

§ 26. Автоматический контроль уровня
В деревообработке уровень измеряют для управления оперативными запасами измельченных древесных материалов и жидких продуктов в резервуарах и емкостях.
Существует большое число принципиальных решений конструкций автоматических уровнемеров. Рассмотрим некоторые из них, нашедшие наибольшее распространение.
Поплавковые уровнемеры. Чувствительным элементом в них является поплавок, плавающий на поверхности жидкости, который перемешается вверх или вниз в зависимости от повышения или понижения уровня.
На рис. 48, а показан поплавковый уровнемер с сельсином. Поплавок 1 подвешен на тросе 2, навиваемом на мерительный барабан 3. Один оборот барабана соответствует перемещению поплавка на 0,5 м. На ось 4 барабана 3 насажено зубчатое колесо 6, сцепленное с шестерней валика счетчика 7. Натяжение троса обеспечивает противовес 8, который укреплен на тросе 9, навивающемся на барабан 10. Барабаны 3 и 10 жестко укреплены на оси 4.
Сельсин-датчик 5 связан с сельсином-приемником вторичного прибора, благодаря чему осуществляется дистанционная передача показаний. Когда уровень повышается, поплавок перемещается вверх, натяжение троса 2 ослабевает, но под действием груза 8 трос 9 начинает сматываться с барабана 10 и вновь натягивает трос 2, при этом вращение передается ротору сельсина-датчика 5 и валику счетчика 7. Диапазон измерения уровня 0—10 м.
Чувствительным элементом буйкового уровнемера является металлический цилиндрический буек, частично погруженный в контролируемую жидкость. На рис. 48, б показана схема одного из типов буйковых уровнемеров.
Объект 1, уровень жидкости в котором контролируется, сообщен с камерой 11, где находится буек 10, подвешенный на тросе к рычагу 3. Через упругий элемент 2 рычаг выведен из камеры
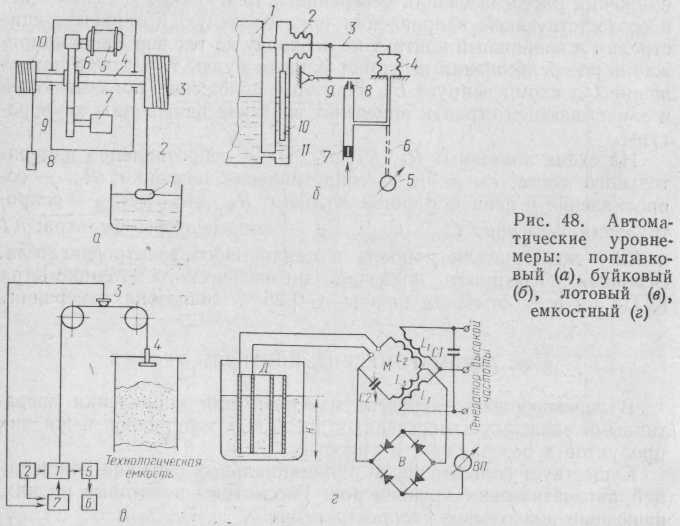
и кинематически связан с заслонкой 9 и сильфоном обратной связи 4. К соплу 8 через постоянный дроссель 7 подается сжатый воздух под давлением 1,37 МПа.
Изменение уровня в объекте скажется и на величине уровня в камере 11, в результате чего изменится выталкивающая сила, действующая на буек, и он переместится либо вверх (при повышении уровня), либо вниз (при его понижении). При этом переместится рычаг 3, а вместе с ним и заслонка 9 относительно сопла 8. Это вызовет изменение давления воздуха в линии 6 вторичного прибора 5 и внутри сильфона 4, который, воздействуя на рычаг 3, стремится возвратить заслонку в исходное положение. Шкала прибора 5 проградуирована в миллиметрах или метрах.
Уровнемеры этого типа широко применяют для измерения уровня различных жидкостей в диапазоне от 0 до 9000 мм на различных объектах и при любых давлениях.
Для измерения уровня сыпучих материалов, изменяющихся в широком диапазоне — до нескольких десятков метров, приме-
няют специальные лотовые установки, в которых уровень непрерывно контролируется с помощью груза (лота), находящегося на поверхности материала. На рис. 48, в показана структурная схема уровнемера для емкостей с большим диапазоном изменения уровня. Основной его элемент — электромеханическая лебедка 1 с электротормозом 2, приводимая во вращение от электродвигателя. На цилиндрический барабан лебедки наматывается трос, к которому подвешивается груз 4. С валом барабана через механический редуктор соединен сельсин-датчик 5, электрически связанный с сельсином-приемником 6 вторичного прибора. Трос, на котором подвешен груз, проходит через направляющие ролики, а также через ролик реле троса 3 — чувствительного элемента установки. Управление осуществляет блок 7 управления, в котором расположены все кнопки управления, релейная схема, реле времени, а также сигнальная арматура. До начала измерения груз 4 находится в бункере в верхнем фиксированном положении. При необходимости измерения однократно нажимается кнопка «Пуск». Далее весь цикл измерения производится автоматически.
При измерении включается электролебедка, груз опускается до уровня материала и ложится на него, натяжение троса при этом ослабевает. Ослабление троса вызывает срабатывание реле троса, которое отключает цепь электродвигателя, и электролебедка останавливается. Через несколько секунд выдержки, необходимой для регистрации показаний значения уровня, лебедка включается на подъем груза. Дойдя до исходного положения, лебедка с помощью конечного выключателя останавливается. Затем начинается новый цикл измерения.
Электрические уровнемеры. Чувствительный элемент электрических уровнемеров выдает сигнал, пропорциональный уровню в объекте измерения.
Чаще других применяют емкостные уровнемеры, чувствительным элементом которых является электрический конденсатор специальной конструкции, погружаемый в контролируемую среду. На рис. 48, г показана упрощенная схема емкостного уровнемера, которая состоит из емкостного датчика Д, измерительного моста переменного тока М, выпрямителя и вторичного прибора ВП со шкалой, проградуированной в единицах уровня, и генератора высокой частоты (на схеме не показан).
Емкостный датчик представляет собой цилиндрический конденсатор, выполненный в виде двух ?соосно расположенных металлических трубок. Емкость такого конденсатора зависит от уровня контролируемой среды в технологическом объекте. .
Измерительный мост М, плечи которого образованы индуктив-ностями L2 и L3, переменным конденсатором С2 (для регулировки моста при установке нуля) и емкостным датчиком Д, питается от генератора высокой частоты через колебательный контур, образованный индуктивностью L1 и конденсатором С1. При изменении уровня в контролируемом объекте изменяется емкость датчика в результате чего нарушается равновесие моста М, и на вход вы-
прямителя поступает сигнал в виде высокочастотного напряжения разбаланса. С выхода выпрямителя сигнал, уже в виде постоянного тока, поступает на вход вторичного прибора ВП (милливольтметр или потенциометр), шкала которого градуирована в единицах длины, т. е. уровня.
В зависимости от модификации приборы этого типа обеспечивают измерение уровня различных жидкостей (вода, растворы кислот и щелочей, смол и др.) в диапазоне 0—5м. Возможна конструкция уровнемера, при которой датчик имеет один электрод, а вторым является корпус объекта, в котором измеряется уровень.