

ЭКЗ / tmm_chapter6
.pdfГЛАВА 4. СИЛОВОЙ РАСЧЕТ МЕХАНИЗМОВ
4.1.Постановка задачи силового расчета
Вкурсе теоретической механики рассматривались две задачи динамики:
1.Дан закон движения материальной точки известной массы; требуется найти силу, действующую на точку (первая задача динамики);
2.Дана сила, приложенная к материальной точке; требуется найти закон движения точки (вторая задача динамики).
Втеории механизмов и машин первая задача динамики: при известном (заданном) законе движения ведущего звена (ведущих звеньев) механизма требуется найти силы, действующие в механизме. Решение этой задачи называют си-
ловым расчетом.
К заданным активным силам относятся:
а) Рабочая нагрузка Р = Р(х), где Р – рабочая нагрузка, х – координата точки приложения нагрузки.
Вболее сложных случаях нагрузка зависит также от скорости x , ускоренияx и времени t: P P(x, x, x,t) .
Учитывая, что x (q), |
|
|
|
|
2 |
2 |
|
|
, |
||
x |
q q , |
x |
q2 |
q |
q q |
||||||
|
P P |
* |
|
|
|
|
|
|
|
(4.1) |
|
|
|
(q,q,q,t) . |
|
|
|
||||||
Если к механизму приложена не одна, а рабочих нагрузок, то для них задаются зависимостей:
* |
|
(4.2) |
Pm Pm |
(q,q,q,t) , (m = 1, 2, … , ) . |
В многоподвижных механизмах координаты, скорости и ускорения точек приложения нагрузок Pm зависят от всех обобщенных координат и их произ-
водных:
|
|
w |
s |
|
|
w s |
w |
2 s |
|
|
|
|
|
|
xs s (q1,...,qw ); |
xs |
|
|
qu ; |
xs |
qu |
|
qu qm |
, (4.3) |
|||||
|
|
|
qu |
|
|
u 1 qu |
|
qu qm |
|
|
|
|
|
|
|
|
u 1 |
|
|
m 1 |
|
|
|
|
|||||
* |
|
|
|
|
|
|
|
(m = 1, … , ) . |
|
|
|
(4.4) |
||
Pm Pm |
(q1,...,qw ,q1 |
,...,qw |
,q1 |
,...,qw ,t) , |
|
|
|
|||||||
В дальнейшем будем предполагать, что рабочие нагрузки не зависят явно от времени и ускорений qu , поэтому выражения (4.4) будут представляться в фор-
ме:
* |
|
|
(4.5) |
Pm Pm |
(q1,...,qw , q1 |
,...,qw ) , (m = 1, … , ) |
130
б) Cилы тяжести звеньев Gi, i 1, , N , где N – число звеньев.
в) Упругие силы, возникающие при деформации пружин, также являются активными.
Целью силового расчета является определение обобщенных движущих сил и реакций во всех кинематических парах.
Обобщенные движущие силы – это обобщенные силы, которые необходимо приложить к входным звеньям механизма для того, чтобы получить заданное программное движение при выполнении рабочего процесса.
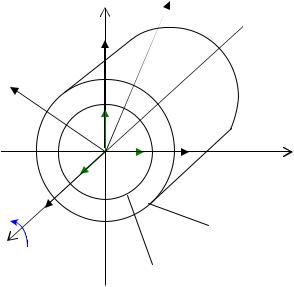
Реакции в кинематических парах – пассивные силы; как правило, это силы, распределенные по поверхностям соприкосновения конструктивных элементов, образующих пару. Ограничимся определением главных векторов и главных моментов сил реакций в каждой кинематической паре.
|
|
|
Главный вектор сил реакций R . |
|||||
y |
R |
|
Главный момент M0R . |
|||||
M R |
M0 |
|
Определяются заданием шести |
|||||
0 y |
|
скалярных величин – их проекций |
||||||
R |
|
R , R |
y |
, R , M R |
, M R |
, M R на оси сис- |
||
|
x |
|
z ox |
0 y |
0 z |
|||
Ry |
|
темы Оxyz. |
|
|
||||
M 0Rx |
|
|
|
|
|
|
||
|
|
Общее число неизвестных |
||||||
0 |
Ry |
x |
||||||
|
|
|
|
|
||||
Rz |
|
nu = w + 6p = w + 6p1 + 6p2 + 6p3 + |
||||||
M 0Rz |
|
|||||||
|
1 |
6p4 |
+ 6p5 . |
|
(4.6) |
|||
z |
|
|
|
|
|
|
||
2 |
|
Пусть число подвижных звень- |
||||||
z |
|
|||||||
|
|
ев равно N. |
|
|
||||
Рис. 4.1 |
|
|
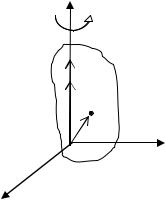
Для каждого подвижного звена |
|||||
|
можно составить |
два векторных |
||||||
|
|
|||||||
уравнения движения на основе теорем об изменении количества движения и кинетического момента.
g |
Fsk ; dLS 0 |
g |
|
dKS S |
S rsk Fsk ,(s 1,..., N 1), |
(4.7) |
|
dt k 1 |
dt |
k 1 |
|
KS – вектор количества движения s–го звена,
LSO – его кинетический момент,
Fsk – внешние силы, действующие на s–е звено, rsk – радиусы-векторы точек их приложения,
gs – число сил, приложенных к s–му звену.
Общее число векторных уравнений (4.7) равно 2N; проецируя их на оси координат, получаем 6N скалярных уравнений.
131
Пусть механизм не содержит избыточных связей. Тогда для него справедлива формула
5 |
|
|
|
|
w 6N (6 |
s) ps 6N 5 p1 |
4 p2 |
3 p3 2 p4 p5 , |
(4.8) |
s 1
где ps– число s–подвижных пар. Из уравнения (4.8) можно выразить число уравнений neq = 6N:
6N w 5 p1 4 p2 3 p3 2 p4 p5 .
Сравнивая число неизвестных nu и число уравнений neq , имеем:
5 |
|
nu neq p1 2 p2 3 p3 4 p4 5 p5 sps . |
(4.9) |
s 1
При такой постановке задачи силового расчета число неизвестных всегда больше числа уравнений, что делает эту задачу неразрешимой. Она тем более неразрешима, если в механизме имеются избыточные связи, поскольку при этом число неизвестных реакций возрастает, а число уравнений остается неизменным.
При идеальных связях работа сил реакций каждой кинематической пары должна равняться нулю при любом возможном перемещении, т.е. должно быть
A R |
X |
x R |
y R z M R |
X |
M R |
M R |
Z |
0. |
(4.10) |
||||||
|
Y |
Z |
0 X |
|
|
|
0Y |
Y |
0Z |
|
|
|
|||
Вращательная пара |
A M0RZ Z |
0. |
|
|
|
|
|
|
|
|
|
|
|
||
Поскольку при повороте Z 0, имеем M0RZ 0. |
|
|
|
|
|
||||||||||
В поступательной паре A RX x 0, |
и поскольку x 0, |
имеем RX |
0 . |
||||||||||||
В цилиндрической паре отличны от нуля возможные перемещения Z и z |
|||||||||||||||
|
|
|
A R z M R |
|
Z |
0. |
|
|
|
|
|
||||
|
|
|
Z |
|
0Z |
|
|
|
|
|
|
|
|
||
В силу независимости возможных перемещений z и Z |
это условие долж- |
||||||||||||||
но выполняться как при z 0, Z |
0, |
так и при z 0, |
Z |
0. Это приво- |
|||||||||||
дит к выводу о том, что RZ=0 иM 0RZ 0 . |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
В результате для механизма в целом появляется sps |
условий, что делает |
||||||||||||||
s 1
задачу силового расчета разрешимой. Часто в этом случае говорят о статиче-
ской определимости механизма.
132

4.2.Уравнения кинетостатики. Определение главного вектора
иглавного момента сил инерции
Силы инерции материальных точек s–го звена
|
|
|
Фsi |
msi wsi (i = 1, … , ks, s = 1, … , N) , |
(4.11) |
|||||
вектор количества движения s–го звена и его кинетический момент |
|
|||||||||
|
|
|
|
KS msi vsi, |
Ls0 rsi msi vsi |
|
||||
|
|
|
dKS |
|
d |
i |
|
i |
|
|
|
|
|
|
msi vsi msiwsi Φsi ΦS , |
(4.12) |
|||||
|
|
|
|
dt |
||||||
dLS 0 |
|
d |
dt |
|
i |
i |
i |
|
||
|
rsi msi vsi (vsi |
msi vsi rsi msiwsi ) rsi Φsi M0( S ). |
(4.13) |
|||||||
dt |
||||||||||
dt |
|
i |
|
i |
|
|
i |
|
||
Здесь ΦS – главный вектор сил инерции s–го звена, а M(0S ) – их момент относительно некоторой произвольно выбранной точки О.
Выделим активные силы PSK и реакции кинематических пар RSK :
FSK (PSK RSK ) PS RS ,
K |
K |
1 |
rSK FSK rSK (PSK RSK ) M0(PS) M0(RS) , |
||
K |
|
K |
главный
(4.14)
где PS и RS – главные векторы активных сил и реакций связей, действующих
на s–е звено, M(0PS) и M(0RS) – их главные моменты относительно точки О. Вместо уравнений
|
|
g |
|
|
|
g |
|
|
|
|
dKS S Fsk ; dLS 0 |
S |
rsk Fsk ,(s 1,..., N 1), |
(4.7) |
|||||||
dt |
|
k 1 |
|
dt |
|
k 1 |
|
|
|
|
получаем |
|
|
|
|
M(P) M(R) M( ) 0. |
|
|
|||
P R |
S |
Φ |
S |
0; |
(s 1,..., N ) . |
(4.15) |
||||
S |
|
|
|
0S |
0S |
0S |
|
|
||
Уравнения движения получили форму уравнений равновесия. Их называют уравнениями кинетостатики, а модель силового расчета механизма, основан-
ную на их применении, – кинетостатической моделью.
133

Для главного вектора сил инерции Φ и для главного момента их M(0 ) относительно точки О справедливы следующие выражения:
|
|
Ф mwC |
m(w0 |
ε rC ω ω rC ) |
|
|
|
(4.16) |
|||||||||||
|
|
M |
(J |
0 |
ε ω J |
0 |
ω mr w |
0 |
). |
|
|
|
|
|
(4.17) |
||||
|
|
0 |
|
|
|
|
c |
|
|
|
|
|
|
|
|
||||
|
ω |
z |
|
|
Здесь m – масса звена, |
|
|
|
|
||||||||||
|
ε |
|
|
J0 – тензор инерции в точке О. |
|
|
|||||||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
C |
|
|
|
|
|
|
J x |
|
J xy |
J xz |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
w |
|
rC |
|
|
|
|
J |
0 |
|
J |
xy |
J |
y |
J |
yz |
|
, (4.18) |
||
0 |
|
|
|
|
|
|
|
|
|
|
J z |
|
|
||||||
|
|
0 |
|
|
y |
|
|
|
|
J xz |
J yz |
|
|
|
|||||
x |
где Jx, Jy, Jz – осевые, а Jxy, Jyz, Jxz – центро- |
|
бежные моменты инерции. |
||
Рис. 4.2 |
a). Поступательное движение звена. Учитывая, что ω=0, ε=0, найдем M(0 ) :
M0 m |
i |
j |
k |
|
xc |
yc |
zc |
|
|
m i yc woz zc woy j |
wox |
woy |
woz |
|
zc wox xc woz k xc woy yc wox . |
||||
Здесь хс, yc, zc – координаты центра масс. Тогда:
x m wox , y m woy , z m woz , |
|
||||
M m y w |
z w , |
|
|||
0 x |
c oz |
c oy |
|
(4.19) |
|
M m z w |
x w , |
||||
|
|||||
0 y |
c ox |
c oz |
|
|
|
M m x w |
y w |
. |
|
||
0 z |
c oy |
c ox |
|
|
|
134
б). Вращение вокруг неподвижной оси (рис. 4.3). |
|
|
|
|
||||||||||
z |
|
Здесь ωх = ωy = 0; |
ωz = ω; εx = εy = 0; εz = ε; w0 = 0. |
|||||||||||
|
|
Для определения главного вектора сил инерции |
||||||||||||
|
|
найдем векторные произведения: |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
j |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
C |
y |
ε rc |
0 |
0 |
|
|
|
i ( yc ) j ( xc ) k (0) , |
||||||
rc |
|
xc |
yc |
zc |
|
|
|
|
|
|
|
|
|
|
x |
|
|
ω (ω rc ) |
|
i |
j |
k |
|
|
|||||
|
|
|
|
|||||||||||
|
|
|
0 |
0 |
|
|
||||||||
|
|
|
|
|
||||||||||
Рис. 4.3 |
|
|
|
|
|
|
|
|
|
yc |
xc |
0 |
|
|
|
|
i ( 2 x |
|
|
|
|
|
|||||||
|
|
|
) j ( 2 |
y ) k (0). |
||||||||||
|
|
|
|
|
c |
c |
|
|
|
|||||
Отсюда найдем проекции главного вектора сил инерции:
Фx m (xc 2 yc ), |
|
||||
Фy m ( yc 2 |
xc ), |
(4.20) |
|||
Фz 0. |
|
|
|
|
|
Для определения главного момента сил инерции найдем J0 ε и ω I0ω: |
|||||
|
J |
xz |
|
|
|
|
|
|
, |
|
|
J0ε |
J yz |
|
|||
|
J z |
|
|
|
|
|
|
|
|
||
|
i |
j |
|
||
ω J0ω |
0 |
0 |
|
J xz |
J yz |
|
k
i ( 2 J yz ) j ( 2 jxz ) k 0 . J z
Подставляя найденные соотношения в выражение (4.17), найдем главный момент сил инерции в проекциях на координатные оси:
M0Фx J yz 2 Jxz , |
|
M0Фy Jxz 2 J yz , |
(4.21) |
M0Фz Jz . |
|
135
в). Плоское движение звена. Выберем в качестве полюса центр масс звена С. Введем систему координат Сxyz так, чтобы ось Сz была перпендикулярна плоскости движения звена. В осях Cxyz построим тензор инерции JС:
|
C |
C |
C |
|
|
J x |
J xy |
J xz |
|
JС J xyC |
J yC |
J yzC |
. |
|
|
C |
C |
C |
|
|
J xz |
J yz |
J z |
|
Тогда получим следующие выражения для главного вектора и главного момента сил инерции:
Φ |
x |
mw |
|
M Ф J C 2 |
J C |
, |
|
|
|
cx |
|
0 x |
yz |
xz |
|
|
|
Φ |
y |
mw |
, |
M Ф J C 2 |
J C , |
(4.22) |
||
|
cy |
|
0 y |
xz |
yz |
|
|
|
Φ |
z |
mw |
|
M 0Фz |
J zC . |
|
|
|
|
cz |
|
|
|
|
|
|
|
4.3. Решение уравнений кинетостатики
Для каждой структурной группы, не содержащей избыточных связей, справедлива структурная формула
5 |
|
|
wG 6NG (6 |
s) pSG , |
(4.23) |
S 1
где wG – число степеней подвижности группы, NG – число подвижных звеньев группы, pSG – число s-подвижных кинематических пар в группе. С другой стороны, как было показано выше, сумма
5 |
|
|
nu wG (6 |
s) pSG |
(4.24) |
S 1
представляет собой число неизвестных движущих сил и реакций в идеальных связях, подлежащих определению. Сравнивая выражения (4.23) и (4.24), замечаем, что nu=6NG, т.е. число неизвестных сил равно числу уравнений кинетостатики. Таким образом, уравнения кинетостатики могут решаться последовательно для каждой структурной группы.
Силовой расчет следует производить в направлении, обратном геометрическому и кинематическому расчетам.
136
Особенности расчета плоского механизма.
Определяем компоненты реакций, лежащих в плоскости движения хОy (Rx, Ry, M 0Rz ), и обобщенные движущие силы.
Из-за наличия избыточных связей определение всех реакций второй группы (Rz, M 0Rx , M 0Ry ) становится невозможным.
а) Пример |
|
|
|
|
|
|
|
|
|
|
Активные силы: |
y |
|
A |
2 |
|
|
|
|
|
|
|
|
|
Ф2 |
|
|
|
||||
( P, G1, G2 , G3 ) |
Q |
|
|
|
|
|
|
|||
Силы инерции и проекции |
1 |
S2 |
|
|
|
|||||
моментов сил инерции на ось |
O |
|
|
M S( 2 ) |
3 |
|
||||
z: |
|
|
|
x |
G2 |
B |
Р Ф3 |
|||
(Φ2 ,Φ3 ) , ( M S 2 ). |
|
|
|
|
|
|||||
|
|
G1 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
Подлежат определению: |
|
|
|
|
|
|
|
G3 |
|
|
движущий момент Q, реакции |
|
|
|
|
|
|
|
|
|
|
в кинематических парах. |
Рис. 4.4 |
|
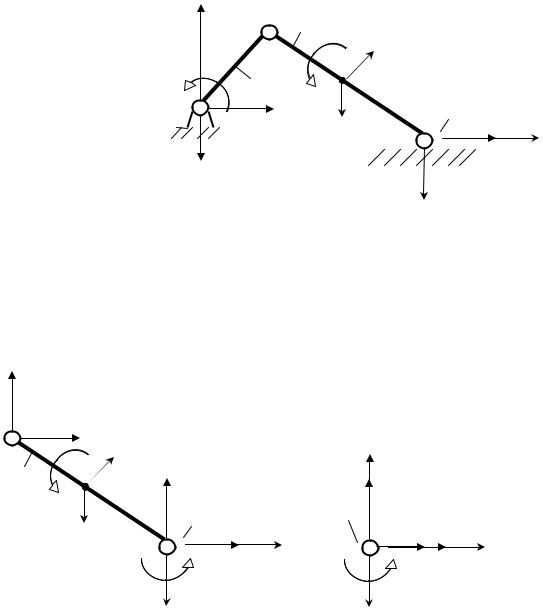
Группы Ассура ВВП
|
R12y |
|
a) |
|
|
|
|
|
|
|
б) |
|
|
A |
R12x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
2 |
|
S2 |
Ф2 |
|
|
|
|
R03 |
|
|||
|
|
|
R03 |
|
|
|
|
||||||
|
|
|
|
|
|
R23y |
|
||||||
|
M S 2 |
|
|
|
|
3 |
|
|
|||||
|
|
|
B |
3 |
Р Ф3 |
|
B R |
Ф3 |
|||||
|
|
|
G2 |
|
|
|
|
|
|
|
23x Р |
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
M ( R ) |
M03( R ) |
|
|
|
||
|
|
|
|
|
G |
3 |
03 |
G3 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 4.5
Всего 6 неизвестных: R12x, R12y, R23x, R23y, R03, M03(R) .
Для плоской двухзвенной группы можно составить 6 независимых уравнений кинетостатики.
137
Сумма моментов всех сил, действующих на звенья 2 и 3, относительно оси z:
(Р + Ф3)(yA – yB) – (R03 – G3)(xA – xB) + Ф2x(yA – yS2) –
– (Ф2y – G2)(xA – xS2) + M S 2 = 0,
M03(R) 0
Уравнения для звеньев 2 и 3:
R23x + P + Ф3 = 0,
R03 + R23y – G3 = 0.
R12x + Ф2x + P + Ф3 = 0;
R12y + Ф2y – G2 + R03 – G3 = 0.
|
|
R21y |
Первая структурная группа. |
|
||||
y |
|
|
|
|||||
|
A |
|
Неизвестные: |
компоненты реакции R01x, R01y в |
||||
R01y |
|
шарнире O и движущий момент Q. |
||||||
|
R21x |
|||||||
|
|
Уравнения кинетостатики: |
|
|||||
|
|
|
|
|
||||
Q |
1 |
|
|
|
|
R21x + R01x = 0, |
||
O |
|
|
|
|
R21x(y0 |
R21y + R01y – G1 = 0, |
||
|
R01x x |
|
|
– yA) – R21y(x0 – xA) + Q = 0. |
||||
|
|
|
|
|||||
|
G1 |
|
|
|
|
|
|
|
|
|
Рис. 4.6 |
|
|
|
|
|
|
Последовательность силового расчета |
|
|
||||||
|
Ф2 Ф3 |
|
G1 |
|
||||
|
M S 2 |
|
|
|||||
P |
|
|
|
R12x = – R21x |
|
|
R01x, R01y, Q |
|
|
|
|
|
Звено 1 |
||||
|
|
|
|
|
||||
G2, |
G3 |
Группа BBП |
|
|
|
|||
|
|
|
||||||
|
|
|
|
|||||
(звенья 2,3) |
|
|
|
|
(кривошип) |
|
||
|
|
|
|
R12y = – R21y |
|
|
|
|
|
|
|
|
|
|
|||
|
|
R03, M 03( R ) , R23x, R23y |
|
|
||||
|
|
|
|
|
Рис. 4.7 |
|
|
|
138
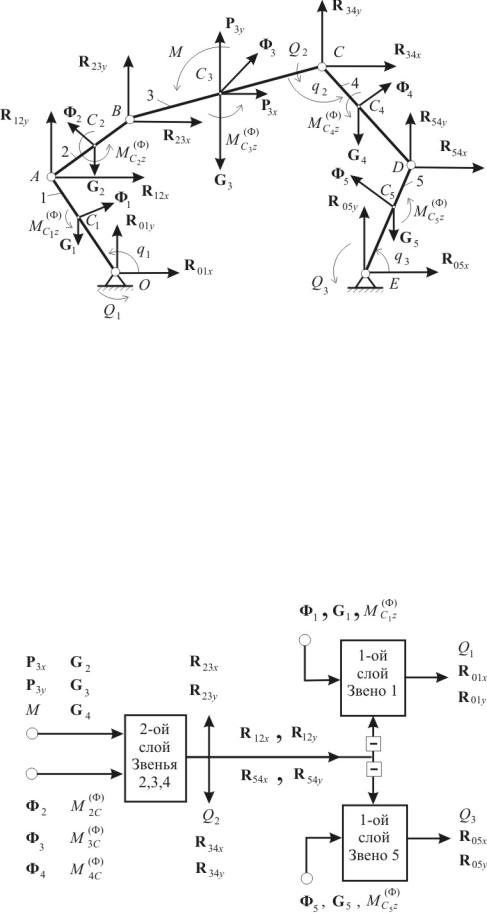
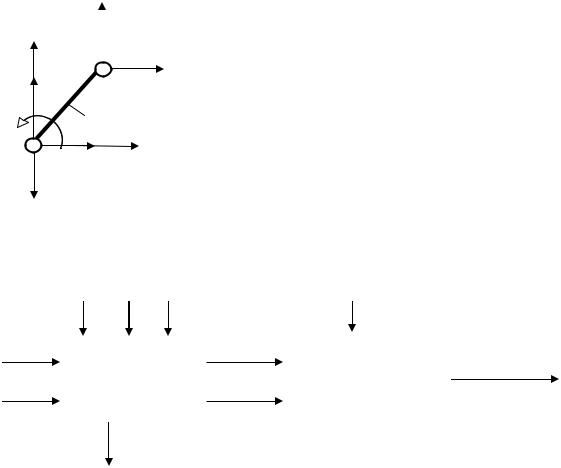
Рис. 4.8
б) Механизм с тремя степенями подвижности .
Механизм состоит из двух однозвенных групп (звенья 1 и 5) и одной трехзвенной (звенья 2, 3, 4).
Силовой расчет последней структурной группы АВСD:
9 уравнений кинетостатики, из которых определяем обобщенную движу-
щую силу Q2 и 8 реакций (R12x, R12y, R23x, R23y, R34x, R34y, R54yx R54y).
Затем приступаем к расчету однозвенных групп первого слоя ОА и ЕD. При
этом силы R21x = – R12x, R21y = – R12y, R45x = – R54x, R45y = – R54y Из уравнений кинетостатики для звена ОА определяем R01x, R01y и обобщенную движущую силу
Q1; из уравнений, составленных для звена ЕD, определяем R05x, R05y и обобщенную движущую силу Q3.
Рис. 4.9
139