

§ 15. Исполнительные механизмы с электромагнитными
ПРИВОДАМИ
Электромагнитные исполнительные механизмы объединяют приводы с электромагнитами и приводы с электромагнитными муфтами Исполнительные механизмы с приводом от электромагнитных
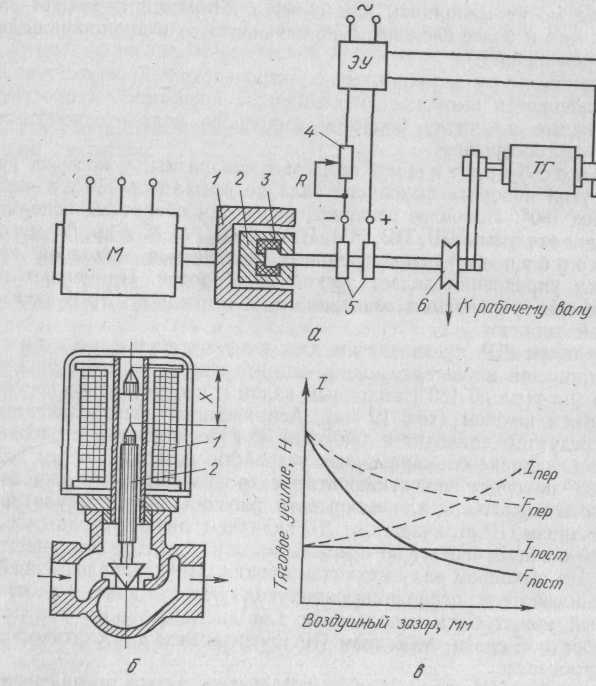
Рис. 32. Принципиальные схемы электромагнитных приводов:
а - электромагнитные муфты скольжения; б - электромагнит; в - характеристики
электромагнита
муфт. Такие механизмы применяются в основном для передачи вращательного движения. Существует два типа муфт: фрикционные и электромагнитные муфты скольжения.
Фрикционные муфты предназначены для периодического включения и отключения валов механизмов. Конструктивно они
состоят из ведомых и ведущих дисков муфт. Силы трения, возникающие между их поверхностями, позволяют передавать крутящий момент. Электромагнитные муфты скольжения представляют собой устройства для плавного регулирования частоты вращения рабочего вала, приводимого в движение электродвигателем переменного тока, в пределах 1 10 (рис. 32, а).
Муфта состоит из двух половин — ведущей (якоря) 1, ведомой (индуктора) 2 с обмоткой 3. Первая приводится от асинхронного электродвигателя, вторая соединена с валом рабочей машины через шкив 6. Обмотка питается постоянным током от усилителя ЭУ, присоединенного через сопротивление R4 к контактным кольцам 5. С изменением силы тока в обмотке изменяются величина магнитного потока и величина скольжения ведомой части муфты 2 относительно ведущей 1. При этом плавно изменяется частота вращения вала муфты.
Тахогенератор и электронный усилитель образуют контур отрицательной обратной связи по скорости, что позволяет стабилизировать заданную скорость. Муфты имеют низкий КПД, поэтому применяют их редко. В эксплуатации можно встретить приводы подач деревообрабатывающих станков с муфтами скольжения типа ПМС-М в стружечных, шлифовальных, рейсмусовых и других станках.
Исполнительные механизмы с электромагнитным (соленоидным) приводом. Их используют в случаях, когда регулирующему органу необходимо сообщать поступательное перемещение. Поэтому эти механизмы применяют при двухпозиционном регулировании.
![]()
где dGВ/d — магнитная проводимость воздушного зазора ; I — сила тока в обмотке; W — число витков обмотки.
Время срабатывания электромагнита может быть определено по формуле
![]()
Тяговое усилие электромагнитов определяется по формуле
где Т = L/R — постоянная времени электромагнита; L — индуктивность обмотки при опущенном якоре, Гн; R — активное сопротивление обмотки, Ом; Кэ = Ip /Icp — коэффициент запаса электромагнита по току; Ip и Icp —рабочий ток и ток срабатывания электромагнита соответственно.
Электромагниты широко используют для управления гидравлическими золотниками, пневматическими кранами, тормозными устройствами, переключением механизмов в станках, прессах и поточных линиях. Электромагниты имеют несколько конструктивных исполнений (см. рис. 32, б) с катушкой / и поступательно перемещающимся якорем 2. Могут изготавливаться с якорем, поворачивающимся на некоторый угол.
Тяговое усилие в паспортах электромагнитов указывается для максимального рабочего хода X. Для питания электромагнитов
используют как постоянный, так и переменный ток. Часто применяют короткоходовые электромагниты (2—5 мм) МП, длинноходо-вые (50—150 мм) КМП, ВМ, электромагниты переменного тока длинноходовые ЭС (однофазные) и КМТ (трехфазные).
Тяговые характеристики электромагнитов представлены на рис. 32, в. Из характеристик очевидно, что при равных условиях у электромагнитов переменного тока тяговая характеристика хуже. Величина переменного тока зависит от воздушного зазора.