

ЭКЗ / tmm_chapter2
.pdfГЛАВА 2. ГЕОМЕТРИЯ И КИНЕМАТИКА МЕХАНИЗМОВ
2.1. Геометрический анализ механизмов
Зависимость выходных параметров от входных обобщенных координат механизма называется функцией положения механизма.
Для механизма, показанного на рис. 2.1:
|
y |
2 |
B |
|
|
|
xK Пx (q1 ); |
(2.1) |
|
А |
K |
|
|
|
|
yK Пy (q1 ). |
|||
2 |
|
|
3 |
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
Определение |
функций |
положения |
|||
1 |
q1 |
|
3 |
x |
|||||
|
O |
|
механизма составляет прямую |
задачу |
|||||
|
I |
|
C |
|
геометрического анализа. |
|
|
||
|
|
|
II |
Рассмотрим |
последовательность |
||||
|
Рис. 2.1 |
|
|
составления |
функции |
положения |
|||
|
|
|
|
хК(t)=ПХК[q1(t)], yK(t)=ПYК[q1(t)] |
|
||||
|
|
|
|
|
|
||||
1.Проводится структурный анализ механизма: |
|
|
|
|
|||||
Однозвенная одноподвижная СГ I (кривошип 1 и вращательную пару О),
Диада ВВВ, содержащую звенья 2 и 3 и три вращательные пары А, В и С.
|
y |
2 |
B |
|
А |
K |
|
|
|
2 |
|
|
3 |
|
|
|
|
||
|
|
|
|
|
1 |
q1 |
|
3 |
x |
|
O |
|
||
|
|
C |
|
|
|
I |
|
|
|
|
|
|
II |
|
|
Рис. 2.1 |
|
|
|
|
|
|
|
2.В каждой структурной группе
вводятся входные и выходные коор-
динаты.
3.Путем размыкания некоторых кинематических пар структурные группы приводят к открытым кинематическим цепям типа «дерево».
4.Вводятся групповые координаты, определяющие, вместе с входными, положение звеньев «дерева». Число групповых координат должно быть равно числу разомкнутых связей (на рис. 2.1 это углы 2 и 3).
5.Составляются условия замыкания ранее разомкнутых связей и функции
положения. На основе этих условий получаются групповые уравнения, связывающие входные, выходные и групповые координаты структурной группы.
16

|
y |
2 |
B |
|
А |
K |
|
|
|
2 |
|
|
3 |
|
|
|
|
||
|
|
|
|
|
1 |
q1 |
|
3 |
x |
|
O |
|
||
|
|
C |
|
|
|
I |
|
|
|
|
|
|
II |
|
|
Рис. 2.1 |
|
|
|
|
|
|
|
Функции положения для группы I:
|
|
|
|
xA l1 cos q1 |
, |
|
(2.2) |
||
|
|
|
|
уA l1 sin q1. |
|
||||
|
|
|
|
|
|
||||
Групповые уравнения для группы II: |
|||||||||
xA l2 cos 2 |
xC l3 cos 3 ; |
(2.3) |
|||||||
y |
A |
l |
2 |
sin |
2 |
y |
l |
sin . |
|
|
|
|
C |
3 |
3 |
|
|||
Уравнения получены из условия замыкания связей в шарнире В (неизвестны групповые координаты 2 и 3)
Функции положения точки К группы II:
xK xA lAK cos 2 |
; |
(2.3 ) |
|
yK yA lAK sin 2 . |
|||
|
|||
ФП для механизма с несколькими (W) степенями подвижности: |
|
||
xs Пs (q1,..., qW ), s = 1, …, m, |
|
(2.4) |
|
где m – число выходных координат.
Составление функций положения на примере плоской платформы (рис. 2.2).
1. Структурный анализ механизма. |
|
Три структурные группы: |
|||||||
|
|
y |
|
|
|
|
|
|
|
|
|
3 |
M |
3 |
C |
4 |
III |
однозвенные одноподвижные I и II, |
|
2 |
|
B |
|
|
трехзвенную одноподвижную III. |
||||
|
|
|
|
|
|||||
|
|
|
|
q3 |
|
4 |
II |
2. Введем входные и выходные коор- |
|
А |
|
|
2 |
|
D |
||||
|
|
|
|
|
динаты. |
||||
|
|
|
|
5 |
|
||||
1 |
|
|
q1 |
|
|
E |
x |
Группа I: вход хО, уО, q1, |
|
O |
|
|
|
q2 |
выход хА, уА; |
||||
|
I |
|
|
|
|
|
|
|
Группа II: вход хЕ, уЕ, q2, |
|
|
|
|
|
|
|
|
выход xD, yD; |
|
|
|
|
Рис. 2.2 |
|
|
|
|||
|
|
|
|
|
|
Группа III: вход хА, уА, хD, yD, q3, |
|||
выход хМ, уМ, 3.
17

|
|
|
y |
3 |
M |
3 |
|
C |
4 |
||
|
2 |
B |
|
|
|
|
|
|
|||
|
|
|
|
|
q3 |
|
|
4 |
|||
А |
|
|
2 |
|
|
D |
|||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
5 |
|||||
1 |
|
|
|
q1 |
|
|
|
|
E |
||
|
O |
|
|
|
|
q2 |
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.2 |
|
|
|
|||
|
xA l1 cos q1, |
, |
xD xE l5 cos q2 ; |
||||||||
|
у |
A |
l sin q . |
|
y |
D |
y |
E |
l |
sin q ; |
|
|
|
1 |
1 |
|
|
|
5 |
2 |
|||
|
3.Произведем размыкание группы |
III III в шарнире C |
|
II |
4.Введем групповые координаты: |
2, 3, и 4. |
|
|
5.Запишем условия замыкания: xC3 |
x |
= xC4, уC3 = yC4. |
|
Составим групповые уравнения: |
Группа I,II:
Группа III:
xA l2 cos 2 |
l3 cos 3 |
xD l4 cos 4 |
; |
(2.5) |
yA l2 sin 2 |
l3 sin 3 |
yD l4 sin 4 . |
|
|
|
|
Дополнительное уравнение для углов:
3 + q3 = 4. |
(2.6) |
Обратная задача геометрического анализа: определение обобщенных входных координат в зависимости от выходных, т.е. отыскание функций:
qк = Фк (х1, … , хm), к = 1, … , W. |
(2.7) |
m= W (число выходных координат равно числу степеней подвижности):
II |
|
y |
3 M |
3 |
2 |
|
B |
||
|
|
|
||
|
|
|
q3 |
|
А |
|
|
2 |
|
|
|
|
||
1 |
O |
|
q1 |
|
|
|
|
|
Рис. 2.3
I
C 4
4
D
E  q2
q2
задача может иметь одно или неIII сколько решений;
|
|
|
m> W: |
|
|
|
задача в общем случае не имеет |
||
5 |
|
решения; |
m< W: |
|
x |
|
|||
|
||||
|
задача имеет бесконечное число ре- |
|||
шений (некоторое число координат (а именно W – m) можно задать произвольно).
18

Пример трехподвижной платформы. |
Дано: хМ, уМ, 3. |
II |
|
y |
3 M |
3 |
C |
I |
|
III |
Определить: q1, q2, q3. |
|
|
B |
4 |
|
|||||
2 |
|
|
|
||||||
|
|
|
q3 |
|
4 |
|
|
|
|
А |
|
2 |
|
D |
|
|
Структурный анализ инверсного ме- |
||
|
|
|
|
|
|||||
1 |
|
q1 |
|
|
E |
q2 |
5 |
x |
ханизма. |
O |
|
|
Три структурные группы: |
||||||
|
|
|
|
|
|
|
|
однозвенная трехподвижная I , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.3 |
|
|
|
|
II и III – двухзвенные группы Ас- |
|
|
|
|
|
|
|
|
|
|
сура типа ВВВ.. |
Составим уравнения для группы I:
xB xM |
lBM cos 3 |
; |
|
|||
yB yM |
lBM sin 3 |
; |
(2.8) |
|||
xC xM lMC cos 3 |
; |
|||||
|
||||||
yC yM lMC sin 3. |
|
|||||
Для группы II : |
|
|
|
|
|
|
l1 cos q1 l2 cos 2 xB ; |
(2.9) |
|||||
l1 sin q1 l2 sin 2 |
yB . |
|||||
|
||||||
Для группы III: |
|
|
|
|
|
|
xE l5 cos q2 |
l4 cos 4 |
xC ; |
(2.10) |
|||
yE l5 sin q2 |
l4 sin 4 |
yC . |
||||
|
||||||
Дополнительное уравнение для углов: |
3 + q3 = 4. |
|
||||
2.2.Решение групповых уравнений
Если групповые уравнения имеют решение, то оно, как правило, является не единственным.
xB xA AB cos 2 ;
yB yA AB sin 2 e.
2 |
M = -1 |
|
А |
|
M = 1 |
Определяем: из второго урав- |
||||||||||||
|
|
|
|
|
|
|
q |
|
|
|
|
1 |
нения находим sin 2, |
|
||||
А |
|
|
B2 |
|
|
|
O |
|
|
|
|
|
||||||
|
|
|
е |
|
|
|
|
B1 |
1 sin2 2 , |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
находим cos 2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
подставляем в первое выраже- |
|
|
|
|
Рис. 2.4 |
|
|
|
|
|
|
|
|
|
ние и находим xB. |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
cos 2 М |
1 sin2 2 |
, где M 1 – способ сборки. |
|
|||||||||||||||
19
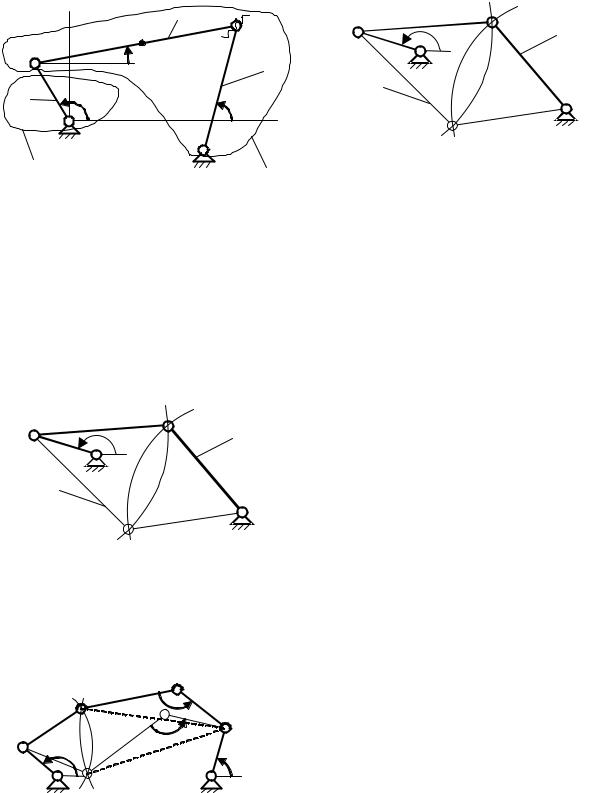
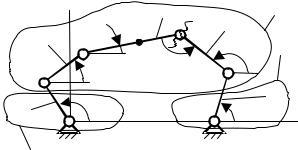
Шарнирный четырехзвенник. |
|
|
|
|
|
|||
|
y |
2 |
B |
|
А |
|
B1 |
|
А |
K |
|
|
|
q1 |
M= -1 |
||
2 |
|
|
3 |
|
|
|
|
|
|
|
|
|
O |
|
|
||
|
|
|
|
1 |
|
|
||
|
|
|
|
|
|
|
||
1 |
q1 |
|
3 |
x |
M= |
|
|
C |
|
O |
|
|
|
|
|||
|
|
C |
|
|
B2 |
|
|
|
|
I |
|
|
|
|
|
||
|
|
|
II |
|
Рис. 2.5 |
|
|
|
|
Рис. 2.1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
М= 1 (положение АВ2С ) – обход шарниров в последовательности А,В,С
происходит против часовой стрелки.
М= –1 (положение АВ1С ) – обход шарниров в последовательности А,В,С
происходит по часовой стрелке.
Особое или сингулярное положение (если АВ+ВС=ОА+ОС при
определенном q сборки совпадают). |
В механизме, в котором существует |
|||||||||
А |
|
|
|
|
||||||
|
|
B1 |
M= -1 |
особое |
положение, |
после |
его |
|||
|
|
q1 |
прохождения |
возможна |
|
перемена |
||||
|
|
|
|
|||||||
|
|
O |
|
|
способа сборки и, следовательно, |
|||||
1 |
|
|
|
реализация |
побочного |
|
решения |
|||
M= |
|
|
|
C |
групповых уравнений. |
|
|
|
||
|
|
|
|
|
|
|
||||
|
|
B2 |
|
|
Следует избегать такого |
сочетания |
||||
|
|
Рис. 2.5 |
|
|
размеров, |
при |
котором |
возможно |
||
|
|
|
|
особое положение. |
|
|
|
|||
|
|
|
|
|
|
|
|
|||
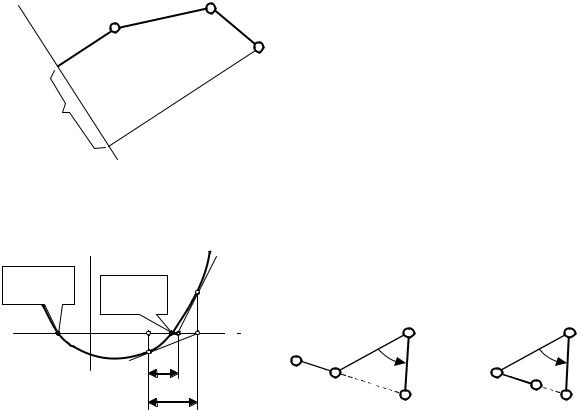
Трехподвижная платформа. |
|
|
|
|
|
|
|
|||
|
B1 |
C2 |
C1 |
|
Две разные конфигурации груп- |
|||||
|
|
q3 |
|
|||||||
А |
|
D |
пы: |
|
|
|
|
|
||
|
q3 |
|
|
|
|
|
|
|||
q1 |
|
E |
q2 |
АВСD: АВ1С1D и АВ2С2D. |
|
|||||
O |
|
B2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
Рис. 2.6
20
Решение групповых уравнений на ЭВМ
|
y |
3 M |
3 |
|
|
|
III |
Пусть одно решение групповых |
|
B |
C |
4 |
|
||||
|
|
|
|
|||||
2 |
|
|
4 |
|
II |
уравнений механизма уже получе- |
||
А |
|
2 |
q3 |
D |
|
но. |
||
|
|
|
|
|||||
|
|
|
5 |
|
Координаты, соответствующие |
|||
|
|
|
|
|
|
|
||
1 |
O |
q1 |
|
E |
q2 |
x |
этому положению, обозначим зна- |
|
|
|
|
|
|
|
|
ком (*): q1=q1*, q2=q2*, q3=q3*, 2= 2*, |
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3= 3*. |
|
|
|
Рис. 2.2 |
|
|
|
|
|
|
Дадим малые приращения входных координат q1, q2, q3. |
||||||||
Получим |
новые |
значения |
входных |
координат: q1=q1*+ q1, q2=q2*+ q2, |
||||
q3=q3*+ q3.
Тогда решение 2 и 3 будет единственным, поскольку второе положение механизма, соответствующее тем же приращениям координат q1, q2 и q3, окажется далеким от исходного положения механизма.
Определим малые приращения 2 и 3 из групповых уравнений:
xA l2 cos( 2* 2 ) l3 cos( 3* 3 ) xD l4 cos( 3* 3 q3* q3 ) 0; yA l2 sin( 2* 2 ) l3 sin( 3* 3 ) yD l4 sin( 3* 3 q3* q3 ) 0.
При этом предположим, что приращения хА, уА, хD, уD уже получены решением групповых уравнений групп I и II.
Или в обобщенной форме: |
|
|
|
|
|
|
|
|
|
F( ,ξ,q3 ) 0 , |
|
|
|
|
(2.11) |
||||
где F, ,ξ, – векторы-столбцы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xA |
|
|
|
F |
|
|
|
|
xD |
|
|
|
F |
1 |
; |
|
|
2 |
|
;ξ |
. |
|
|
F |
|
|
|
|
yA |
|
|
|
2 |
|
3 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
При этом |
|
|
|
|
|
|
yD |
|
|
|
|
|
|
|
|
|
|
|
|
F1( ,ξ,q3 ) xA l2 cos 2 |
l3 cos 3 |
xD l4 cos( 3 q3 ) ; |
|
||||||
F2 ( ,ξ,q3 ) yA l2 sin 2 l3 sin 3 |
yD l4 sin( 3 q3 ) . |
(2.12) |
|||||||
21
Мы ищем решение векторного уравнения
F( * ,ξ* ξ,q3* q3 ) 0, |
(2.13) |
Метод Ньютона или метод касательных. В соответствии с этим методом
(k+1)-е приближение для связывается с k-м приближенным соотношением
|
(k 1) |
|
(k ) |
|
F 1 |
F * |
(k ) |
,ξ* ξ,q3* |
q3 , k = 1, 2, ... . (2.14) |
|
|
|
|
|
|||||
|
|
|
|
|
k |
|
|
|
|
Доказано, что в достаточно малой окрестности исходного решения *
последовательность (2.14) сходится, причем обеспечивается квадратичная сходимость. Выражение
|
F |
|
F |
* |
(k ) |
,ξ* ξ,q3* |
q3 . |
|
|
|
|
||||
|
k |
|
|
|
|
|
представляет собой матрицу Якоби для системы (2.11).
Для рассмотренных групповых уравнений
F1( ,ξ,q3 ) xA l2 cos 2 l3 cos 3 xD l4 cos( 3 q3 ) ; F2 ( ,ξ,q3 ) yA l2 sin 2 l3 sin 3 yD l4 sin( 3 q3 ) .
F |
l2 sin 2 |
l3 sin 3 l4 sin( 3 |
q3 ) |
|||||||
|
l |
2 |
cos |
2 |
l |
cos |
l |
cos( |
q |
) . |
|
|
|
3 |
3 |
4 |
3 |
3 |
|
||
Определитель этой матрицы (якобиан) определяется выражением
det F l2 l3 sin( 3 2 ) l4 sin( 3 2 q3 ) .
(2.12)
(2.15)
(2.16)
22
C
В
D
А 
|
F |
|
|
|
|
|
|
|
det |
/ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.7 |
|
|
|
|
|
|
Побочное |
f |
|
|
|
|
|
|
|
Искомое |
|
|
|
а) |
б) |
|
||
решение |
|
|
|
|
||||
|
|
решение |
|
|
|
C |
|
C |
|
|
* |
|
А |
|
|
||
|
|
2 |
|
B |
q3 |
B |
q3 |
|
|
|
|
|
|||||
|
|
1 |
|
|
|
|
||
|
|
|
|
|
D |
А |
D |
|
|
|
|
|
|
|
|||
Рис. 2.8 |
Рис. 2.9 |
|
На рис. 2.8 дана условная геометрическая интерпретация метода Ньютона, относящаяся к случаю, когда векторы F и – одномерные.
Для того, чтобы избежать многократного вычисления матрицы F k1 ,
k1 ,
обратной матрице Якоби, можно пользоваться модифицированным методом Ньютона (методом секущих), при котором используется процедура, соответствующая формуле
|
|
|
(k 1) |
|
(k ) |
|
F 1 |
F * |
(k ) |
,ξ* ξ,q3* |
q3 , |
k = 1, 2, … . (2.17) |
|||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
* |
|
|
|
|
|
|
где |
|
F |
|
|
F |
,ξ |
, q . |
|
|
|
|
|
|||
|
|
|
|
|
|
* |
|
* |
|
3* |
|
|
|
|
|
|
|
* |
|
|
|
|
|
|
|
|
|
|
|
||
Положение механизма, близкое к исходному, не может быть получено описанным выше способом, если определитель матрицы Якоби обращается в ноль. Это – особое (сингулярное) положение группы АВСD.
23
Пример с ползунно-кривошипным механизмом. Вход q xB.
Вмеханизме две структурные группы:
однозвенная одноподвижная (ползун 3)
двухзвенная группа Ассура типа ВВВ
(звенья 1 и 2).
Такой механизм при одном значении q может принимать две различные конфигурации: ОА1В и ОА2В, причем без разборки механизма.
Составим выражения для F:
FF1( ,q) l1 cos 1 l2 cos 2 q ,
F2 ( ,q) l1 sin 1 l2 sin 2 yB
где φ 1 . Матрица Якоби:
2
F |
l1 sin 1 |
l2 sin 2 |
|
|||
|
l |
cos |
l |
cos |
2 |
. |
|
1 |
1 |
2 |
|
|
|
Определитель матрицы Якоби (якобиан):
l1l2 sin 1 cos 2 l1l2 cos 1 sin 2 l1l2 sin( 2 1) .
Отсюда видно, что якобиан обращается в 0 тогда, когда все три шарнира находятся на одной прямой (sin( 2 – 1) = 0 – особое положение группы ВВВ).
Найдем обратную матрицу:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
cos 2 |
1 |
sin 2 |
|
||||
|
F |
|
1 |
|
|
1 |
|
|
l2 cos 2 |
l2 sin 2 |
|
1 |
|
|
l1 |
l1 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
φ |
|
|
|
|
|
|
|
|
l |
cos |
l |
sin |
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|||
|
l l |
sin( |
|
) |
sin( |
|
) |
|
|
|
|
|
||||||||||||||||
|
|
|
|
1 2 |
|
2 |
1 |
|
1 |
1 |
1 |
1 |
|
|
|
2 |
1 |
|
|
|
|
cos |
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 |
1 |
|
l2 |
1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Тогда
1 (k 1)2
1 (k )2
|
|
|
|
1 |
|
k |
|
||
|
1 |
|
|
l |
cos 2 |
|
|||
|
|
|
1 |
|
|
|
|||
sin( k |
k ) |
|
1 |
cos |
k |
||||
2 |
1 |
|
|
|
|
|
|||
|
|
|
|
||||||
|
|
|
|
|
l2 |
1 |
|||
|
|
|
|
|
|
|
|
||
1 |
|
k |
|
|
|
|
|
|
|
|
|
|
l1 |
sin 2 |
|
k |
|
|
k |
q |
|||||
|
|
|
l1 cos 1 |
l2 cos 2 |
|
|||||||
|
1 |
|
k |
l |
sin k |
l |
sin k |
y |
|
|
||
|
|
|
sin |
|
1 |
1 |
2 |
2 |
|
|
B |
|
|
|
|
|
|
||||||||
|
l2 |
1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
где 1k 1* 1k , k2 2* k2 , k = 0,1,2, … . В особом положении (т.е. при sin( 2 – 1) = 0) данный метод не работает.
24
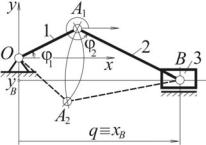
2.2. Кинематический анализ механизмов
Задачей кинематического анализа является определение скоростей и уско-
|
|
|
|
А |
|
|
|
|
|
|
|
|
рений точек механизма, угловых скоро- |
|||||||||||
y |
1 |
|
|
|
|
|
|
|
|
|
|
стей и угловых ускорений его звеньев. |
||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
Синусный механизм. |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
q |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
O |
В |
|
|
|
|
x |
|
|
|
|
|
Функция положения точки B: |
||||||||||||
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
xB 1 cos q x (q) . |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Рис. 2.10 |
|
|
|
|
|
|
|
|
|
|
Дифференцируя ее по времени, по- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
лучим скорость точки В: |
|||||||||||
|
|
|
|
|
|
|
dxB |
|
|
|
|
|
|
|
|
x q |
|
dq |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
xB |
dt |
1 sin q q |
|
q |
|
|
dt |
x q |
q . |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Продифференцировав по времени |
xB , получим ускорение точки В: |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xB |
d 2 xB |
1 cos q (q) |
2 |
1 sin q q |
|
||||||||||||
|
|
|
|
|
|
|
|
|
dt2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
2 x |
dq |
2 |
|
x (q) |
|
d 2q |
|
|
|
|
|
2 |
|
|
|||||
|
|
|
|
q2 |
|
|
|
|
q |
|
dt2 |
x |
(q) q |
x |
(q) q. |
|||||||||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
x – аналог скорости или первая геометрическая передаточная функция;
x – аналог ускорения или вторая геометрическая передаточная функция; q – обобщенная скорость; q – обобщенное ускорение.
Для одноподвижного механизма (W = 1) функция положения: |
|
|||||||
|
xМ = Пх(q),. |
|
|
|
(2.18) |
|||
Дифференцируя (2.18) по времени, получим: |
|
|
|
|||||
|
dxM |
|
x |
|
dq |
|
|
(2.19) |
xM |
dt |
q |
dt |
x q , |
||||
|
|
|
|
|
|
|||
Для определения ускорения точки М продифференцируем выражение (2.19) по времени:
|
|
d 2 xM |
|
2 x |
dq 2 |
|
x |
|
d 2q |
|
|
2 |
|
(2.20) |
||||
xM |
dt2 |
q2 |
|
|
q |
dt |
2 |
x |
(q) |
|
x q , |
|||||||
|
|
|
dt |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
2 |
. |
|
|
|
|
|
|
|
При q = const, q = 0 |
|
xM |
x |
(q) |
|
|
|
|
|
|
|
|
||||||
26