

1.4. Дифференциальные уравнения движения несвободной материальной точки в декартовой системе отсчёта
Р
Рис. 1.2
Для обозначения инерциальной системы отсчёта использована аббревиатура ИСО.
Три уравнения: X = f1(t); Y = f2(t); Z = f3(t) являются уравнениями движения точки в ИСО. Для рассматриваемой точки основное уравнение динамики имеет вид
m·a = P = ΣFiE + ΣRiE.
Спроецируем обе части последнего векторного равенства на координатные оси ИСО:
m·![]() = Σ
= Σ![]() + Σ
+ Σ![]() ;
;
m·![]() = Σ
= Σ![]() + Σ
+ Σ![]() ;
;
m·![]() = Σ
= Σ![]() + Σ
+ Σ![]() ,
,
где , , – проекции ускорения a на координатные оси; Σ , Σ , Σ – суммы проекций активных сил FiE на соответствующие координатные оси ИСО; Σ , Σ , Σ – суммы проекций реакций RiE внешних связей на оси ИСО.
Произведение массы m точки и проекции её ускорения a на координатную ось инерциальной системы отсчёта OXYZ равно сумме проекций активных сил FiЕ и реакций RiЕ внешних связей на ту же ось.
Последние уравнения называют дифференциальными уравнениями движения несвободной материальной точки в декартовой инерциальной системе отсчёта.
1.5. Дифференциальные уравнения движения несвободной материальной точки в естественных координатных осях
Естественные координатные оси – прямоугольная система осей с началом в движущейся точке, направленных соответственно по касательной, главной нормали и бинормали к траектории этой точки.
Из известного студентам курса кинематики уравнение движения точки в естественных координатных осях имеет вид S = f(t), где S – дуговая координата.
Рассмотрим движение несвободной материальной точки под действием активных сил FiE и реакций RiE внешних связей в естественных координатных осях (касательная, главная нормаль, бинормаль). Для понимания излагаемого материала напомним некоторые положения, относящиеся к этому движению.
Как это отмечалось ранее, естественными координатными осями называют три взаимно-перпендикулярные оси: касательная (единичный вектор τ всегда направлен в сторону возрастания дуговой координаты S); главная нормаль (единичный вектор n направлен к центру кривизны траектории движения); бинормаль (единичный вектор b перпендикулярен векторам τ и n и направлен так же, как и вектор k по отношению к векторам i, j в правой декартовой системе отсчёта OXYZ) (рис. 1.3).
Рис. 1.3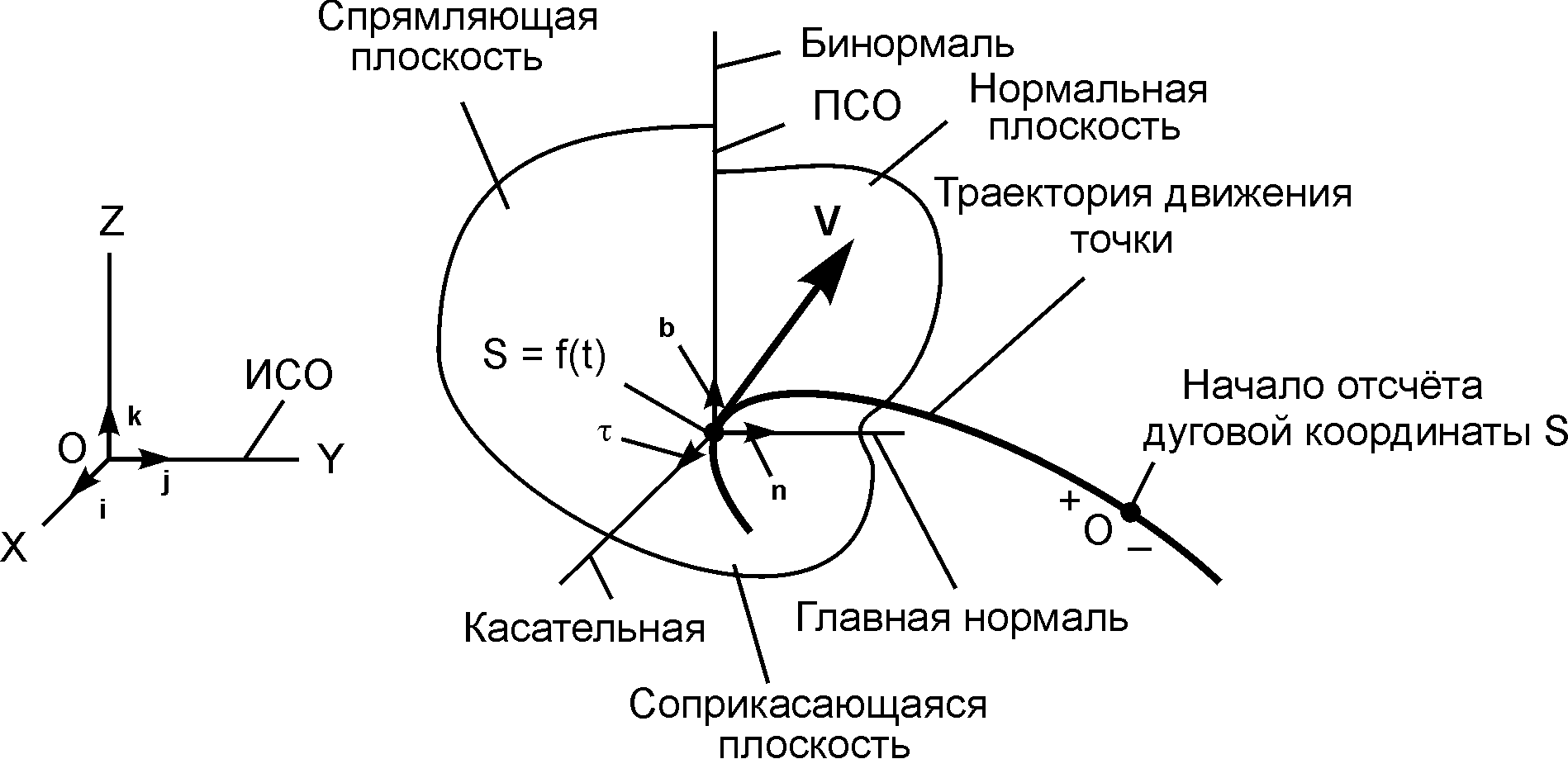
Начало естественных координатных осей всегда располагается на траектории в месте положения точки и, следовательно, перемещается вместе с точкой.
Таким образом, естественные координатные оси образуют подвижную систему отсчёта (ПСО).
Итак, рассматривается движение точки массой m в ПСО под действием активных сил и реакций внешних связей (рис. 1.4). Уравнение движения точки S = f(t) задано.
Из курса кинематики известно векторное выражение
a = aoτ + aon ,
где a – вектор ускорения точки; aoτ – вектор касательного ускорения; aon – вектор нормального ускорения.
Рис. 1.4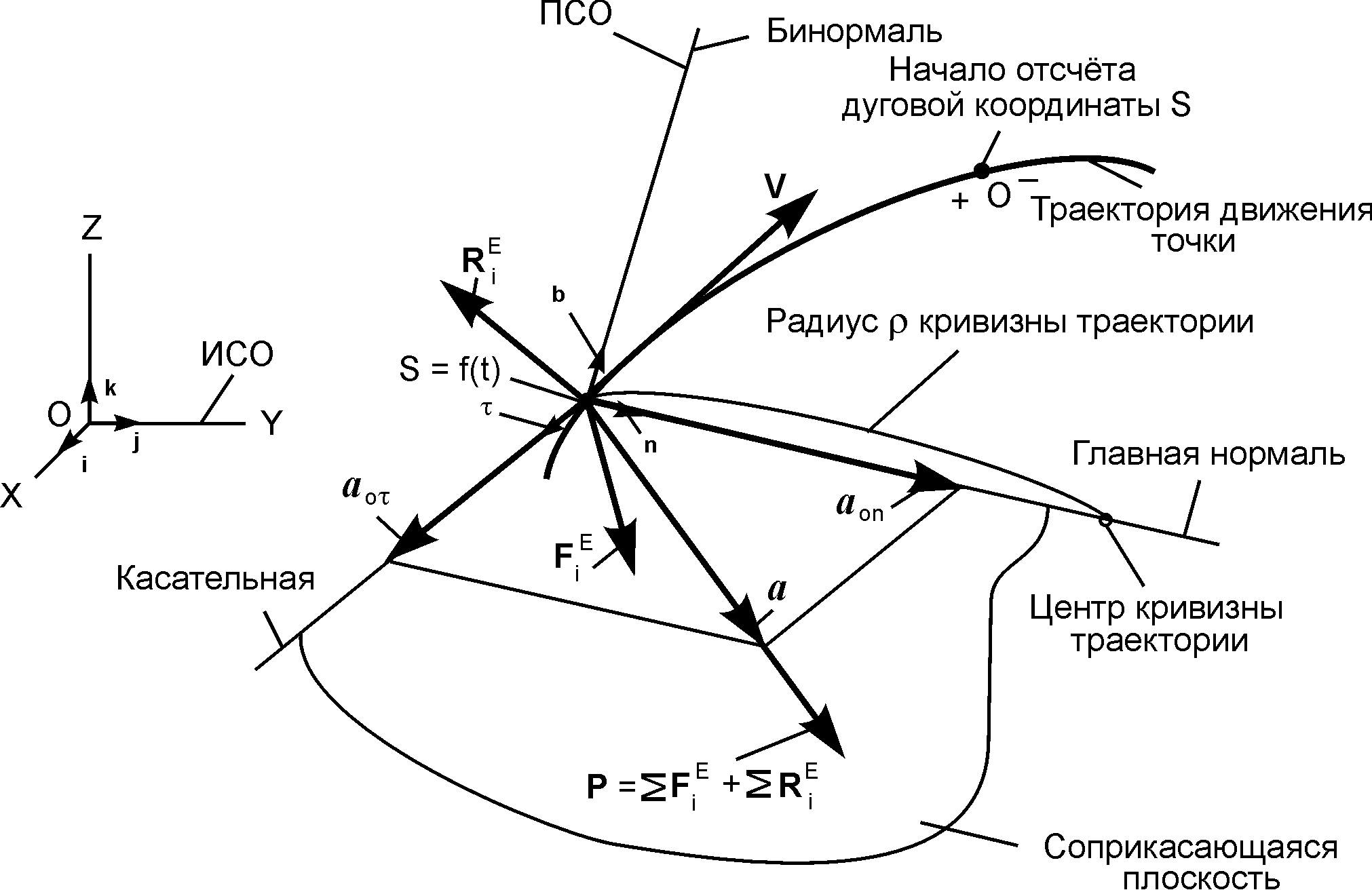
Спроецируем основное уравнение динамики m·a = ΣFiE + ΣRiE на координатные оси подвижной системы отсчёта:
m·aoτ
=
Σ![]() + Σ
+ Σ![]() ;
;
m·aon
=
Σ![]() + Σ
+ Σ![]() ;
;
m·aob
=
Σ![]() + Σ
+ Σ![]() ,
,
где aoτ, aon, aob – проекции ускорения a соответственно на касательную, главную нормаль и бинормаль; Σ , Σ , Σ – суммы проекций активных сил на оси ПСО; Σ , Σ , Σ – суммы проекций реакций внешних связей на оси ПСО.
Известно
также, что aoτ
=
![]() ;
aon
=
;
aon
=
![]() /ρ,
где ρ – радиус кривизны траектории
точки. При этом aob
= 0, так как вектор ускорения a
лежит
в соприкасающейся плоскости и на
бинормаль не проецируется. С учетом
изложенного выше последние математические
выражения приобретают вид:
/ρ,
где ρ – радиус кривизны траектории
точки. При этом aob
= 0, так как вектор ускорения a
лежит
в соприкасающейся плоскости и на
бинормаль не проецируется. С учетом
изложенного выше последние математические
выражения приобретают вид:
m· = Σ + Σ ;
m· /ρ = Σ + Σ ;
Σ + Σ = 0.
Произведения массы m точки и проекций её ускорения a на координатные оси ПСО равны сумме проекций активных сил FiЕ и реакций RiЕ внешних связей на те же оси ПСО.
Последние математические выражения называют дифференциальными уравнениями движения несвободной материальной точки в естественных координатных осях.
ПРИМЕЧАНИЕ. Дифференциальными уравнениями движения в естественных координатных осях удобно пользоваться тогда, когда точно известен вид траектории движения. В этом случае решение задачи существенно упрощается.