

§ 17. Регулирующие органы и их характеристики
Регулирующий орган предназначен для изменения расхода регулирующей среды, энергии или каких-либо других величин с целью обеспечения заданного режима работы объекта. В автоматических системах регулирования применяют различные типы регулирующих органов: дроссельные (клапаны, поворотные заслонки, шиберы, краны) устройства, регулирующие расход жидкостей путем изменения напора, устройства, регулирующие расход сыпучих материалов (дисковые, шнековые, ленточные, лопастные, скрепковые и другие).
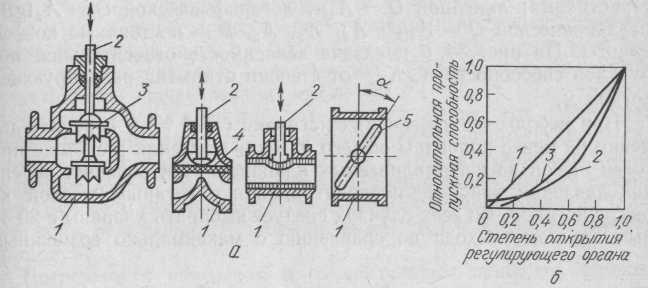
Рис. 34. Регулирующие органы:
а — конструкции; б — характеристики; 1 — корпус; 2 — шток; 3 — клапана; 4 — мембрана; 5 — заслонка
Характеристики регулирующих органов важны для работоспособности систем автоматического регулирования, так как они являются одним из звеньев системы. Регулирующие органы могут обеспечивать непрерывное и двухпозиционное регулирование.
При непрерывном регулировании необходимо, чтобы пропускная характеристика регулирующего органа была строго определенной. Для этой цели могут применяться поворотные заслонки, регулирующие клапаны (односедельные, двухседельные, диафрагмовые, шланговые и др.), шиберы, краны (рис. 34, а).
При двухпозиционном регулировании затвор регулирующего органа быстро перемещается из одного крайнего положения в другое.
Параметром, характеризующим регулирующие органы и имеющим при различных условиях эксплуатации первостепенное значение, является пропускная способность — расход жидкости с плотностью 1000 кг/м3, пропускаемой регулирующим органом при перепаде давления на нем 0,1 МН/см2. Пропускная способность измеряется в м3/ч. Условная пропускная способность Кvу — номинальное значение пропускной способности при максимальном ходе затвора, м3/ч.
Пропускная характеристика устанавливает зависимость пропускной способности от перемещения затвора Кv = = f (S) при постоянном перепаде давления. В справочной литературе значения коэффициента пропускной способности приводятся для полностью открытых регулирующих органов. Расходная характеристика — зависимость относительного расхода среды от степени открытия регулирующего органа = f (S), где = Q1/Qmax, Q1 — расход среды при некотором открытии регулирующего органа, Qmax — расход среды при полностью открытом регулирующем органе. Расходная характеристика является рабочей. Регулирующие органы исполняются (рис. 34, а) с характеристиками: линейной Q = A1 , логарифмической Q = =A2tgB , параболической Q = А3 2; А1, А2, А3, В — постоянные коэффициенты. На рис. 34, б показана зависимость относительной пропускной способности Кv /Kvy от степени открытия регулирующего органа S.
При небольших изменениях нагрузки (до 5 %) и перепаде давления не менее половины общего падения давления в системе пригоден любой из изготавливаемых клапанов. При больших перепадах давления наиболее подходит клапан с логарифмической характеристикой. Во всех случаях следует выбирать клапаны с 20 %-ным запасом расхода по сравнению с максимально возможным.