис. 59. Способы соединений звеньев: последовательное (а), параллельное (б), последовательно-параллельное (в)
Чтобы получить структурную схему автоматической системы управления, необходимо каждый ее функциональный элемент заменить соответствующим динамическим звеном и соединить их в той же последовательности. Графически структурная схема системы изображается в виде прямоугольников, в которых записываются передаточные функции звеньев. Связи между звеньями обозначаются линиями со стрелками, указывающими направление передачи сигнала.
Звенья, образующие структурную схему, могут быть соединены между собой последовательно, параллельно или встречно-параллельно. Зная передаточные функции отдельных звеньев, образующих структурную схему системы, и пользуясь определенными правилами эквивалентного преобразования структурных схем, можно получить передаточную функцию системы любой сложности и упростить структурные схемы системы в целом.
Последовательное соединение звеньев. Последовательным называется такое соединение звеньев системы, при котором выход каждого предыдущего связан с входом последующего звена (рис. 59, а). При таком соединении звеньев все воздействия передаются после-
довательно от одного звена к другому. При последовательном соединении п звеньев с передаточными функциями W1 (p), W2 (р) . . . . . . Wn (p) будем иметь следующую систему уравнений:
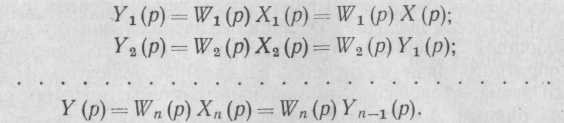
Решая эту систему уравнений относительно входной X (р) и выходной Y (р) величин, получим
Y(p) = W1(p)W2(p). . .Wn(p)X(p). Передаточная функция системы в целом
W(p)=[Y(p)]/[X(p)]=W1(p) W2,(p). . .Wn(p),
следовательно, передаточная функция автоматической системы, состоящей из п последовательно соединенных звеньев, равна произведению передаточных функции всех звеньев, входящих в соединение.
Параллельное соединение звеньев. Параллельным называется такое соединение, при котором входные воздействия всех звеньев одинаковы, а выходная величина системы равна сумме выходных величин отдельных звеньев (рис. 59, б). Так, для системы, состоящей из n параллельно соединенных звеньев, можно записать:
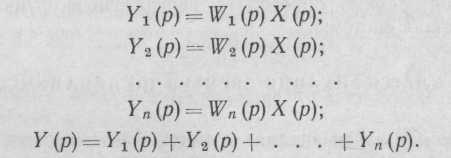
Решая эту систему уравнений относительно Y (р) и X (р), получим
Y(p) = [W1(p) + W2(p)+ . . . +Wn(p)]Y(p).
Следовательно, систему, состоящую из п параллельно соединенных звеньев, можно заменить одним эквивалентным звеном, передаточная функция которого
![]()
равна сумме передаточных функций всех звеньев, входящих в это соединение.
Встречно-параллельное соединение звеньев. Если выходная величина одного звена подается на вход другого, а входная величина первого звена формируется в виде суммы его входного воздействия и выходного воздействия второго звена, как это показано
на рис. 59, в, то такое соединение называют встречно-параллельным или обратной связью.
Обратной связью называется цепь передачи воздействий с выхода системы (звена) на ее вход. Обратная связь будет положительной, если выходная величина ее звена суммируется с входной величиной системы, и отрицательной, если выходная величина цепи обратной связи вычитается из входной величины. На вход первого звена, стоящего в прямой цепи системы, подается сигнал Х (р), равный Х (р) = X (р) ± Хо.с (р).
Для системы, показанной на рис. 59, в, с отрицательной обратной связью будем иметь следующую систему уравнений:

Решая эту систему уравнений, получим
Y (Р) = [W1 (p) /(1 + W1 (p) W2 (p)] X (р).
Следовательно, систему с обратной связью можно заменить одним эквивалентным звеном, передаточная функция которого
![]()
Используя полученные выражения для преобразования структурных схем, можно определить передаточные функции любой автоматической системы.