

5.5. Теорема об изменении кинетической энергии
5.5.1. Работа силы на перемещении точки её приложения
Р
Рис. 5.21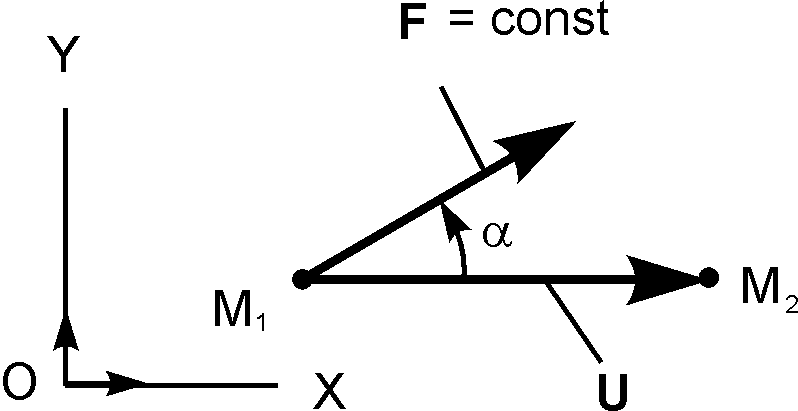
Работой A(F) постоянной силы на прямолинейном перемещении точки её приложения называется скалярное произведение вектора силы F на вектор U перемещения её точки приложения.
A(F) = F·U = F·U·cos(F, U) = F·U·cos(α),
где F – модуль силы F; U – модуль вектора U перемещения точки приложения силы F; α – угол, составленный направлениями векторов F и U.
Единица измерения работы [Н·м] = [Дж].
Согласно последнему равенству работа постоянной силы F на перемещении U точки её приложения равна произведению трёх сомножителей: модуля силы на модуль вектора перемещения точки приложения силы и на косинус угла, составленного направлениями векторов F и U.
В
Рис. 5.22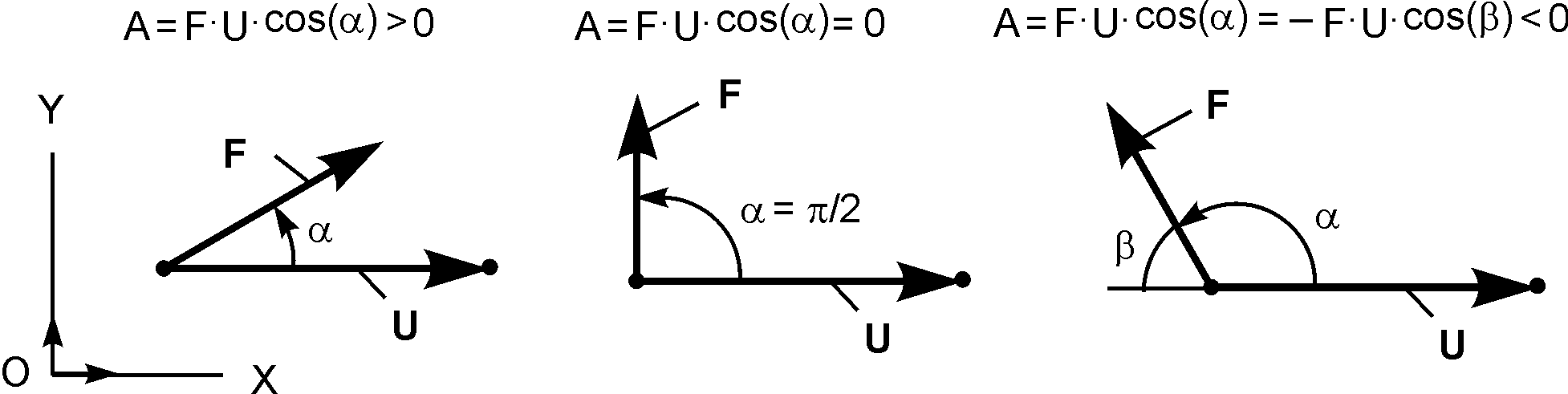
Анализ рис. 5.20 позволяет сделать следующие выводы:
1) если векторы F и U направлены в одну полуплоскость, то A(F) > 0;
2) если векторы F и U направлены в разные полуплоскости, то A(F) < 0;
3) если векторы F и U взаимно перпендикулярны, то A(F) = 0.
К
Рис. 5.23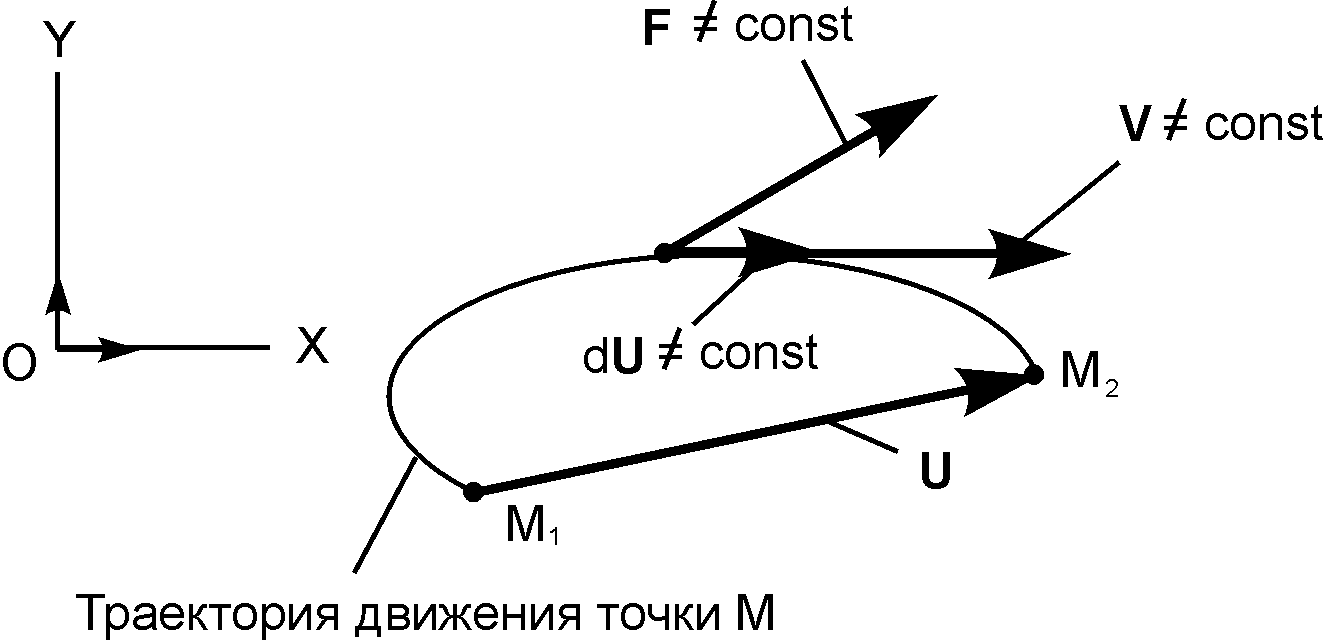
В этом случае используют понятие «элементарная работа силы».
Элементарная работа силы – скалярная мера действия силы, равная скалярному произведению силы на элементарное перемещение точки её приложения.
Рассмотренное понятие базируется на другом понятии – «элементарное перемещение точки».
Элементарное перемещение точки – перемещение точки из данного положения в положение, бесконечно близкое к нему.
Это перемещение изображается вектором, начало и конец которого совпадают соответственно с положениями точки в начале и конце перемещения. Элементарное перемещение dU направляется по касательной к траектории движения в данной точке. Так как вектор dU и вектор V скорости точки имеют одинаковое направление, то равенство для определения элементарной работы δA(F) имеет вид
δA(F) = F·dU = F·dU·cos(F, dU).
Работа переменной силы F на конечном перемещении U точки её приложения по произвольной траектории равна криволинейному интегралу, взятому вдоль кривой от точки М1 до точки М2 от элементарной работы δA.
А(F) = ∫F·dU = ∫F·dU·cos(F, dU).
Работа силы на конечном перемещении точки её приложения – величина, равная криволинейному интегралу от элементарной работы силы, действующей на данную материальную точку, взятому вдоль дуги кривой, описанной точкой при этом перемещении.
Если сила последовательно действует на разные точки механической системы (тела), то её работа при конечном перемещении системы определяется как предел суммы соответствующих элементарных работ.
Выражение работы переменной силы на конечном перемещении точки её приложения по криволинейной траектории через проекции FOX, FOY, FOZ силы F и проекции dX, dY, dZ вектора dU элементарного перемещения на оси декартовой системы отсчёта имеет вид
A(F) = ∫(FOX·dX + FOY·dY + FOZ·dZ).
Р
Рис. 5.24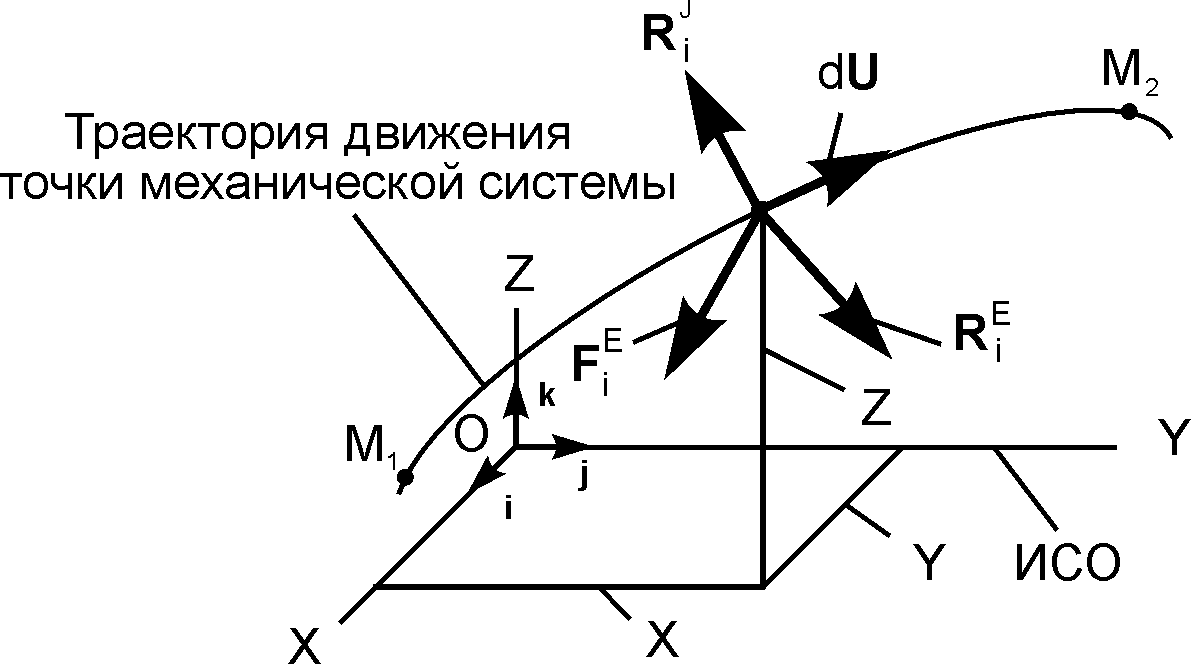
Как известно, точки механической системы осуществляют движение под действием активных сил , реакций внешних связей и внутренних сил . В этом случае элементарная работа δAS внешних сил ( , ) и внутренних сил , приложенных к точке, будет равна
δAS = ( + + )·dU =
=
![]() ·dU·cos(
,
dU)
+
·dU·cos(
,
dU)
+
![]() ·dU·cos(
,
dU)
+
·dU·cos(
,
dU)
+
![]() ·dU·cos(
,
dU).
·dU·cos(
,
dU).
О
Рис. 5.25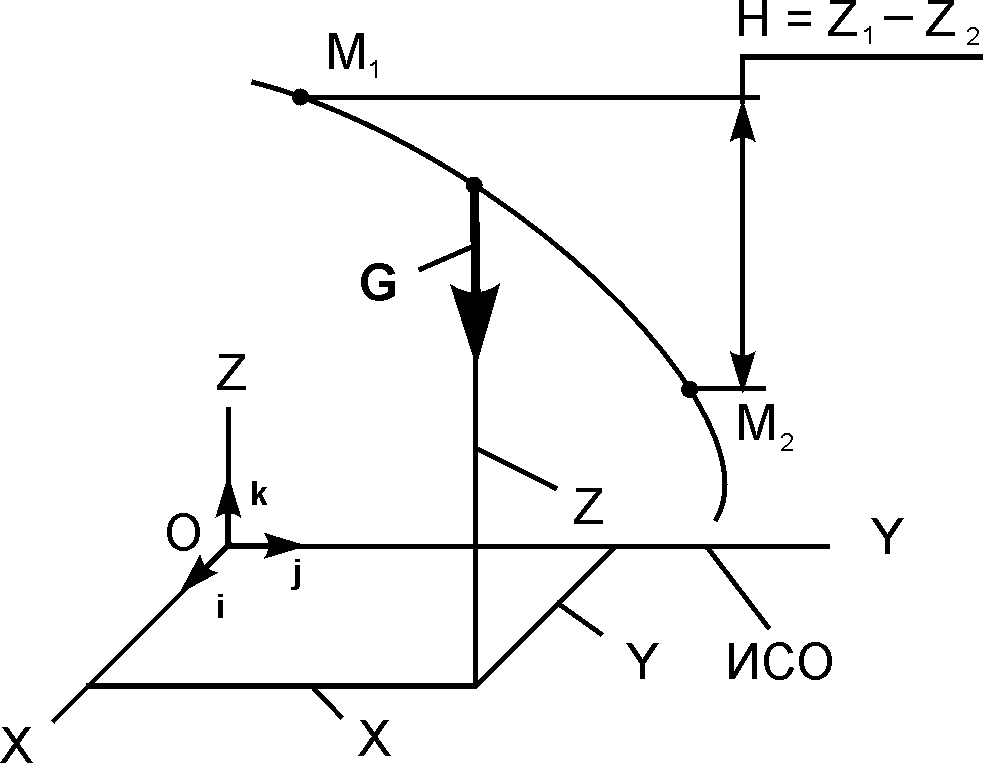
Работу A(G) силы тяжести G определяют по формуле
A(G) = ± G·H,
где G – модуль силы тяжести (вес); Н – изменение высоты точки при её перемещении из положения М1 в положение М2.
Знак (+) соответствует перемещению точки вниз, а знак (–) соответствует перемещению точки вверх.
Таким образом, работа силы тяжести равна взятому со знаком (+) или (–) произведению модуля силы тяжести на вертикальное перемещение точки её приложения.
Работа силы тяжести не зависит от вида траектории, по которой перемещается точка её приложения, а зависит лишь от расстояния между горизонтальными плоскостями, проходящими через начальное и конечное положения точки.
В данном учебно-методическом пособии рассматриваются только неизменяемые механические системы. Для таких систем элементарная работа δAS( ) внутренних сил, определяемая как сумма элементарных работ внутренних сил, действующих на точки, равна нулю.
δAS( ) = Σ ·dU·cos( , dU) = 0.
Исходя из этого, элементарную работу δAS при перемещении неизменяемой механической системы определяют по формулам:
δAS = Σ( + )·dU;
δAS = Σ ·dU·cos( , dU) + Σ ·dU·cos( , dU).
В процессе движения механической системы её тела осуществляют три вида движений: поступательное, вращательное, плоскопараллельное.
При поступательном движении твёрдого тела, рассматриваемого как неизменяемая механическая система, элементарная работа δАS внешних сил, приложенных к нему, равна
δAS = Σ ·dU·cos( , dU) + Σ ·dU·cos( , dU).
При вращательном движении тела относительно оси OZ имеем
δAS = ΣMOZ( )·δφ + ΣMOZ( )·δφ,
где ΣMOZ( ), ΣMOZ( ) – соответственно моменты активных сил и реакций внешних связей относительно оси OZ вращения тела; δφ – элементарный угол поворота тела (приращение угла поворота тела).
Так как плоскопараллельное движение твёрдого тела есть сумма поступательного движения со скоростью полюса (как правило, за полюс принимают центр масс твёрдого тела) и вращательного движения с угловой скоростью относительно оси, проходящей через полюс, то элементарную работу δAS определяют по формуле
δAS = Σ ·dUС·cos( , dUС) + Σ ·dUС·cos( , dUС) +
+
ΣMCZ(
)·δφ
+ΣMCZ(![]() )·δφ,
)·δφ,
где ΣMCZ( ), ΣMCZ( ) – соответственно суммы моментов активных сил и реакций внешних связей относительно оси CZ , проходящей через центр масс тела; dUC – элементарное перемещение центра масс тела.
В инженерных дисциплинах широко используется понятие «мощность силы». Определим это понятие.
Мощность силы – величина, равная скалярному произведению силы на скорость точки её приложения.
Мощность обозначают символом N и находят по формуле
N = F·V = F·V·cos(F, V).
Так как мощность силы характеризует быстроту выполнения работы, то величину мощности можно находить по формуле
N = δA(F)/dt,
где δA(F) – элементарная работа силы; dt – промежуток времени, за который совершена элементарная работа.
Единица измерения мощности [Дж/с] = [Вт], (Bатт).
Для поступательного движения твёрдого тела мощность определяют по формуле
N
= Σ
·VС·cos(![]() ,
VС)
+ Σ
·VС·cos(
,
VС),
,
VС)
+ Σ
·VС·cos(
,
VС),
где VС = dUС/dt – скорость центра масс.
При вращательном движении твёрдого тела имеем
N = ΣMOZ( )· + ΣMOZ( )· ,
где – угловая скорость вращения тела.
Вычисление суммы работ сил осуществляют по следующему алгоритму.
Изобржают на рисунке силы, приложенные к материальной точке либо к системе материальных точек.
Изображают элементарные перемещения точек системы.
Вычисляют элементарную работу сил, т. е. сумму работ всех сил на элементарных перемещениях точек системы.
Вычисляют искомую сумму работ сил на конечных перемещениях как сумму определённых интегралов, взятых в соответствующих пределах от элементарных работ. При наличии сил тяжести вычисляют работу этих сил на конечных перемещениях по формуле A(Gi) = ±Gi·HСi, где HСi – высота, на которую перемещается центр Сi масс i-го тела.