

5.6.2. Принцип Даламбера для несвободной
механической системы
Р
Рис. 5.35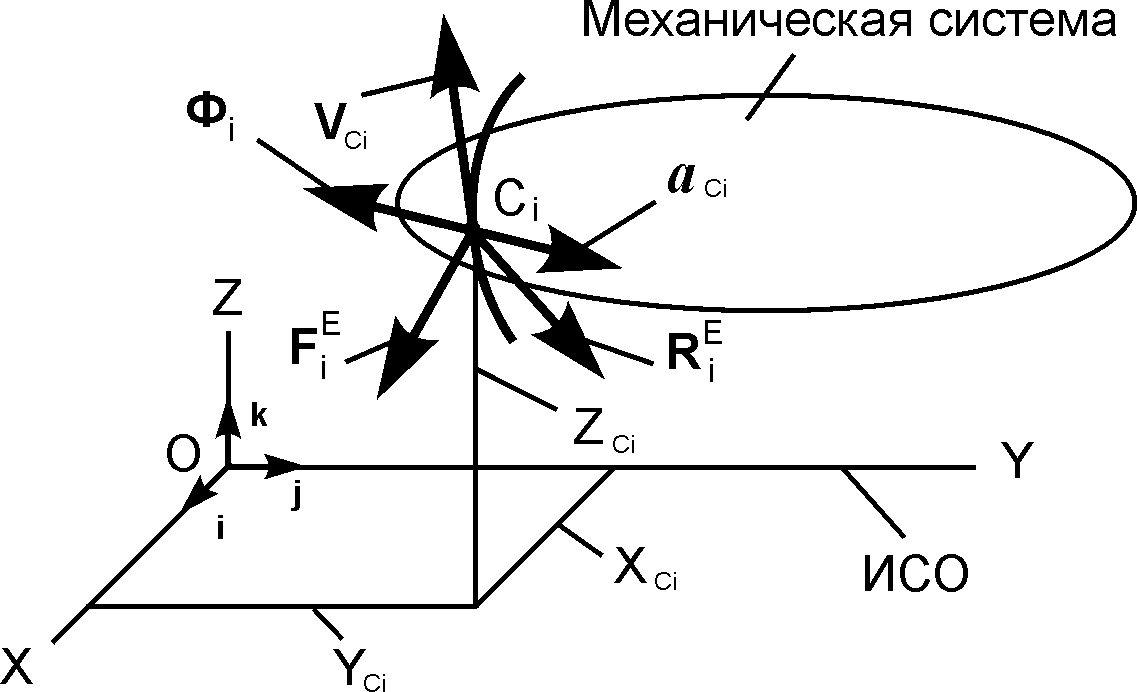
Применим принцип Даламбера для каждой точки Ci неизменяемой механической системы.
+ + + Фi = 0,
где Φi = – m·aCi – сила инерции материальной точки Ci механической системы.
Просуммируем составленные уравнения и получим выражение
Σ + Σ + Σ + ΣФi = 0.
Поскольку
механическая система неизменяемая, то
геометрическая сумма реакций
внутренних связей равна нулю (Σ![]() =
0). Тогда получим
=
0). Тогда получим
Σ + Σ + ΣФi = 0.
В любой момент времени для неизменяемой механической системы геометрическая сумма активных сил, реакций внешних связей и сил инерции равна нулю.
Это и есть принцип Даламбера для неизменяемой механической системы.
Этот принцип зачастую записывают в следующем виде:
F* + R* + Φ* = 0,
где F* = Σ – главный вектор активных сил; R* = Σ – главный вектор реакций внешних связей; Φ* = ΣФi – главный вектор сил инерции.
В любой момент времени для неизменяемой механической системы геометрическая сумма главных векторов активных сил, реакций внешних связей и сил инерции равна нулю.
Как правило, векторное равенство F* + R* + Φ* = 0, выражающее принцип Даламбера, применяют при рассмотрении поступательного движения твёрдого тела.
Используя метод Пуансо для каждой материальной точки механической системы, приведём произвольно направленные в пространстве активные силы , реакции внешних связей и силы инерции Фi к центру масс механической системы (рис. 5.36).
Рис. 5.36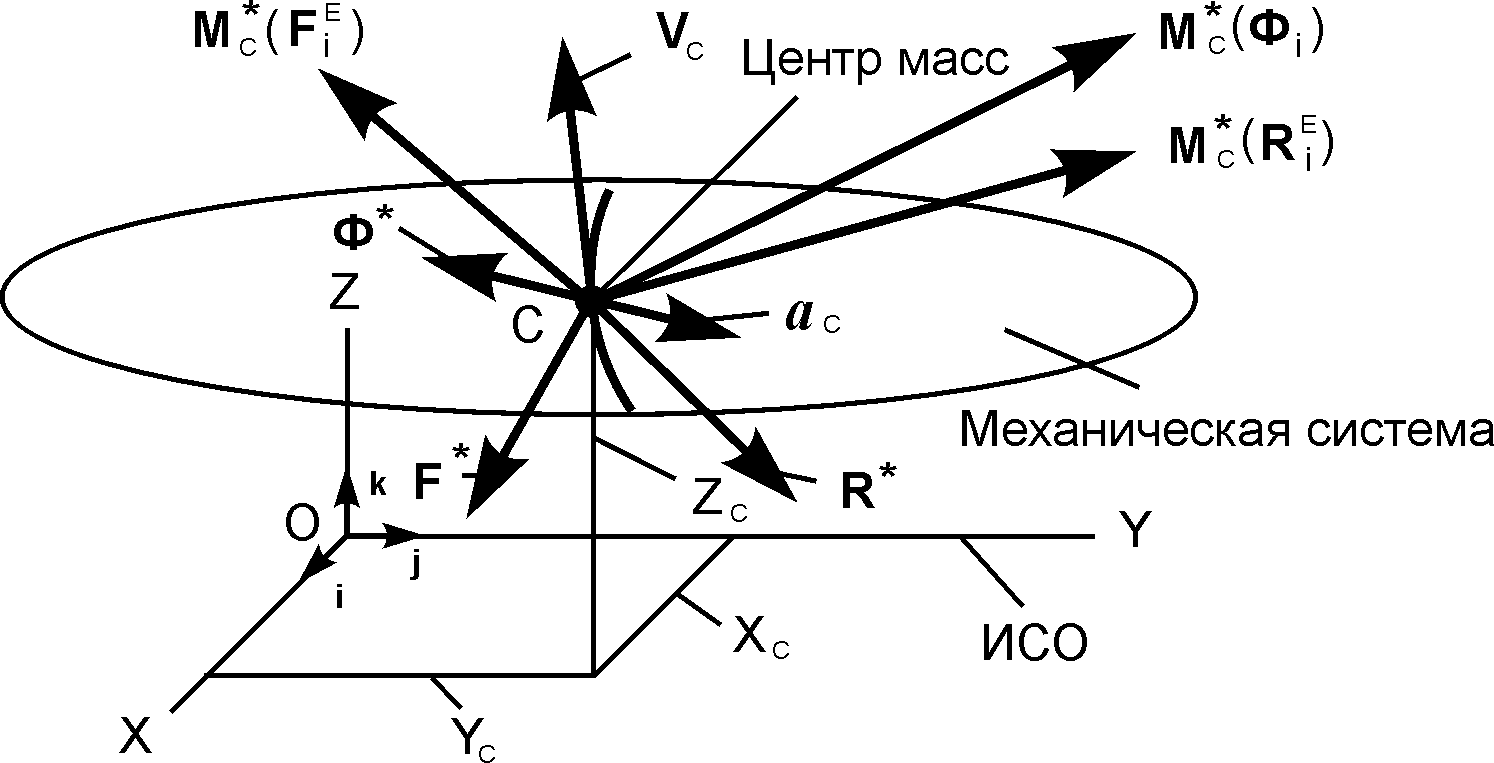
Необходимо отметить, что метод Пуансо справедлив для любой произвольной точки, но, как правило, в инженерной практике за такую точку принимают центр масс твёрдого тела или механической системы.
Согласно
методу Пуансо система активных сил
,
реакций
внешних
связей и сил инерции Фi
эквивалентна системе сил (F*,
R*,
Φ*)
и системе присоединённых пар сил с
векторными моментами
![]() ,
,
![]() ,
,
![]() (Фi),
где
= Σ
– главный момент активных сил относительно
центра масс;
(Фi),
где
= Σ
– главный момент активных сил относительно
центра масс;
![]() = Σ
= Σ![]() – главный момент реакций внешних связей
относительно центра масс;
– главный момент реакций внешних связей
относительно центра масс;
![]() (Фi)
= Σ
(Фi)
= Σ![]() (Фi)
– главный момент сил инерции относительно
центра масс.
(Фi)
– главный момент сил инерции относительно
центра масс.
С использованием условных обозначений: F*, R*, Φ*, , , (Фi) принцип Даламбера преобразуется в совокупность двух векторных выражений:
F* + R*+ Φ*= 0;
+ + (Фi) = 0.
В любой момент времени для движущейся неизменяемой механической системы геометрические суммы главных векторов и главных моментов активных сил, реакций внешних связей и сил инерции относительно произвольного центра (как правило, относительно центра масс) равны нулю.
Спроецируем последние векторные равенства на координатные оси системы отсчёта OXYZ и получим шесть уравнений, выражающих принцип Даламбера в скалярной форме:
![]() +
+
![]() +
+
![]() = 0;
= 0;
![]() +
+
![]() +
+
![]() = 0;
= 0;
![]() +
+
![]() +
+
![]() = 0;
= 0;
![]() =
0;
=
0;
![]() =
0;
=
0;
![]() =
0,
=
0,
где
,
,
– проекции главного вектора активных
сил на координатные оси;
,
,
– проекции главного вектора реакций
внешних связей на координатные оси;
,
,
– проекции главного вектора сил инерции
на координатные оси;
![]() ,
,
![]() ,
,
![]() – проекции главного момента активных
сил на координатные оси;
– проекции главного момента активных
сил на координатные оси;
![]() ,
,
![]() ,
,
![]() – проекции главного момента реакций
внешних связей на координатные оси;
– проекции главного момента реакций
внешних связей на координатные оси;
![]() ,
,
![]() ,
,
![]() – проекции главного момента сил инерции
на координатные оси.
– проекции главного момента сил инерции
на координатные оси.
В любой момент времени для движущейся неизменяемой механической системы суммы проекций главных векторов активных сил, реакций внешних связей и сил инерции, а также суммы проекций главных моментов активных сил, реакций внешних связей и сил инерции относительно произвольного центра на координатные оси инерциальной системы отсчёта равны нулю.
Как правило, в инженерной практике силы не приводят в одну точку и, следовательно, такими понятиями, как главные векторы сил и главные моменты сил относительно произвольной точки не пользуются, а применяют силы, приложенные в различных точках механической системы. В этом случае принцип Даламбера выражается следующими уравнениями:
Σ
+
Σ
+
Σ![]() = 0;
= 0;
Σ
+
Σ
+
Σ![]() = 0;
= 0;
Σ
+
Σ
+
Σ![]() = 0;
= 0;
Σ![]() + Σ
+ Σ![]() + Σ
+ Σ![]() = 0;
= 0;
Σ![]() + Σ
+ Σ![]() + Σ
+ Σ![]() =
0;
=
0;
Σ![]() + Σ
+ Σ![]() + Σ
+ Σ![]() =
0,
=
0,
где Σ , Σ , Σ – суммы проекций активных сил на координатные оси; Σ , Σ , Σ – суммы проекций реакций внешних связей на координатные оси; Σ , Σ , Σ – суммы проекций сил инерции на координатные оси; Σ , Σ , Σ – суммы моментов активных сил относительно координатных осей; Σ , Σ , Σ – суммы моментов реакций внешних связей относительно координатных осей; Σ , Σ , Σ – суммы моментов сил инерции относительно координатных осей.
В любой момент времени для движущейся неизменяемой механической системы суммы проекций активных сил, реакций внешних связей и сил инерции на координатные оси, а также суммы моментов активных сил, реакций внешних связей и сил инерции относительно координатных осей равны нулю.
Последние математические выражения применяются для механических систем, расположенных в трёхмерном пространстве. Для плоских систем используют двумерное пространство. В таком пространстве принцип Даламбера выражается следующими уравнениями:
Σ + Σ + Σ = 0;
Σ + Σ + Σ = 0;
Σ![]() )
+ Σ
)
+ Σ![]() + Σ
+ Σ![]() = 0,
= 0,
где Σ ), Σ , Σ – суммы моментов соответственно активных сил, реакций внешних связей и сил инерции относительно произвольной точки А.
В любой момент времени для движущейся неизменяемой механической системы суммы проекций активных сил, реакций внешних связей и сил инерции на координатные оси, а также сумма моментов активных сил, реакций внешних связей и сил инерции относительно произвольной точки равны нулю.
В инженерной практике, как правило, принцип Даламбера применяют для определения реакций внешних связей, наложенных на механическую систему.