

Варианты 26 – 30 (рис. 1.14)
И
Рис. 1.14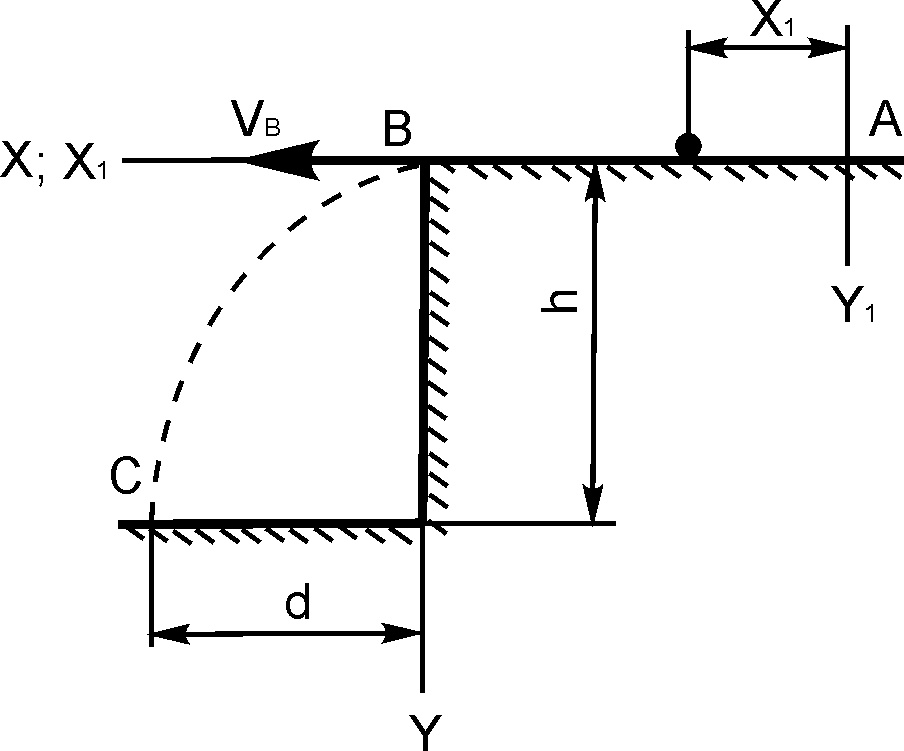
При решении задачи принять тело за материальную точку; сопротивление воздуха не учитывать.
Вариант 26. Дано: VA = 7 м/с; f = 0,2; l = 8 м; h = 20 м. Определить VC и d.
Вариант 27. Дано: VA = 4 м/с; f = 0,1; τ = 2 c; d = 2 м. Определить VB и h.
Вариант 28. Дано: VB = 3 м/с; f = 0,3; l = 3 м; h = 5 м. Определить VA и Т.
Вариант 29. Дано: VA = 3 м/с; VB = 1 м/с; l = 2,5 м; h = 20 м. Определить f и d.
Вариант 30. Дано: f = 0,25; l = 4 м; d = 3 м; h = 5 м. Определить VA и τ.
1.13. Пример выполнения курсового задания д 1
В общем случае система сил, действующая на материальную точку, может быть постоянной или зависеть от времени t, положения в пространстве, скорости и т. д. В связи с этим интегрирование дифференциальных уравнений движения точки имеет свою специфику. В курсовом задании Д 1 система сил, действующая на точку, постоянна. Рассмотрим пример выполнения этого задания.
Условие задания.
Тело движется из точки А по участку АВ (длиной l) наклонной плоскости, составляющей угол α с горизонтом. Его начальная скорость VA. Коэффициент трения скольжения равен f. Через τ секунд тело в точке В со скоростью VB покидает наклонную плоскость и падает на горизонтальную плоскость в точку С со скоростью VC; при этом оно находится в воздухе Т секунд (рис. 1.15).
При решении задачи принять тело за материальную точку и не учитывать сопротивление воздуха.
Д
Рис. 1.15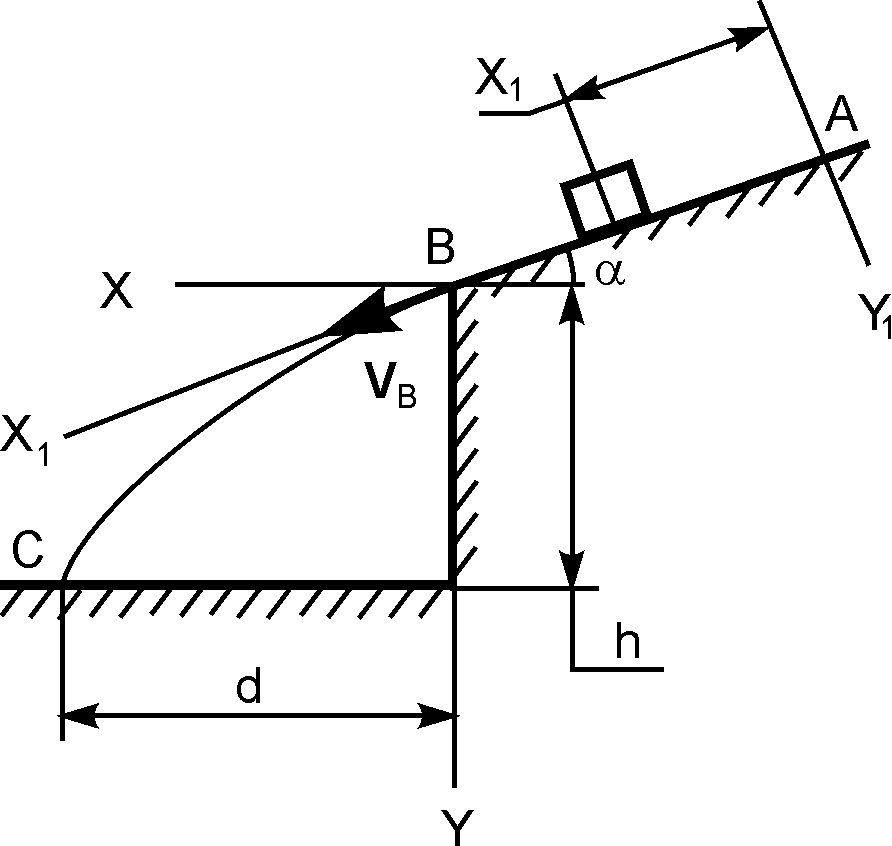
Решение.
1
Рис. 1.16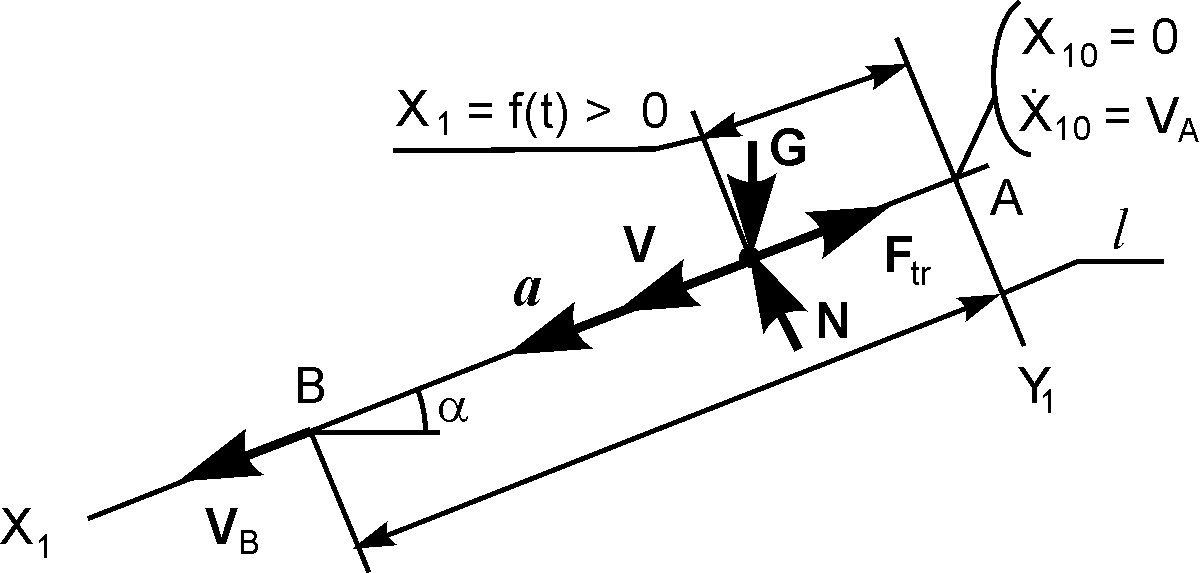
Такое допущение обосновано тем, что тело совершает поступательное движение и, следовательно, уравнения его движения такие же, как и у точки.
2. Изобразим точку в системе отсчёта АX1Y1 в произвольный момент времени t. При этом её координата Х1 = f(t) > 0 и точка движется в сторону возрастания этой координаты ускоренно. Следовательно, ускорение a имеет такое же направление, как и скорость V.
3.
Согласно условию задачи при t0
= 0 начальная координата Х10
= Х1А
= 0 и проекция начальной скорости
![]() =
VA.
=
VA.
4. К точке приложим активную силу G – силу тяжести. Так как опорная поверхность точки шероховатая, то имеем две реакции: N – нормальная реакция; Ftr – сила трения скольжения. Силу Ftr направляют в сторону, противоположную направлению скорости V. Из курса статики известно, что модули силы трения и нормальной реакции связывает соотношение Ftr = f·N.
5. Запишем основное уравнение динамики точки.
m·a = ΣFiЕ + ΣRiЕ = G + N + Ftr.
Спроецировав это векторное выражение на координатные оси системы отсчёта АX1Y1, получим дифференциальные уравнения движения точки:
m·![]() = G·sin(α)
– Ftr;
(1)
= G·sin(α)
– Ftr;
(1)
m·![]() =
G·cos(α)
– N, (2)
=
G·cos(α)
– N, (2)
где , – проекции ускорения a на координатные оси.
Поскольку вектор a на ось AY1 не проецируется, то из уравнения (2) имеем N = G·cos(α) = m·g·cos(α). Отсюда имеем
Ftr = f·N = f·m·g·cos(α).
Анализируя последнее равенство, сделаем вывод о том, что реакции N и Ftr не зависят от того, в каком кинематическом состоянии (покоя или движения) находится точка.
С учетом изложенного уравнение (1) приводится к виду
m· = G·sin(α) – Ftr = G·sin(α) – f·N·cos(α) =
= m·g·sin(α) – f·m·g·cos(α) = m·g·(sin(α) – f·cos(α)). (1I)
Упростим последнее выражение.
= g·(sin(α) – f·cos(α)). (1II)
6. Дважды проинтегрируем последнее уравнение.
![]() =
g·(sin(α)
– f·cos(α))·t
+ C1;
=
g·(sin(α)
– f·cos(α))·t
+ C1;
X1 = g·(sin(α) – f·cos(α))·t2/2 + C1·t + C2,
где С1, С2 – постоянные интегрирования.
7. Определим постоянные С1, С2 подстановкой в последние уравнения начальных условий движения. При t0 = 0 имеем:
= VA = g·(sin(α) – f·cos(α))·t0 + C1;
X10= Х1A = 0 = g·(sin(α) – f·cos(α))·(t0)2/2 + C1·t0 + C2.
Отсюда С1 = VA; С2 = 0. Окончательно имеем:
= g·(sin(α) – f·cos(α))·t + VA;
X1 = g·(sin(α) – f·cos(α))·t2/2 + VA·t,
где X1, – соответственно текущие координата точки и проекция её скорости на координатную ось АХ1.
Последние выражения справедливы для любого значения времени, пока точка движется по участку АВ. В момент времени τ движущееся тело находится в точке В участка АВ. Исходя из этого, получим систему двух уравнений.
![]() =
VB
= g·(sin(α) – f·cos(α))·τ
+ VA;
=
VB
= g·(sin(α) – f·cos(α))·τ
+ VA;
Х1(τ) = l = g·(sin(α) – f·cos(α))·τ2/2 + VA·τ.
Эта система уравнений содержит неизвестные τ и VB. Поскольку число уравнений равно числу неизвестных величин, то такую систему уравнений решают стандартными приёмами и определяют VB и τ. После определения VB и τ рассматривают движение материальной точки на участке ВС её траектории в системе отсчёта ВХY (см. рис. 1.15).
Если последнюю систему уравнений решить нельзя (число неизвестных превышает число уравнений равновесия), то так же переходят к рассмотрению движения точки на участке ВС в системе отсчёта ВXY.
8. Рассмотрим движение точки на участке ВС в заданной системе отсчёта ВXY.
9
Рис. 1.17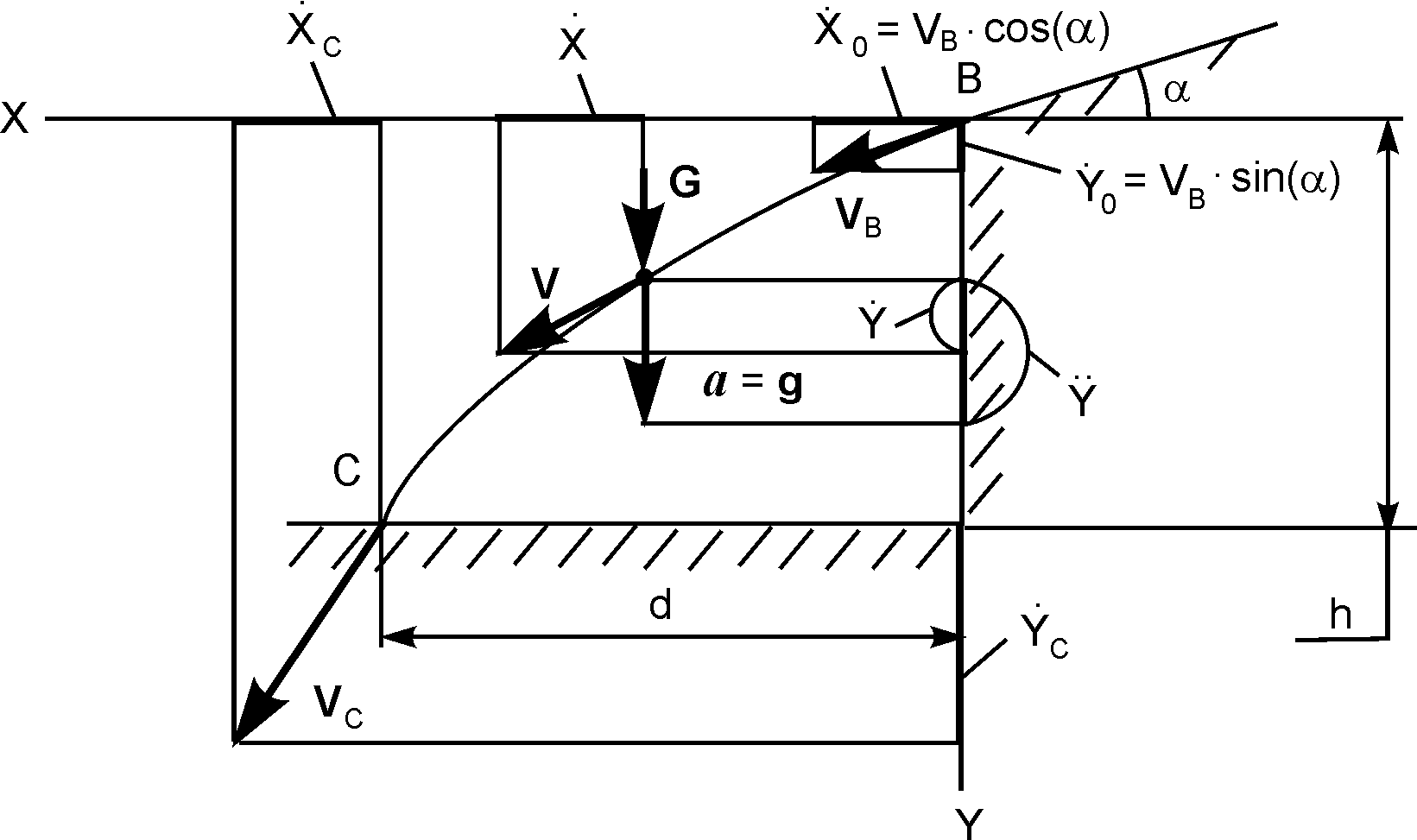
10.
Определим начальные условия движения
точки на участке ВС. Согласно рис. 1.17
имеем: Х0
= 0;
![]() =
VB·cos(α);
Y0
= 0;
=
VB·sin(α).
=
VB·cos(α);
Y0
= 0;
=
VB·sin(α).
11. На точку действует только одна активная сила G – сила тяжести. Реакций связей нет, поскольку сопротивление воздуха не учитывается.
12. Основное уравнение динамики для точки имеет вид
m·a = ΣFiE + ΣRiE = G.
Запишем дифференциальные уравнения движения точки.
m· = Σ + Σ = 0; (3)
m· = Σ + Σ = G = m·g. (4)
13.
Проинтегрируем последние уравнения.
Так как масса точки m
≠ 0, то из уравнения (3) имеем
= 0. Отсюда следует, что
![]() =
C3
= const,
где
– проекция скорости на координатную
ось ВХ; С3
– постоянная интегрирования. Определим
С3
по начальным условиям движения. При t0
= 0 имеем
=
VB·cos(α)
= C3.
Так как
= const,
то окончательно получим выражение
= VB·cos(α).
Другими словами, в любой момент времени
проекция скорости на координатную ось
ВХ постоянна, т. е. не зависит от времени.
=
C3
= const,
где
– проекция скорости на координатную
ось ВХ; С3
– постоянная интегрирования. Определим
С3
по начальным условиям движения. При t0
= 0 имеем
=
VB·cos(α)
= C3.
Так как
= const,
то окончательно получим выражение
= VB·cos(α).
Другими словами, в любой момент времени
проекция скорости на координатную ось
ВХ постоянна, т. е. не зависит от времени.
Проинтегрировав последнее выражение, получим
X = VB·cos(α)·t + C4,
где С4 – постоянная интегрирования.
Определим эту постоянную по начальным условиям движения. При t0 = 0 имеем X0 = 0 = VB·cos(α)·t0 + C4. Отсюда получим С4 = 0. Окончательно текущее значение координаты X точки находят по формуле
X = VB·cos(α)·t.
Дифференциальное уравнение (4) движения точки приведем к виду = g. Проинтегрируем это выражение и получим
![]() =
g·t
+ C5,
=
g·t
+ C5,
где – текущее значение проекции скорости на координатную ось BY; С5 – постоянная интегрирования.
По начальным условиям движения имеем
= VB·sin(α) = g·t0 + C5.
Отсюда С5 = VB·sin(α). Тогда = g·t + VB·sin(α).
Проведём интегрирование последнего выражения.
Y = g·t2/2 + VB·sin(α)·t + C6.
Определим постоянную интегрирования С6. При t0 = 0 имеем
Y0 = 0 = g·(t0)2/2 + VB·sin(α)·t0 + C6.
Тогда С6 = 0.
Текущее значение координаты y находят по формуле
Y = g·t2/2 + VB·sin(α)·t.
Таким образом, получаем выражения для определения текущих значений координат X, Y и проекций , скорости точки при её движении по траектории ВС. В момент времени Т, когда тело находится в точке С траектории его движения (см. рис. 1.17), эти выражения приобретают следующий вид:
![]() =
VB·cos(α);
=
VB·cos(α);
![]() = g·Т
+ VB·sin(α);
= g·Т
+ VB·sin(α);
d = VB·cos(α)·T; h = g·T2/2 + VB·sin(α)·T,
где , – проекции скорости VC на координатные оси; d, h – координаты точки С в системе отсчёта ВXY.
По
условию задачи требуется определить
модуль скорости тела в точке С траектории
его движения. Для этого используется
формула
![]() .
.
Таким образом, для определения неизвестных величин необходимо совместно решить следующую систему уравнений:
VB = g·(sin(α) – f·cos(α))·τ + VA;
l = g·(sin(α) – f·cos(α))·τ2/2 + VA τ;
= VB·cos(α);
= g·Т + VB·sin(α);
d = VB·cos(α)·T;
h = g·T2/2 + VB·sin(α)·T;
.
В этой системе уравнений неизвестными величинами являются: VB, τ, d, T, , , VC.
Таким образом, имеем семь уравнений, содержащих семь неизвестных.
Для координации вектора VC скорости тела в точке С пространства рекомендуется определить величину угла β, составленного направлением этой скорости с положительным направлением отсчета координаты Х по формулам:
cos(VC, i) = /VC; β = arcos( /VC).
Результаты проведённых расчётов сводят в таблицу.