

Вопросы и задания для самоконтроля
Записать уравнение Лагранжа второго рода.
Сформулировать определение понятия «обобщённая скорость».
Сформулировать определение понятия «обобщённая сила».
7. Элементы приближённой теории гироскопов
7.1. Гироскоп с тремя степенями свободы
Гироскопом называют симметричное твёрдое тело, угловая скорость вращения которого относительно оси симметрии значительно превосходит по модулю угловую скорость вращения оси симметрии.
I I = ω1 >> I I = ω2,
где ω1, ω2 – модули угловых скоростей , .
В современных гироскопических приборах частота n1 вращения относительно оси симметрии (оси гироскопа) достигает значений 40000 – 50000 об/мин (ω1 = 4200 – 5200 рад/с), а частота n2 вращения оси симметрии равна одному обороту за 2 – 3 минуты (n2 = 3, 14 – 4, 73 об/мин) и даже за 20 минут (n2 = 0,314 об/мин) для гирокомпасов.
Р
Рис. 7.1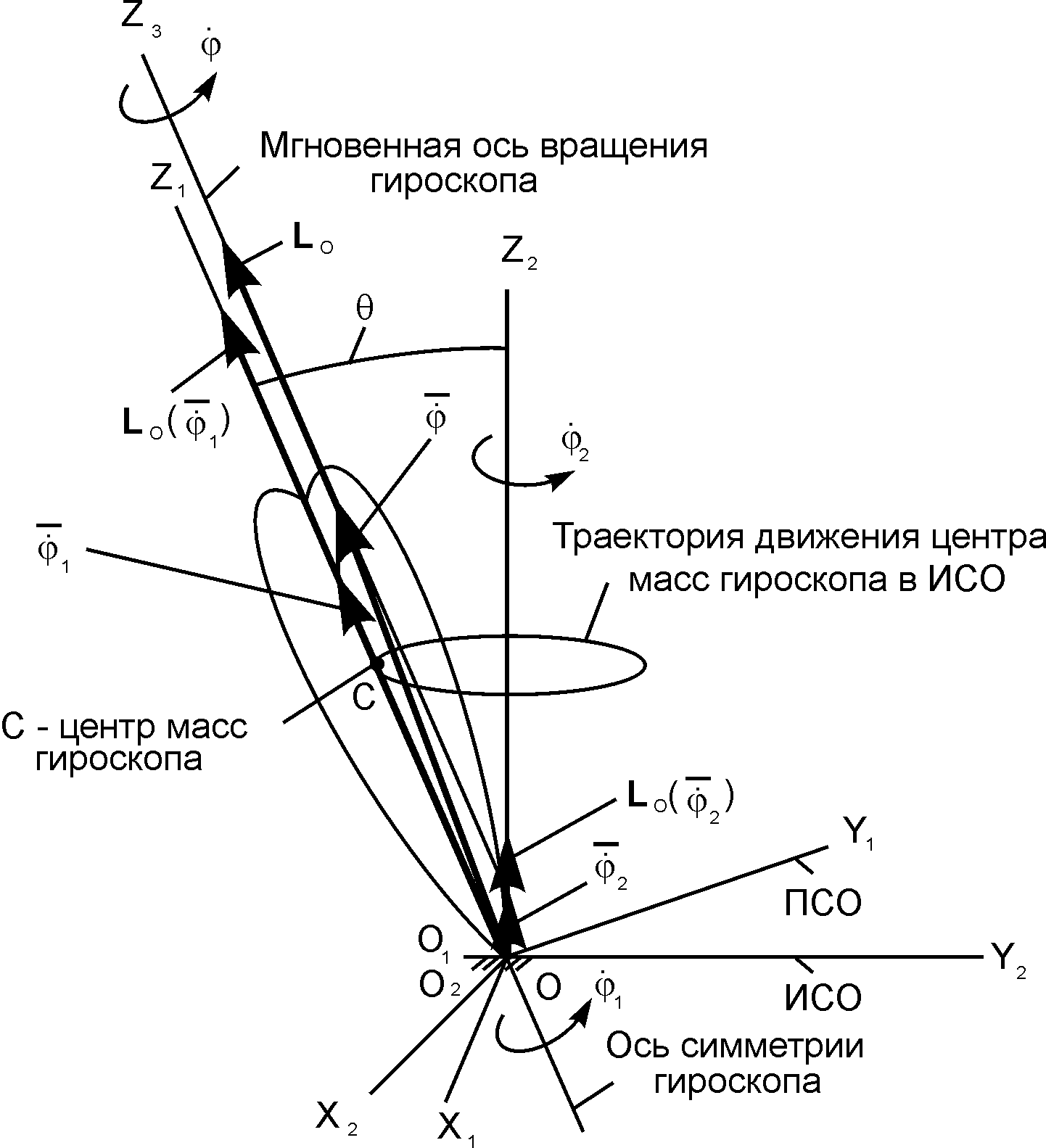
На
рис. 1 приняты условные обозначения:
O2X2Y2Z2
– инерциальная система отсчёта (ИСО);
O1X1Y1Z1
– подвижная система отсчёта (ПСО);
![]() – вектор угловой скорости
вращения гироскопа относительно оси
симметрии (ось симметрии гироскопа
совпадает с осью O1Z1
подвижной системы отсчёта);
– вектор угловой скорости
вращения гироскопа относительно оси
симметрии (ось симметрии гироскопа
совпадает с осью O1Z1
подвижной системы отсчёта);
![]() – вектор угловой скорости
вращения оси O1Z1
симметрии гироскопа относительно оси
O2Z2
инерциальной системы отсчёта O2X2Y2Z2;
θ – угол наклона оси O1Z1
симметрии к оси O2Z2
инерциальной системы отсчёта (угол
нутации); LO(
)
– кинетический момент гироскопа
относительно точки О при его вращении
вокруг оси симметрии O1Z1
с угловой скоростью
;
LO(
)
– кинетический момент гироскопа
относительно точки О при его вращении
вокруг оси O2Z2
инерциальной системы отсчёта O2X2Y2Z2
с угловой скоростью
;
LO
– кинетический момент гироскопа
относительно точки О при его вращении
с угловой скоростью
вокруг мгновенной оси вращения OZ3;
– вектор угловой скорости
вращения оси O1Z1
симметрии гироскопа относительно оси
O2Z2
инерциальной системы отсчёта O2X2Y2Z2;
θ – угол наклона оси O1Z1
симметрии к оси O2Z2
инерциальной системы отсчёта (угол
нутации); LO(
)
– кинетический момент гироскопа
относительно точки О при его вращении
вокруг оси симметрии O1Z1
с угловой скоростью
;
LO(
)
– кинетический момент гироскопа
относительно точки О при его вращении
вокруг оси O2Z2
инерциальной системы отсчёта O2X2Y2Z2
с угловой скоростью
;
LO
– кинетический момент гироскопа
относительно точки О при его вращении
с угловой скоростью
вокруг мгновенной оси вращения OZ3;
![]() – вектор угловой скорости
вращения гироскопа относительно
мгновенной оси вращения OZ3.
– вектор угловой скорости
вращения гироскопа относительно
мгновенной оси вращения OZ3.
Начала О1 подвижной системы отсчёта O1X1Y1Z1 и О2 инерциальной системы отсчёта O2X2Y2Z2 помещены в точку О.
Гироскоп вращается с угловой скоростью относительно оси O1Z1 симметрии, которая в свою очередь вращается с угловой скоростью относительно оси O2Z2 инерциальной системы отсчёта O2X2Y2Z2.
Вектор абсолютной угловой скорости гироскопа определяют по формуле = + . При этом вектор лежит на мгновенной оси OZ3 вращения гироскопа.
Кинетический момент LO гироскопа относительно точки О равен
LO = LO( ) + LO( ).
В развёрнутом виде последняя формула выглядит следующим образом
LO = JO1Z1·( ) + JO2Z2·( ),
где JO1Z1, JO2Z2 – моменты инерции гироскопа относительно осей O1Z1, O2Z2.
Так как I I << I I, то величина угла θ очень мала (в современных приборах она составляет доли секунды). Тогда с достаточной для инженерной практики точностью можно считать, что
LO( ) = JO2Z2·( ) = 0.
С учётом этого допущения имеем
LO = JO1Z1·( ).
И
Рис. 7.2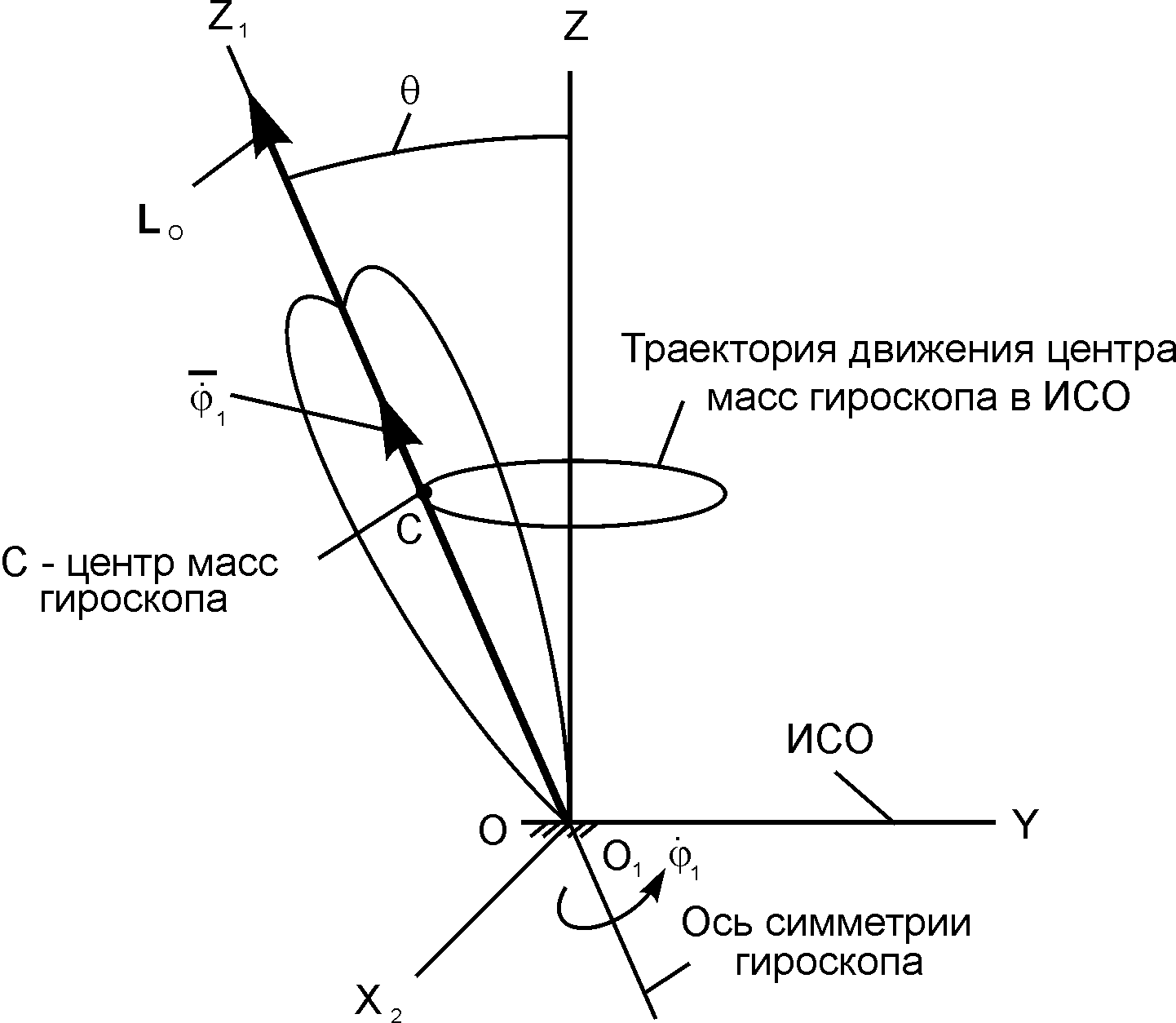
На таком допущении основана приближённая (элементарная) теория гироскопов.
При решении задач с помощью приближённой теории гироскопов удобно пользоваться теоремой Резаля, которая выражается формулой
dLO/dt
= U
= Σ MO(FiE)
+ Σ MO(RiE)
=
![]() ,
,
где LO – кинетический момент гироскопа относительно точки О; U – скорость конца вектора LO в инерциальной системе отсчёта; Σ MO(FiE), Σ MO(RiE) – геометрические суммы моментов активных сил FiE и реакций RiE внешней связи относительно точки О; – главный момент внешних сил, приложенных к гироскопу, относительно точки О.
Скорость U конца вектора LO кинетического момента гироскопа относительно точки О направлена так же , как и вектор главного момента внешних сил , приложенных к гироскопу, относительно той же точки.
Использование теоремы Резаля позволяет решать следующие задачи: 1) – по известным активным силам FiE и реакциям RiE внешней связи определяют направление движения оси симметрии гироскопа; 2) – по известному закону движения оси гироскопа определяют главный момент внешних сил .
Пример 1.
Г
Рис. 7.3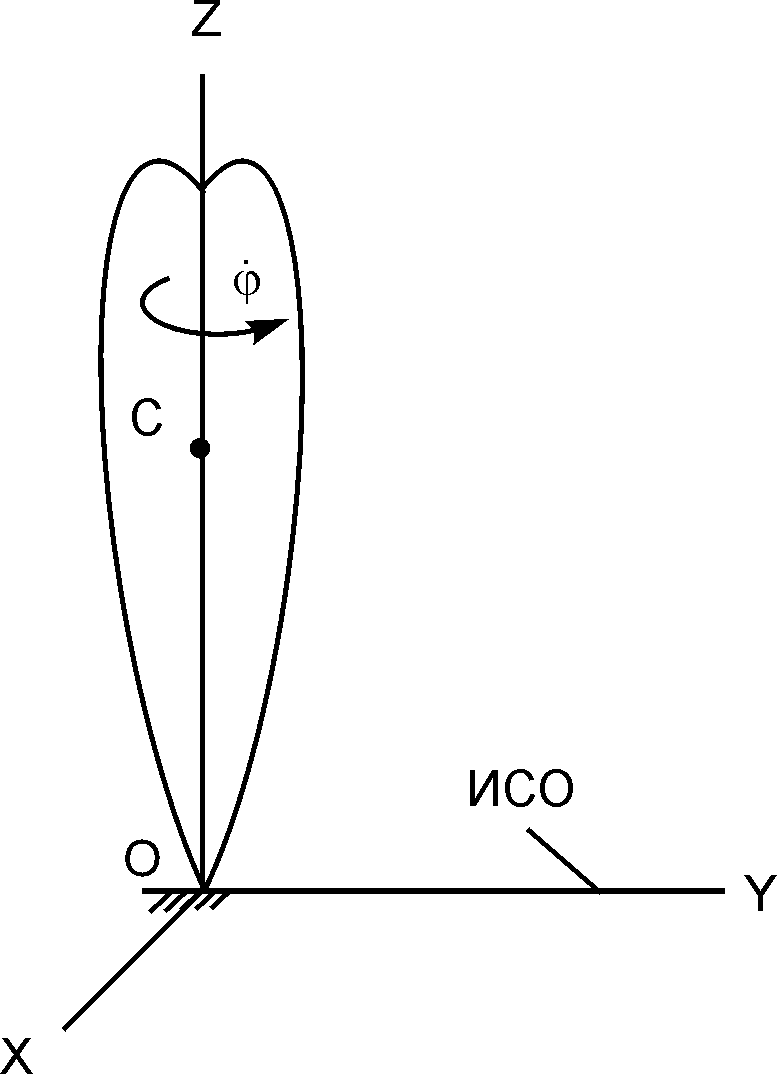
Определить направление движения оси симметрии гироскопа, если к ней приложена активная сила FiE, которая параллельна плоскости OYZ.
Решение.
Приложим к гироскопу активную силу FiE, силу тяжести G и реакции XO, YO, ZO внешней связи в точке О (рис. 7.4).
О
Рис. 7.4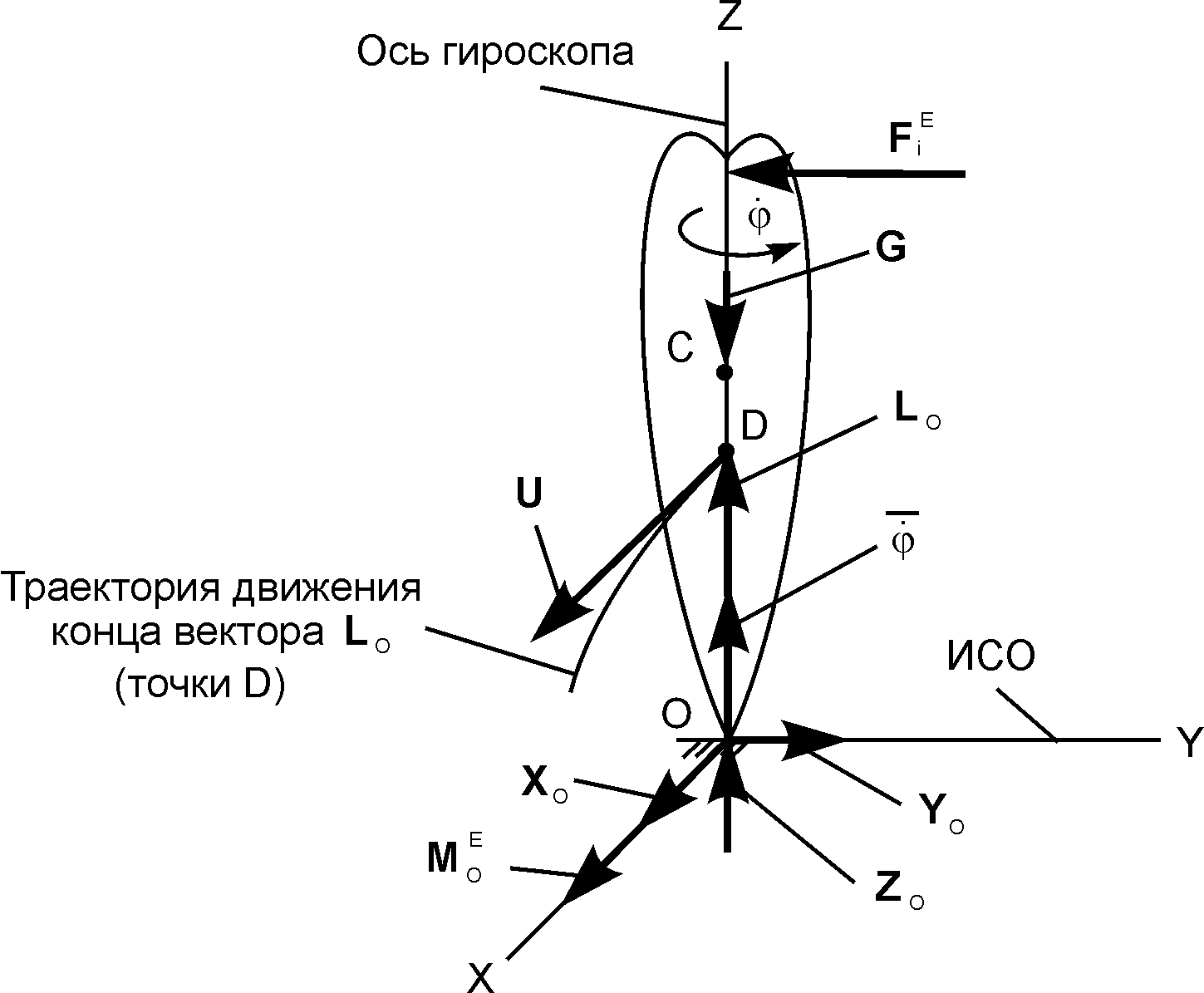
= Σ MO(FiE) + Σ MO(G) + Σ MO(XO) + Σ MO(YO) + Σ MO(ZO).
Так как Σ MO(G) = 0, Σ MO(XO) = 0; Σ MO(YO) = 0, Σ MO(ZO) = 0, то имеем
= Σ MO(FiE).
Главный момент внешних сил относительно точки О приложен в этой точке и направлен по оси ОХ в сторону увеличения координаты Х (напомним, что момент силы относительно точки направляется перпендикулярно плоскости, проходящей через силу и точку так, что с его конца видно, что сила стремится повернуть тело вокруг точки против хода часовой стрелки).
Кинетический
момент LO
= JOZ·![]() гироскопа относительно точки О направлен
в сторону вектора
угловой скорости вращения. Конец вектора
LO
обозначим точкой D.
гироскопа относительно точки О направлен
в сторону вектора
угловой скорости вращения. Конец вектора
LO
обозначим точкой D.
Применив теорему Резаля U = , направляем вектор U скорости точки D параллельно вектору .
Таким образом, ось OZ симметрии гироскопа будет перемещаться в плоскости OXZ, которая перпендикулярна направлению активной силы FiE.
Пример 2.
Определить движение тяжёлого гироскопа, ось которого составляет угол θ с вертикалью, если: – угловая скорость вращения относительно оси O1Z1 симметрии; JO1Z1 – момент инерции гироскопа относительно оси симметрии; b = OC – расстояние от центра тяжести С до точки О опоры (рис. 7.5).
Р
Рис. 7.5
Приложим
к гироскопу активную силу G
(силу тяжести) и реакции XO,
YO,
ZO
внешней связи в точке О. Модуль
![]() главного момента
внешних сил, приложенных к гироскопу
равен
главного момента
внешних сил, приложенных к гироскопу
равен
= G·OC·sin(θ).
Вектор главного момента внешних сил направлен по оси OY в сторону увеличения координаты Y.
Кинетический момент LO гироскопа относительно точки О направлен по оси симметрии в сторону вектора угловой скорости и равен по модулю
LO = JO1Z1·ω,
г
Рис. 6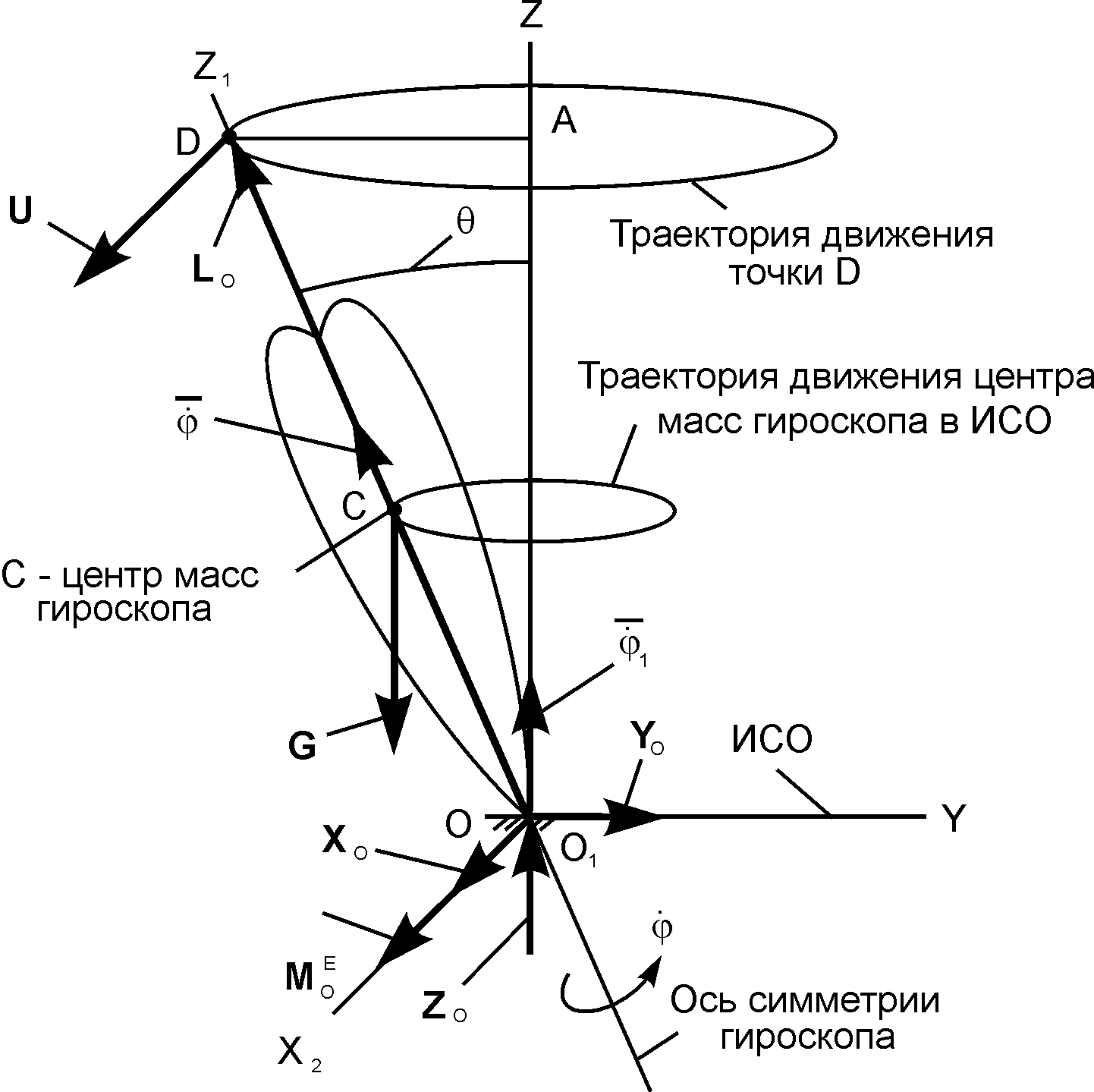
Обозначим точкой D конец вектора LO. Согласно теореме Резаля, U = . Поэтому U – скорость точки D направлена перпендикулярно к оси симметрии (параллельна оси ОХ) в сторону увеличения координаты Х. Модуль U скорости U равен
U = = G·OC·sin(θ) = const.
Таким образом, точка D имеет постоянную по модулю скорость U, направленную перпендикулярно к вертикальной плоскости, содержащей ось симметрии гироскопа. При этом ось гироскопа описывает боковую поверхность кругового конуса, поворачиваясь относительно вертикальной оси OZ с угловой скоростью . Это движение называют регулярной прецессией оси гироскопа.
Вычислим модуль ω1 угловой скорости регулярной прецессии.
ω1
= I
I
= U/(DA)
=
![]() =
=
![]() =
=
![]() .
.
Окончательно имеем
ω1 = .
Чем меньше модуль ω угловой скорости вращения гироскопа относительно его оси симметрии, тем больше модуль ω1 угловой скорости прецессии (от величины угла θ угловая скорость прецессии не зависит).
Задачи на определение движения оси гироскопа с помощью приближённой теории рекомендуется решать по следующему алгоритму.
Проверить, имеет ли гироскоп три степени свободы.
Выбрать систему координат.
Изобразить на рисунке внешние силы, приложенные к гироскопу.
Определить главный момент внешних сил относительно неподвижной точки О.
Найти кинетический момент LO гироскопа относительно неподвижной точки О.
Применив теорему Резаля U = , определить движения оси гироскопа.
В экзаменационных задачах, как правило, требуется определить ω, JO1Z1, ОС. Эти величины определяют по формулам:
ω1 = ;
JO1Z1
=
![]() ;
;
ОС
=
![]() .
.
Пример 3.
На рис. 7.7 приведена схема гироскопа в кардановом подвесе. Конструктивная схема содержит корпус 1, уравновешенный массивный круглый цилиндр, горизонтальную 3 и вертикальную рамки.
Рис. 7.7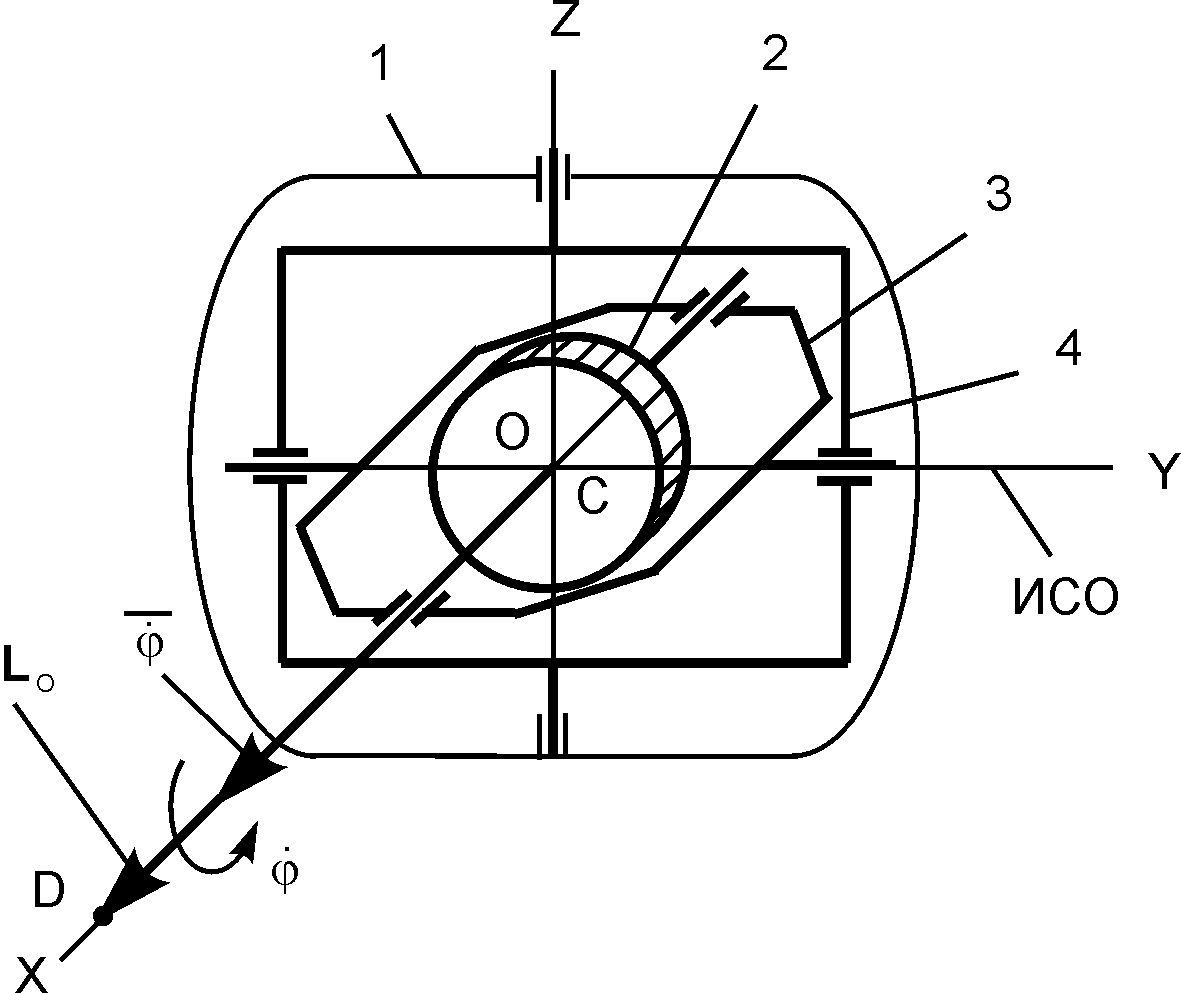
Тело 2 вращается с угловой скоростью в подшипниках горизонтальной рамки 3 относительно оси ОХ. Рамка 3 может поворачиваться в подшипниках рамки 4 относительно оси OY. В свою очередь рамка 4 может поворачиваться в подшипниках корпуса 1 гироскопа относительно оси OZ. Координатные оси OX, OY, OZ пересекаются в центре масс механической системы, состоящей из тел 2, 3, 4.
Если точки О и С совпадают, то такой гироскоп называют астатическим (уравновешенным), в противном случае – тяжёлым.
Определить изменение положения оси ОХ вращения тела 2, пренебрегая трением в подшипниках.
Решение.
Гироскоп в кардановом подвесе имеет три степени свободы, так как его положение определяется тремя независимыми углами поворота относительно осей OX, OY, OZ, пересекающихся в центре С масс механической системы, состоящей из тел 2, 3, 4. При этих условиях главный момент внешних сил относительно точки О равен нулю: ( = 0). Кинетический момент LO гироскопа направлен по оси ОХ. Конец вектора LO обозначим точкой D (см. рис 7.7).
Применив теорему Резаля (U = ), находим U = 0, т. е. скорость точки U равна нулю. Это означает, что при вращении массивного тела 2 ось ОХ гироскопа сохраняет неизменное положение в пространстве.
Таким образом, ответ на вопрос, поставленный в задаче, получен.