

5.6.3. Приведение сил инерции точек твёрдого
тела к простейшему виду
В данном учебно-методическом пособии рассматриваются неизменяемые механические системы, в которые входят тела, осуществляющие следующие виды движений: поступательное, вращательное, плоскопараллельное.
При поступательном движении силы инерции материальных точек приводятся к главному вектору Ф* сил инерции, который прикладывается в центре масс твёрдого тела (рис. 5.37) и определяется по формуле
Ф
Рис. 5.37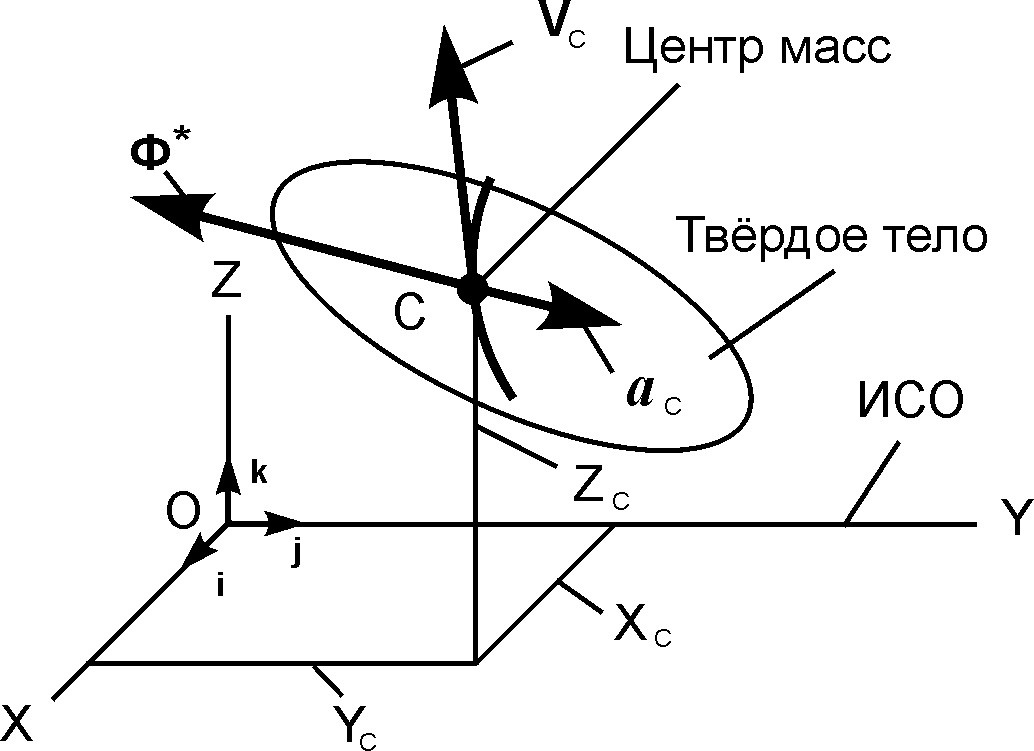
Согласно рис. 5.37 главный вектор сил инерции Ф* направлен в сторону, противоположную ускорению aС. Модуль главного вектора сил инерции определяется по формуле Ф* = m·aС.
Р
Рис. 5.38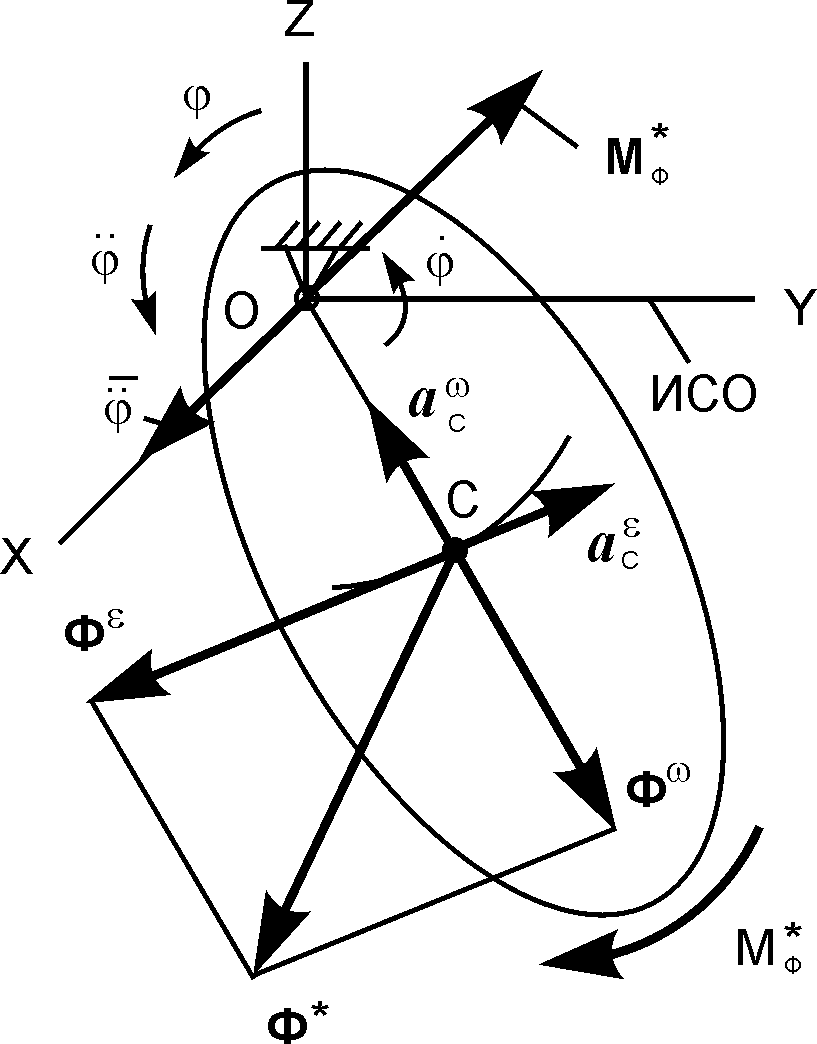
Согласно положениям кинематики имеем векторное равенство
aС
=
![]() +
+
![]() ,
,
где aС – ускорение центра масс; – центростремительное ускорение центра масс; – вращательное ускорение центра масс.
В
рассматриваемом случае силы инерции
материальных точек тела приводятся к
главному вектору Ф*
сил инерции и главному векторному
моменту
![]() ,
определяемым по формулам:
,
определяемым по формулам:
Ф* = Фω + Фε;
=
– JCX1·![]() ,
,
где Фω = – m· – центробежная сила инерции; Фε = – m· – вращательная сила инерции; JCX1 – момент инерции тела относительно оси СХ1, проходящей через центр масс; – вектор углового ускорения.
Направления сил инерции Фω, Фε показаны на рис. 5.36. Модули составляющих Фω, Фε главного вектора Ф* сил инерции и приведённого момента сил инерции определяют по формулам:
Фω
= m·((![]() )·CO);
Фε
= m·(I
I·CO);
)·CO);
Фε
= m·(I
I·CO);
![]() =
МΦ
= JCX1·I
I,
=
МΦ
= JCX1·I
I,
где m, , I I – соответственно масса, угловая скорость и модуль углового ускорения тела; СО – расстояние от центра масс до оси вращения.
В инженерной практике наиболее часто используется вариант, в котором центробежная и вращательная силы инерции прикладываются в центре масс (см. рис. 5.38). Этот вариант и рекомендуется для дальнейшего использования как основной вариант.
Для общего ознакомления приведём и другие варианты приложения сил инерции.
Рассмотрим вариант вращательного движения твёрдого тела, при котором силы инерции Фω, Фε прикладываются на оси вращения (рис. 5.39).
В этом случае модули искомых инерционных нагрузок определяются по формулам:
Фω = m·( ·CO); Фε = m·(I I·CO); = МΦ = JОX·I I,
где JОХ – момент инерции тела относительно оси вращения.
Рис. 5.39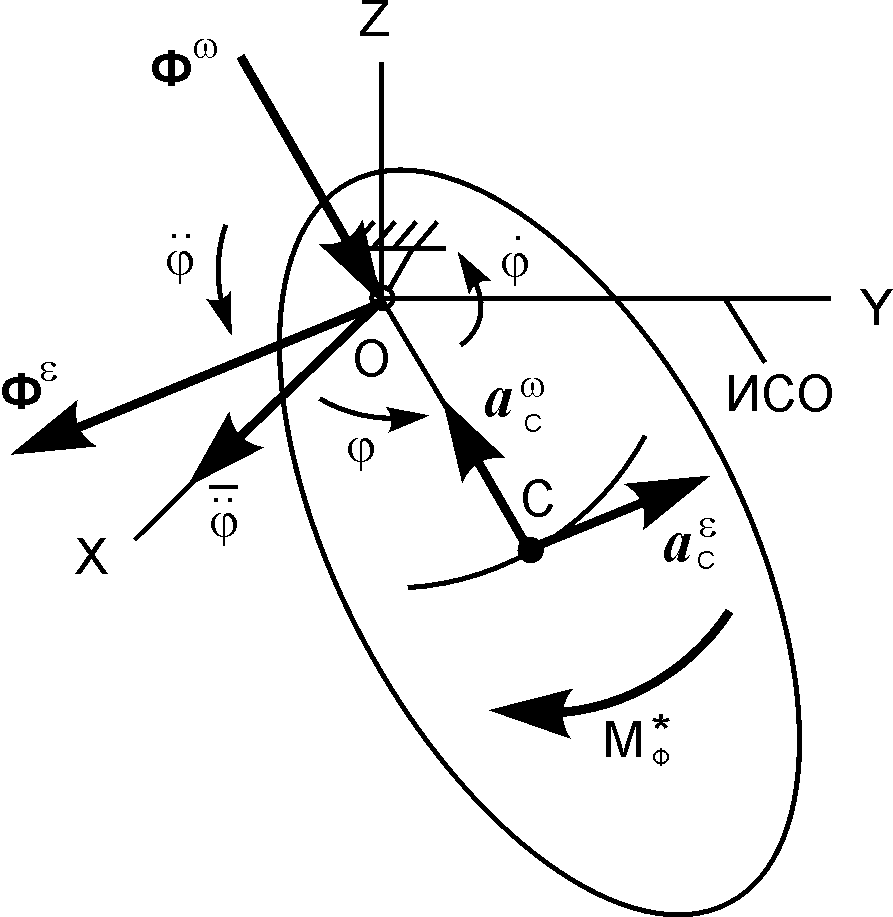
Р
Рис. 5.40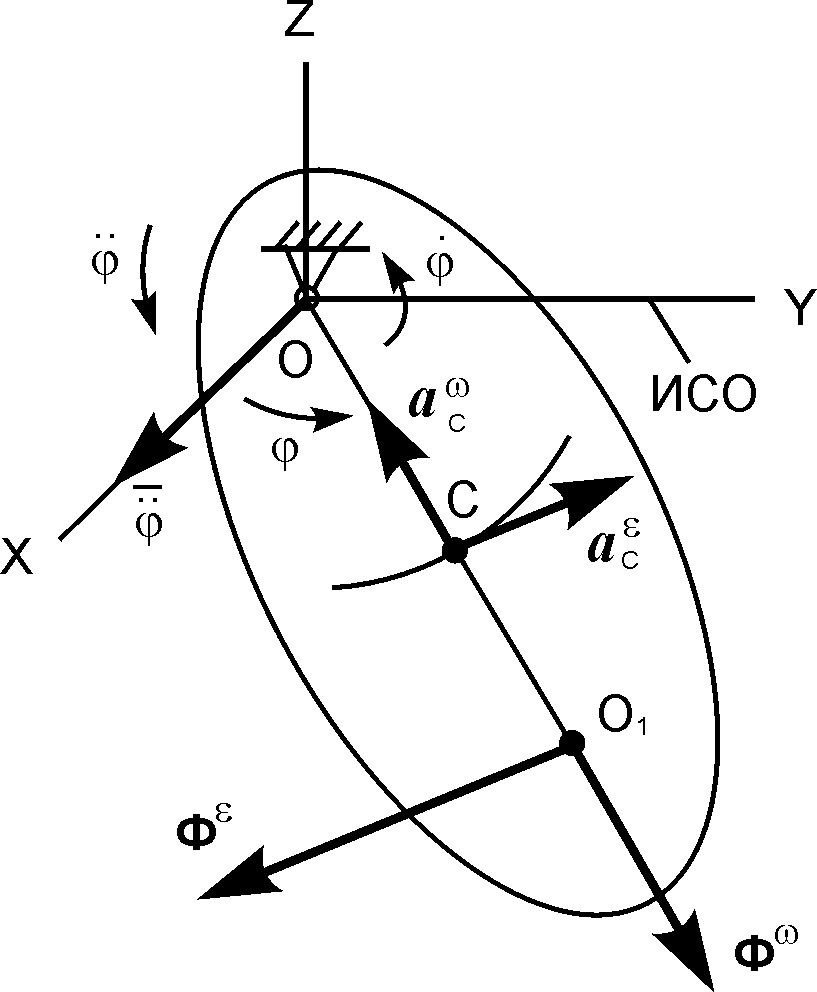
В этом случае центробежную и вращательную силы инерции прикладывают в точке О1, а расстояние ОО1 определяют по формуле
ОО1 = JОХ/(m·CO),
где JОХ – момент инерции тела относительно оси вращения.
В
Рис. 5.41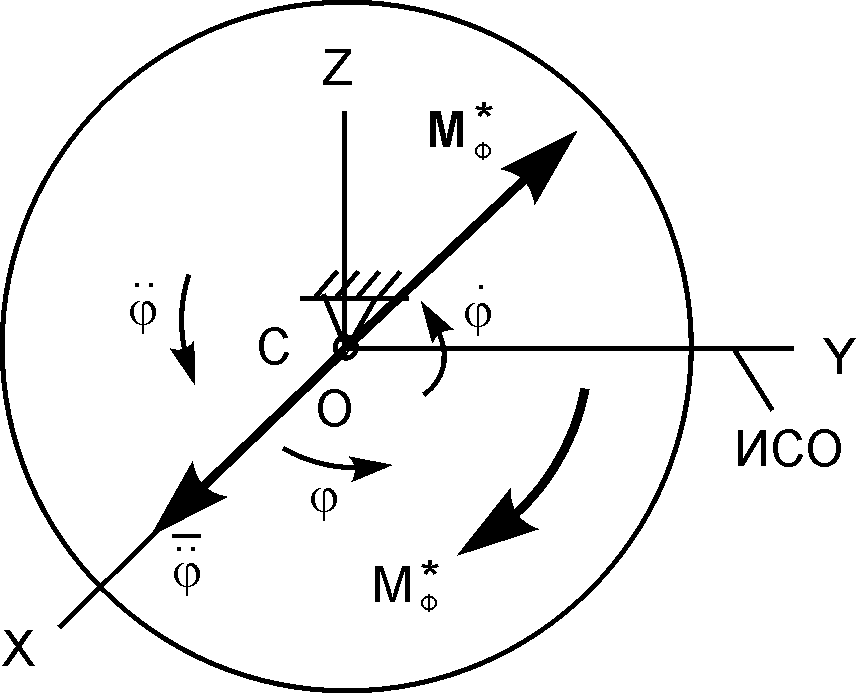
В рассматриваемом случае силы инерции материальных точек твёрдого тела приводятся к моменту МФ сил инерции.
МФ = JСХ· I I.
О
Рис. 5.42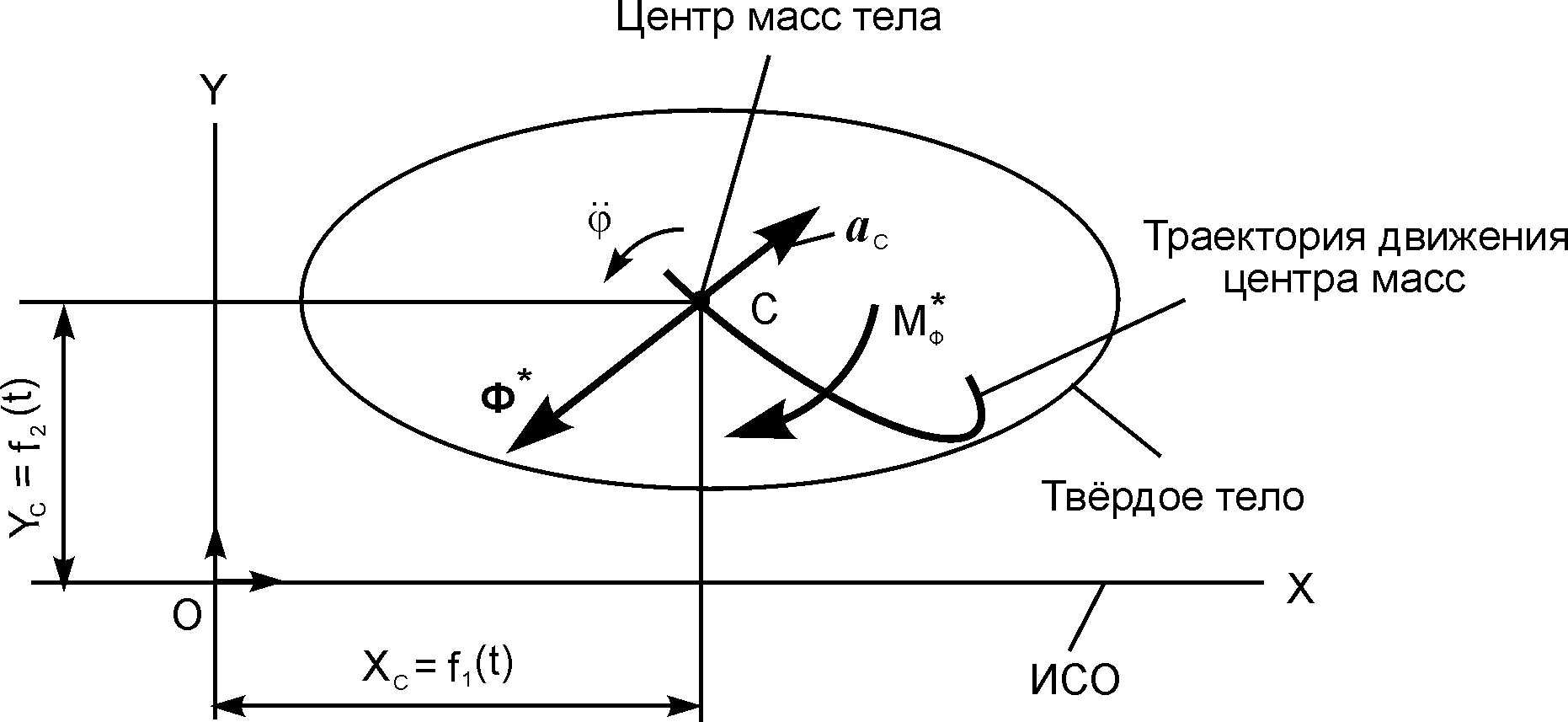
При таком движении твёрдого тела имеем:
Ф* = m·ac; МФ = JCZ·I I,
где JCZ – момент инерции тела относительно оси CZ вращения, проходящей через центр масс.
Для закрепления изложенного материала студентам рекомендуется выполнить курсовое задание Д 5.