


2.11. Геометро-кинематические условия существования эвольвентного зацепления
1. Постоянство передаточного отношения.
|
|
|
|
rw2 |
|
rb2 |
|
|
i |
|
q |
|
|
. |
(3.95) |
||
|
|
|
||||||
12 |
|
|
rw1 |
|
rb1 |
|
||
|
|
|
|
|
|
|||
где rw1, rw2, rb1, rb2 – радиусы начальных и основных окружностей. Постоянство передаточного отношения обеспечивается эвольвентным про-
филем зубчатых колес.
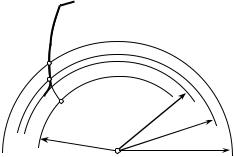
2. Угол перекрытия.
Полный коэффициент перекрытия является суммой торцового ко-
эффициента перекрытия и осевого коэффициента перекрытия ,
|
|
= + . |
|
|
|
(3.96) |
|
Торцовой коэффициент перекрытия |
|
|
g |
|
|||
|
|
|
Линия зацепления |
|
. (3.97) |
||
|
B2 |
|
|
p |
|
||
rа1 |
|
|
|
|
Длина |
активной |
|
|
|
|
|
|
|||
|
|
H1 |
αa2 |
|
|
||
O1 |
|
αw |
O2 |
линии зацепления g – |
|||
|
|
||||||
αw αa1 |
P |
|
|
|
|
участок |
заключен |
|
H2 |
|
pα |
ra2 |
|
между точками Н1 и |
|
|
|
|
|
Н2. |
|
||
|
B1 |
|
|
|
|
Шаг зацепления |
|
|
|
|
|
|
|
||
р – расстояние по
Рис. 3.49 контактной нормали
между двумя контактными точками одноименных главных профилей соседних зубьев:
р =m cos . |
(3.98) |
g H2 H1 H2 P PH1 (H2 B2 PB2 ) (B1H1 B1P)
rb2 tg a2 rb2 tg w rb1tg a1 rb1tg w
mz22 cos (tg a2 tg w ) mz21 cos (tg a1 tg w )
|
|
|
r |
r cos mz cos . |
(3.99) |
||
|
|
|
b |
2 |
|
|
|
|
mcos |
|
|
|
|||
g |
z2 (tg a2 tg w ) z1 (tg a1 tg w ) . |
(3.100) |
|||||
|
|
||||||
2 |
z1 (tg a1 tg w ) z2 (tg a2 tg w ) |
|
|
||||
|
. |
(3.101) |
|||||
|
|||||||
|
|
|
|
2 |
|
||
102

Осевой коэффициент перекрытия . |
|
|
|
||
Для прямозубых зубчатых колес обычно < 1,7. |
|
|
|||
pt |
n |
bw |
bw sin , |
(3.102) |
|
|
|
||||
bw |
px |
px |
mn |
|
|
mn – расчетный или нормальный модуль, |
|||||
|
pn |
bw – ширина венца передачи, |
|
||
n |
рх – осевой шаг |
|
|
||
|
|
3. Равенство шагов. |
|
||
|
|
|
|||
|
|
Обеспечивается |
равенством |
модулей |
|
Рис. 3.51 |
|
зубчатых колес. Шаг зацепления р |
|||
|
у обоих колес одинаковый, если они име- |
||||
|
|
ют равные модули. |
|
|
|
4. Подрезание. |
|
|
|
|
|
|
|
|
Определим условие отсутствия |
||||||||
|
|
|
|
|
|
|
|
|
|
|
Средняя линия |
||||||
|
|
|
|
|
|
|
|
|
|
|
подрезания в прямозубой эвольвент- |
||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
(Делительная прямая) |
ной передаче. |
|||||||
|
|
|
|
|
|
|
|
|
|
ha*m |
|
|
|
В момент, когда на линии зацепле- |
|||
|
|
|
|
|
|
|
|
|
|
|
xm |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
ния РВ1 располагается точка притупле- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
P |
|
|
|
B1 |
|
|
|
||||||
c*m |
|
|
|
|
|
|
α |
ния прямолинейного профиля, на зуб- |
|||||||||
|
|
|
α |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
чатом колесе формируется граничная |
|||||
|
|
|
|
r |
|
|
|
|
|
|
rb |
|
|
|
|
точка L. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Средняя линия смещена относитель- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
но нее на расстояние, называемое сме- |
|
|
|
|
|
|
Рис. 3.52 |
|
|
|
щением и выражаемое в долях модуля: |
|||||||
|
|
|
|
|
|
|
|
|
х m, где х – коэффициент смещения. |
||||||||
Определим радиус кривизны L эвольвенты в граничной точке.
|
|
|
|
|
h*m xm |
|
z |
|
h* x |
|
||
|
L |
B L PB PL r tg a |
m |
|
|
sin |
a |
|
. |
|||
|
||||||||||||
|
1 |
1 |
b |
sin |
|
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
sin |
|
|||
Условие отсутствия подрезания L 0:
z |
2(h* x) |
. |
|
a |
|
||
|
sin2 |
|
|
(3.103)
(3.104)
При отсутствии смещения (х = 0) zmin = 17. Если z < 17, то наименьший коэффициент смещения xmin:
|
* |
|
z sin |
2 |
|
|
x |
h |
|
|
|
. |
(3.105) |
|
|
|||||
min |
a |
|
2 |
|
|
|
|
|
|
|
|
|
103
5. Заострение. Заострение зубьев возникает тогда, когда точка пересечения разноименных теоретических профилей зуба располагается внутри окружности вершин. Обычно принимают толщину зуба по дуге окружности вершин
Sa 0,25m |
(3.106) |
для кинематических передач (т.е. для тех передач, которые не предназначены для передачи больших нагрузок) и
|
Sa 0,4m |
|
(3.106') |
||
для силовых. |
|
|
|
|
|
6. Интерференция. Интерференция |
зубьев будет отсутствовать, если |
||||
|
эвольвентный профиль зуба одного зубчатого |
||||
|
колеса сопрягается только с эвольвентным про- |
||||
pi |
филем зуба другого колеса. Для этого необходи- |
||||
мо, чтобы радиус граничной точки rLi был мень- |
|||||
Li |
|||||
rfi |
ше радиуса rpi нижней точки активного профиля: |
||||
rLi |
|
|
|
||
rbi |
rpi |
r |
r , i = 1, 2 |
(3.107) |
|
|
|
Li |
pi |
|
|
Oi
Рис. 3.53
104

2.12.Качественные характеристики передачи
1.Приведенный радиус кривизны.
Усталостное выкрашивание является основным видом разрушения активной поверхности зубьев закрытых и хорошо смазанных зубчатых передач.
Для предотвращения выкрашивания необходимо, чтобы контактные напряжения на активных поверхностях не превышали допустимых.
По формуле Герца-Беляева для двух контактирующих цилиндров (контакт-
ные напряжения обратно пропорциональны пр . |
|
|
|
||
а) |
б) |
Приведенный радиус кривизны: |
|
||
P |
ρ2 |
1 2 |
. |
(3.121) |
|
пр |
|
||||
|
|
1 |
2 |
|
|
|
ρ1 |
Максимальная |
|
контактная прочность |
|
|
|
|
|||
|
|
достигается максимальной суммой |
коэф- |
||
|
|
фициентов смещения х = х1 + х2. |
|
||
|
Рис. 3.58 |
|
|
|
|
В зубчатой передаче внутреннего зацепления приведенный радиус кри- а) б) визны значительно больше, чем в переда-
че внешнего зацепления:
 ρ2
ρ2
|
пр |
|
1 2 . |
(3.122) |
|
|
|
|
2 |
|
|
ρ1 |
|
|
1 |
|
|
|
|
|
|
|
|
Рис. 3.59
Зацепление Новикова.
Особенность зацепления Новикова – торцовый
коэффициент перекрытия =0, поэтому = , т.е. зацепление работоспособно только в косозубом исполнении. Недостаток зацепления Новикова – чувствительность к точности изготовления, которое
является достаточно сложным.
Рис. 3.60
105
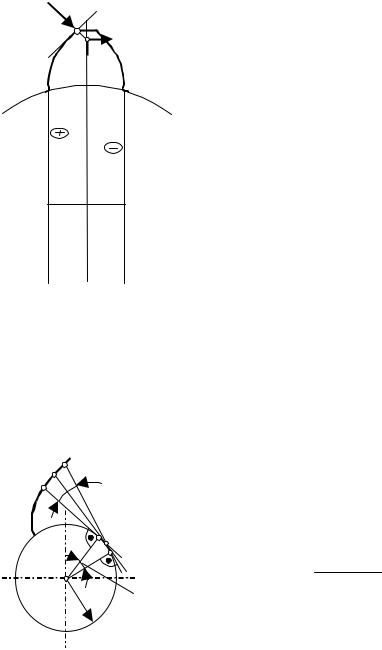
2. Коэффициент, учитывающий форму зуба. Под действием приложен-
ных нагрузок может произойти поломка зубьев. Зубья должны быть рассчитаны на изгибную прочность.
R
P
F

A 
 B
B
σи 
σсж 
σΣ 
R – реакция со стороны сопряженного колеса, Р – окружная сила,
F –радиальная сила, сжимающую зуб.
Сравнивая суммарные напряжения зоны «А» и «В», приходим к выводу, что наиболее опасной является зона «А», т.к. именно в ней наибольшие положительные напряжения.
Максимальное значение нормальных напряжений в опасном сечении зуба обратно пропорционально коэффициенту YF, учитывающему форму зуба. С увеличением этого коэффициента напряжения от изгиба уменьшаются. Коэффициент YF зависит в числе прочего от коэффициента смещения и от того, является ли зубчатое колесо в передаче ведущим или ведомым.
Рис. 3.61
3. Удельное скольжение. Износ зубьев происходит вследствие относительного скольжения их активных поверхностей и наличия абразивных частиц ме-
|
|
|
жду ними.. |
K |
D |
dν |
dsi – перемещение точки контакта по i-му профи- |
|
лю, |
||
C |
|
|
|
|
|
dsi – dsj – абсолютное скольжение профилей. |
|
|
|
В |
Удельное скольжение, отнесенным к профилю зу- |
|
|
ба i-го зубчатого колеса.: |
O |
|
i dsi ds j |
(3.123) |
rb |
d =dν |
dsi |
|
|
|
|
Бесконечно малая дуга ds:
Рис. 3.62 |
ds CD K d , |
|
В результате получим:
dsi кi d i , |
|
|
|
кj zi |
|
|
||||||
|
|
кj |
d |
j |
, |
1 |
. |
(3.124) |
||||
|
|
|||||||||||
1 |
|
|
|
i |
|
кi |
z |
j |
|
|||
|
|
|
|
|
|
|
||||||
i |
кi d i |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||
106