

Следствия из теоремы о движении центра масс
1. Если геометрическая сумма активных сил и реакций внешних связей постоянно равна нулю (Σ + Σ = 0), то центр масс механической системы находится в покое или движется равномерно и прямолинейно.
Таким образом, если Σ + Σ = 0, то aС = 0, т. е. VС = const. Если начальная скорость VС0 центра масс равна нулю, то центр масс находится в покое. Если же VС0 ≠ 0, то центр масс движется прямолинейно и равномерно с этой скоростью.
2. Если суммы проекций активных сил и реакций внешних связей на какую-либо ось остаются всё время равными нулю, то проекция центра масс механической системы на эту ось неподвижна или движется равномерно.
Действительно,
если Σ
+
Σ
=
0, то
=
0, т. е.
=
const.
Если при этом в начальный момент времени
![]() =
0, то
=
0, ХС
= const,
т. е. координата ХС
центра масс остается постоянной.
=
0, то
=
0, ХС
= const,
т. е. координата ХС
центра масс остается постоянной.
Следствия из теоремы о движении центра масс выражают закон сохранения движения центра масс механической системы.
С помощью теоремы о движении центра масс механической системы решают задачи, в которых рассматривается только поступательная часть движения тел, образующих механическую систему.
Рекомендуется следующий алгоритм решения задач.
Выбирается система отсчёта.
К механической системе прикладываются все активные силы и реакции внешних связей.
3. Записывается теорема о движении центра масс (m·ac = Σ + Σ = FE + RE) в проекциях на оси системы отсчёта:
m· = Σ + Σ ;
m· = Σ + Σ ;
m· = Σ + Σ .
Вычисляются суммы проекций активных сил и реакций внешних связей на оси системы отсчёта и подставляются в последние выражения.
В зависимости от условий решается прямая либо обратная задача динамики.
Поскольку для заочной формы обучения курсовых заданий на использование теоремы о движении центра масс механической системы не предусмотрено, то примеры решения таких задач в данном учебно-методическом пособии не приведены.
Вопросы и задания для самоконтроля
Сформулировать теорему о движении центра масс механической системы.
Записать векторную формулу, выражающую теорему о движении центра масс механической системы.
Записать дифференциальные уравнения движения центра масс механической системы в декартовой системе отсчёта.
Сформулировать первое следствие из теоремы о движении центра масс механической системы.
Сформулировать второе следствие из теоремы о движении центра масс механической системы.
5.2. Теоремы об изменении количества движения материальной точки и количества движения механической системы
5.2.1. Теорема об изменении количества движения
материальной точки
В этой теореме используются понятия «количество движения» и «импульс силы». Введём эти понятия.
Количество движения материальной точки – векторная мера механического движения, равная произведению массы точки на её скорость.
Р
Рис. 5.2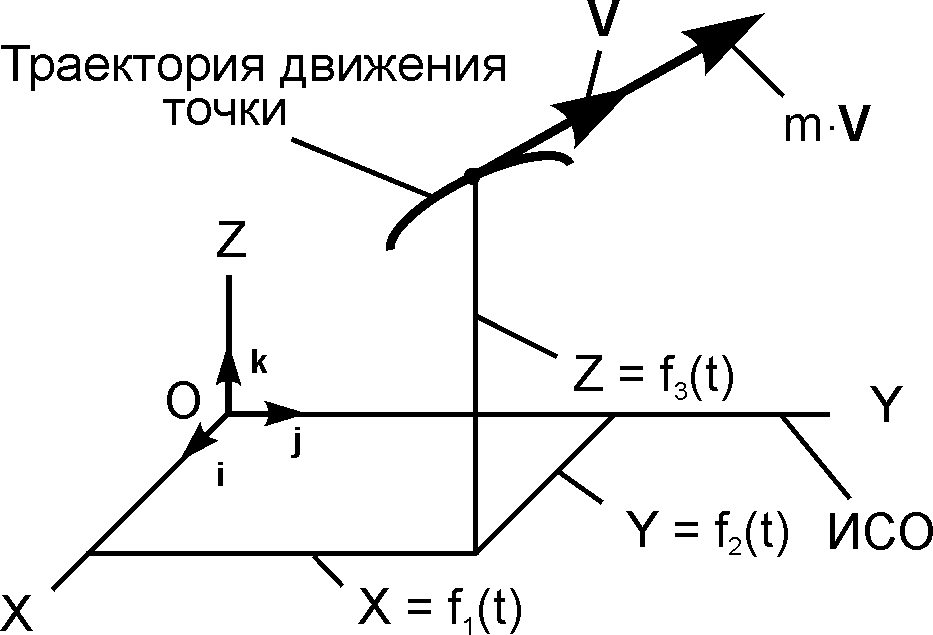
Согласно определению вектор количества движения m·V имеет такое же направление, как и вектор скорости V точки. Количество движения m·V является векторной мерой механического движения. Количество движения имеет размерность [кг·м/с].
Р
Рис. 5.3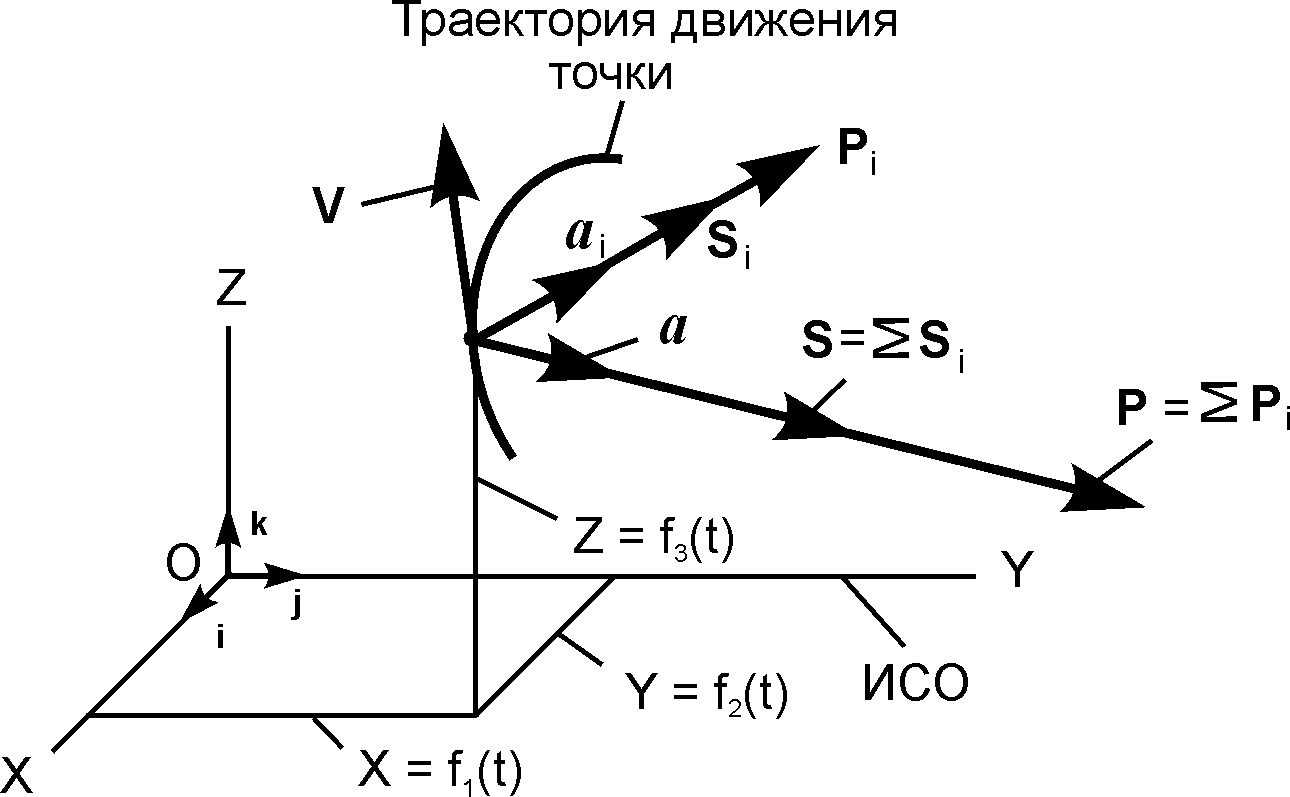
В теоретической механике используют понятие «элементарный импульс силы».
Элементарный импульс силы – векторная мера действия силы, равная произведению силы на элементарный промежуток времени её действия.
Si = Pi ·Δt,
где Si – элементарный импульс силы; Pi – сила; Δt – элементарный промежуток времени.
Равнодействующая системы сил, действующих на точку, определяется по формуле P = ΣPi.
Если постоянная по модулю и направлению сила Pi действует на точку в течение промежутка времени Δt = t2 – t1, то элементарным импульсом силы за конечный промежуток времени является вектор
Si = Pi·Δt = Pi·(t2 – t1).
Направление этого вектора совпадает с направлением силы, а его модуль равен произведению модуля силы на время её действия:
Si = Pi·(t2 – t1).
В общем случае импульс Si силы Pi за промежуток времени Δt = (t2 – t1) определяется векторным интегралом от вектора Pi по скалярному аргументу t:
Si
=
![]() .
.
Импульс силы за конечный промежуток времени – величина, равная определённому интегралу от элементарного импульса силы, где пределами интеграла являются моменты начала и конца данного промежутка времени.
Импульс равнодействующей Р нескольких сил Pi за некоторый промежуток времени равен геометрической сумме импульсов соответствующих сил за этот же промежуток времени.
S = ΣSi.
В проекциях на координатные оси имеем:
SОХ = ΣSiОХ; SOY = ΣSiOY; SOZ = ΣSiOZ.
Проекция импульса равнодействующей на ось системы отсчета равна алгебраической сумме проекций импульсов составляющих сил на ту же ось.
Теорема об изменении количества движения материальной точки в дифференциальной форме выражается формулой
d(m·V)/dt = P.
Производная по времени от количества движения материальной точки геометрически равна равнодействующей сил, приложенных к этой точке.
Теорема об изменении количества движения материальной точки в интегральной (конечной) форме приобретает вид
m·V2 – m·V1 = ΣSi,
где V2, V1 – скорости точки соответственно в конечный и начальный моменты времени.
Изменение количества движения материальной точки за некоторый промежуток времени равно геометрической сумме импульсов сил, приложенных к точке за тот же промежуток времени.
Эту теорему называют также теоремой импульсов.
Последнему векторному равенству соответствуют три уравнения в проекциях на оси системы отсчёта OXYZ:
m·V2ОХ – m·V1ОХ = ΣSiОХ;
m·V2OY – m·V1OY = ΣSiOY;
m·V2OZ – m·V1OZ = ΣSiOZ,
где V2ОХ, V2OY, V2OZ, V1ОХ, V1OY, V1OZ – проекции конечной и начальной скоростей точки на координатные оси системы отсчёта
Изменение проекции количества движения материальной точки на координатную ось за некоторый промежуток времени равно сумме проекций на ту же ось импульсов, приложенных к точке сил за тот же промежуток времени.
Большинство практических задач решается по уравнениям в проекциях на оси координат.