

ГЛАВА 8. ДИНАМИКА МАШИН С ЖЕСТКИМИ ЗВЕНЬЯМИ
8.1. Механические характеристики двигателя
При решении задач динамики машин обычно используют наиболее простые динамические модели двигателей, отражающие зависимости между законами изменения во времени входного параметра двигателя
|
|
q |
(управления) u(t) , обобщенной скорости выходного |
|
u |
Д |
|||
Q |
звена q(t) и обобщенной движущей силы Q(t) (рис. |
|||
|
|
|||
|
|
|
|
|
|
|
|
8.1). Математические соотношения, описывающие |
|
|
|
|
эти зависимости, называются механическими харак- |
|
|
|
|
||
|
Рис. 8.1 |
|
теристиками двигателей. К более сложным моде- |
|
|
|
лям, учитывающим динамику внутренних физиче- |
||
|
|
|
||
|
|
|
ских процессов, происходящих в двигателях, прихо- |
дится обращаться сравнительно редко; в этом курсе такие модели рассматриваться не будут.
С основными разновидностями механических характеристик познакомимся
на примере электродвигателя постоянного тока с независимым возбуждением, |
|||||||||||
|
|
|
|
|
u |
принципиальная схема которого показана на рис. 8.2. |
|||||
|
|
|
|
|
Здесь вращение выходного звена двигателя (ротора) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
происходит за счет взаимодействия тока, возникающего |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
в обмотке ротора, с магнитным полем, создаваемым об- |
|
|
|
|
|
|
|
|
|
|
|
моткой возбуждения. При вращении ротора в его об- |
|
|
|
|
|
|
|
|
|
|
|
мотке в соответствии с законом электромагнитной ин- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дукции возникает обратная электродвижущая сила Е |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
(ЭДС), пропорциональная величине магнитного потока |
||
q |
|
|
|
|
|
|
|
|
|
обмотки возбуждения Ф и угловой скорости ротора q : |
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 8.2 |
E kE q , |
|
|
где kE – некоторый коэффициент пропорциональности. В цепи ротора при про-
хождении тока I возникают потери напряжения, связанные с наличием активного сопротивления R и индуктивности L . С учетом потерь уравнение электрической цепи записывается в форме
u E R I L I . |
(8.1) |
С другой стороны, в соответствии с законом Ампера движущий момент Q связан с силой тока I соотношением
Q kM I . |
(8.2) |
Исключая I из (8.1) и (8.2), получаем
200
|
|
R |
|
L |
|
|
|
|
u kE q |
|
Q |
|
|
Q . |
(8.3) |
|
|
kM |
|
kM |
|
|
|
|
|
|
|
|
|||
Обозначив L / R , |
kM / R r , kM kE 2 / R s , |
приведем выражение |
|||||
(8.3) к виду |
|
|
|
|
|
|
(8.4) |
|
|
|
|
|
|
||
|
Q Q r u s q . |
|
|
|
|||
|
|
|
|
|
|
|
|
Соотношение (8.4), связывающее входной (u ) и выходные (Q,q ) параметры
двигателя, называется динамической характеристикой. Параметр называется
электромагнитной постоянной времени и характеризует инерционность элек-
тромагнитных процессов, происходящих в двигателе. Обычно величина его лежит в пределах от 0,02 до 0,1 с. Параметр s называется крутизной характеристики двигателя. Чем больше крутизна s , тем слабее изменение нагрузки влияет на величину угловой скорости ротора.
Характеристика (8.4) широко используется при анализе динамических процессов, происходящих в машинах, приводимых в движение электродвигателями постоянного тока с независимым возбуждением. Если исследуется статический процесс, при котором Q const , выражение (8.4) упрощается и переходит в
статическую характеристику двигателя:
Q r u s q .
Статическая характеристика может использоваться и для исследования таких динамических процессов, при которых Q Q , то есть в тех случаях, ко-
гда малой является либо постоянная времени , либо производная Q .
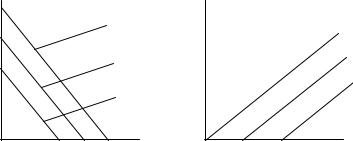
На рис. 8.3 построены два семейства статических характеристик: на рис. 8.3, а изображены рабочие характеристики, выражающие зависимости Q(q) при
различных постоянных значениях u ; на рис. 8.3, б представлены регулировочные характеристики q(u) , построенные для различных постоянных значений
Q . В рассматриваемом
случае все эти характеристики являются линейными.
Регулировочная характеристика, соответствующая Q = 0 ( то есть определяющая зависимость при отсутствии нагрузки на двигатель), называется ха-
рактеристикой холостого хода. При определенных условиях эта характеристика может рассматриваться как приближенная и
а) |
б) |
Q |
q |
|
|
u3 |
Q Q |
|
1 |
u2 |
Q2 |
u u1 |
Q3 |
|
|
q |
u |
|
|
|
Рис. 8.3 |
201
при Q 0 . Это имеет место в тех случаях, когда статическая характеристика
двигателя является достаточно жесткой, то есть когда крутизна s достаточно велика, так что влиянием нагрузки на скорость можно в первом приближении пренебречь. Характеристика. полученная при таком предположении, называет-
ся идеальной кинематической характеристикой; она может быть приведена к виду
|
r |
u . |
(8.5) |
|
s |
||||
q |
В соответствии с этой характеристикой угловая скорость ротора полностью определяется значением входного параметра двигателя: при ее использовании двигатель становится как бы «источником скорости».
Общий вид механических характеристик двигателей. В общем случае механические характеристики различных двигателей (тепловых, гидравлических, пневматических) могут быть представлены в форме, аналогичной полученным выше. На холостом ходу, при Q 0 , поведение двигателя характеризу-
ется идеальной кинематической характеристикой
q f u , |
(8.6) |
|
|
которая в общем случае может быть нелинейной. С помощью такой характеристики приближенно описываются свойства двигателей, у которых скорость в статических режимах слабо зависит от нагрузки. Кроме рассмотренных выше электродвигателей такими свойствами обладают гидравлические двигатели с объемным и дроссельным управлением. В тепловых двигателях внутреннего сгорания и в пневматических двигателях наблюдается обратное: значение входного параметра u в значительной мере предопределяют величину обобщенной силы. Статические режимы в таких двигателях могут приближенно описываться идеальной силовой характеристикой
Q Fi u . |
(8.7) |
В общем случае при исследовании статических режимов используются ста-
тические характеристики вида |
. |
(8.8) |
q fs u,Q |
||
|
|
|
Они могут быть представлены в форме, разрешенной относительно Q: |
(8.9) |
|
Q Fs u, q . |
||
|
|
|
Эти характеристики учитывают влияние нагрузки на обобщенную скорость, которое в большей или меньшей степени проявляется у всех реальных двигателей. Регулировочные характеристики, получающиеся из (8.8) при Q=const, и рабочие характеристики, получающиеся из (8.9) при u=const, вообще говоря, являются нелинейными. Как правило, с ростом нагрузки обобщенная скорость q
202

уменьшается, и рабочие характеристики оказываются «падающими». Величина производной Qq , взятая с обратным знаком
s |
Q |
, |
(8.10) |
|
|||
|
q |
|
|
называется крутизной статической характеристики в данной точке; для па-
дающей характеристики s 0 . Если обобщенная скорость слабо зависит от нагрузки, статическая характеристика двигателя называется жесткой; если же изменение скорости слабо влияет на величину момента, характеристика являет-
ся мягкой.
В некоторых задачах динамики машин значения u и q могут считаться близкими к некоторым средним значениям u0 и 0 . В этих случаях линейная
статическая характеристика может быть линеаризована в окрестности точки
(u0 , ω0 ):
Q Fs u0 ,ω0 |
Fs |
u0 ,ω0 u u0 |
Fs |
u0 ,ω0 |
q ω0 . |
(8.11) |
|
|
|||||
|
u |
|
q |
|
|
|
|
|
|
|
|
Статические характеристики адекватно отражают свойства реальных двигателей только при статических режимах работы машины, то есть в тех случаях, когда параметры u,q,Q постоянны или изменяются незначительно и достаточно
медленно. В более общем случае приходится учитывать инерционность физических процессов, происходящих в двигателе. В электрическом двигателе постоянного тока такая инерционность связана с индуктивностью цепи якоря; она приводит к тому, что изменение входного напряжения не сразу влечет за собой изменение тока в цепи ротора; происходит переходный процесс, продолжительность которого зависит от постоянной времени τ.
В двигателях других типов у инерционности иная физическая природа. В гидравлическом двигателе она обусловлена сжимаемостью жидкости. Однако во всех случаях она приводит к тому, что обобщенная скорость выходного звена зависит не только от нагрузки, но и от ее производных по времени. В первом приближении это можно учесть введением в статическую характеристику (8.9)
первой производной от Q t и представлением ее в форме
|
|
(8.12) |
Q Q Fs u,q . |
||
|
|
|
Параметр τ называется в общем случае собственной постоянной времени двигателя, а выражение (8.12) – его динамической характеристикой. Необхо-
димо отметить, что для некоторых классов двигателей характеристика вида (8.12) может использоваться только в тех случаях, когда q изменяется в срав-
нительно узких пределах, а для исследования других динамических режимов необходимо пользоваться более сложными динамическими моделями, которые в этом курсе не рассматриваются.
203