

§ 28. Автоматический контроль расхода и давления
Расходомеры переменного перепада давления широко применяют в деревообработке для измерения расхода энергоресурсов в виде сжатого воздуха, насыщенного и перегретого пара, горячей воды и т. д. Основными элементами такого расходомера являются: 1) сужающее устройство, создающее перепад давления в потоке измеряемой среды; 2) дифференциальный манометр, измеряющий перепад давления в потоке; 3) система дистанционной передачи показаний.
Чаще всего в качестве сужающих устройств в технологических потоках применяют стандартные диафрагмы. Диафрагма представляет собой металлический диск с круглым отверстием, центр которого должен совпадать с осью трубопровода при монтаже. Со стороны входа диафрагма имеет прямоугольную кромку, а со стороны выхода — коническую расточку под углом 30—45°.
В трубопроводах диаметром до 400 мм отбор давлений до и после диафрагмы осуществляют с помощью кольцевых камер. На рис. 50, а показана камерная диафрагма. Она состоит из собственно диафрагмы 1 и двух кольцевых камер 2 и 3, предназначенных для отбора давлений. Кольцевые камеры 2 и 3 представляют собой два профилированных кольца, расположенных по обе стороны диафрагмы. Выточки в кольцах при сборке образуют камеры, которые соединены с внутренним пространством трубопровода через кольцеобразные щели, расположенные непосредственно у торцевой поверхности диафрагмы. Таким образом, отбор давления в камерных диафрагмах производят по периметру трубопровода-т. е. измеряют среднее значение давления. К камерам присоеди-нены трубки 4 и 5, передающие перепад давления от диафрагмы к дифманометру.
Для измерения перепада давления на сужающем устройстве применяют различные дифференциальные мано-
метры. На рис. 50, б представлена схема сильфонного дифма-нометра ДС-П, состоящего из измерительного блока и пневмоси-лового преобразователя.
Чувствительными элементами измерительного блока дифмано-метра являются сильфоны 2, 5, расположенные в корпусе 4 и одним концом жестко связанные с основанием рычага 6, а другим -—
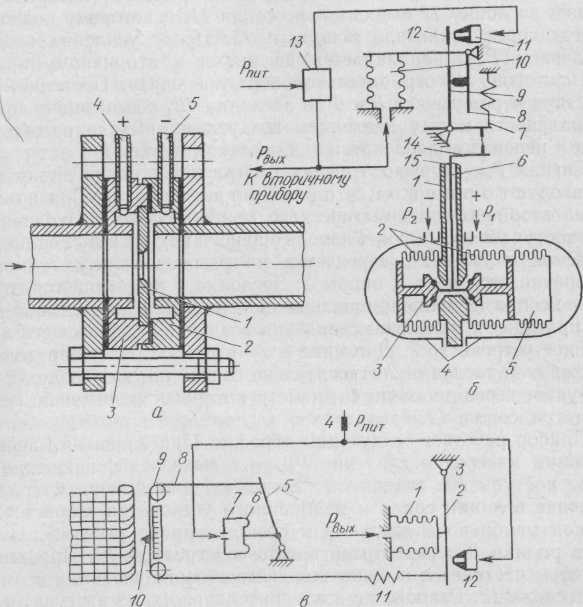
Рис. 50. Расходомер переменного перепада давления:
а — сужающее устройство; б —- дифманометр; в — вторичный прибор
с клапанами 3. Внутренняя полость чувствительных элементов заполнена кремнийорганической жидкостью или дистиллированной водой в зависимости от температуры окружающей среды.
Конструкция вывода рычага 6 обеспечивает возможность его поворота вместе с траверсой 14 относительно своей оси, что позволяет изменять влияние рабочего избыточного давления на выходной сигнал прибора.
Пневмосиловой преобразователь состоит из передаточного механизма, включающего Г-образный рычаг 8 и Т-образный рычаг 9, один конец которого прикреплен к пружине 7 и связан шарниром с траверсой 14 измерительного блока; индикатора рассогласова-
ния, содержащего сопло 11 и заслонку 12; усилителя 13 и сильфона 10 отрицательной обратной связи.
При изменении перепада давления сильфоны 2 деформируются, перемещая связывающий их шток. При движении штока рычаг 6 поворачивается относительно точки опоры в центре гибкой разделительной мембраны 15 трубки 1. С другой стороны мембраны к рычагу 6 тягой подсоединен Т-образный рычаг 9, который перемещает заслонку 12 относительно сопла 11, к которому подводится воздух через усилитель мощности 13. После усиления воздух с давлением РВЫх направляется на выход к вторичному прибору и к сильфону 10 отрицательной обратной связи. Последний, воздействуя через рычаги 8 и 9 на заслонку 12, обеспечивает пропорциональность между давлением воздуха на выходе преобразователя и перепадом давления на сильфонном блоке.
Сигнал РВых с выхода дифманометра подается по линии связи на вход вторичного прибора. На рис. 50, в показана схема вторичного пневматического прибора ПВ1.3. Входной сигнал поступает в сильфон / измерительного механизма. Усилие, развиваемое сильфоном, передается на рычаг-заслонку 2, которая поворачивается вокруг опоры 3. Заслонка 2 перемещается относительно сопла 12 пропорционально значению входного сигнала Рвых , что приводит к изменению давления воздуха, поступающего в мембранное устройство 7. Давление в линии сопла будет определяться положением заслонки 2 относительно сопла, так как воздух к нему поступает через дроссель 4, диаметр которого значительно меньше диаметра сопла 12.
Прибор работает следующим образом. При изменении перепада давления изменится давление Рвых на выходе дифманометра, которое поступает в сильфон 1. Заслонка приблизится к соплу, и давление в линии сопла и мембранного устройства возрастет. Чашечная мембрана 6 выгнется и отведет вправо рычаг 5. Нить 8 через ролики 9 переместится вместе со стрелкой 10. Пружина 11 при этом растянется и будет воздействовать на заслонку 2, отводя ее от сопла 12. Равновесие в измерительной схеме наступит тогда, когда усилие, развиваемое измерительным сильфоном 1, уравновесится усилием, развиваемым в противоположном направлении пружиной 11.
Существует ряд дифференциальных манометров-расходомеров, у которых измеряемый перепад давления преобразуется в электрический сигнал.