

ЭКЗ / tmm_chapter3
.pdf2.4. Геометрический анализ исполнительных механизмов промышленных роботов
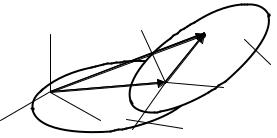
Пространственный механизм со структурой «дерева».
1 2 3
q1 
0 q2
q3
Рис. 1.11
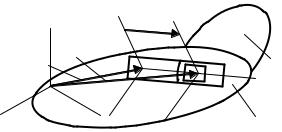
Оsxsyszs – связана со звеном s, Таблица косинусов
zs-1 |
ys |
M |
|
|
Os 1M |
|
s |
|
|
Os M |
|
|
|
Os |
xs |
Os-1 |
O O |
|
|
ys-1s 1 s |
s-1 |
|
|
xs-1 |
zs |
|
|
Рис. 2.13
Оs-1xs-1ys-1zs-1 – связана со звеном s-1
Таблица 2.1
|
xs |
ys |
xs-1 |
cos(xs-1,xs) |
cos(xs-1,ys) |
ys-1 |
cos(ys-1,xs) |
cos(ys-1,ys) |
zs-1 |
cos(zs-1,xs) |
cos(zs-1,ys) |
zs cos(xs-1,zs) cos(ys-1,zs) cos(zs-1,zs)
Обычно для краткости эти косинусы обозначают буквами (табл. 2.2):
|
|
|
Таблица 2.2 |
|
|
|
|
|
xs |
ys |
zs |
xs-1 |
11 |
12 |
13 |
ys-1 |
21 |
22 |
23 |
zs-1 |
31 |
32 |
33 |
Сумма квадратов косинусов в каждой строке равна единице, т.е.
211 + 212 + 213 = 1;221 + 222 + 223 = 1;231 + 232 + 233 = 1;
Сумма попарных произведений равна 0, т.е.
11 21+ 12 22 + 13 23 = 0;21 31+ 22 32 + 23 33 = 0;11 31+ 12 32 + 13 33 = 0.
33
zs-1 |
ys |
M |
|
|
Os 1M |
|
s |
|
|
Os M |
|
|
|
Os |
xs |
Os-1 |
O O |
|
|
ys-1s 1 s |
s-1 |
|
|
xs-1 |
zs |
|
|
Рис. 2.13
Матрица направляющих косинусов Аs-1,s
|
|
11 |
12 |
13 |
|
|
|||
A |
|
|
21 |
|
22 |
|
23 |
. |
(2.39) |
s 1,s |
|
|
|
|
|
|
|||
|
|
31 |
32 |
33 |
|
|
|||
|
|
s 1,s |
|
||||||
Аs-1,s+1 = Аs-1,s Аs,s+1 . |
|
|
|
(2.40) |
|||||
Os 1M Os 1Os OsM . |
(2.41) |
||||||||
x(s 1)
M
Вектор Os 1M в (s–1)-й системе координат: rM(s 1) yM(s 1) .
zM(s 1)
xM(s)
Вектор OsM в s-й системе координат: rM(s) yM(s) .
zM(s)
|
|
|
|
|
(s 1) |
|
Вектор O |
O |
в (s–1)-й системе координат: |
r(s 1) |
x0s |
|
|
y(s 1) |
. |
|||||
|
s 1 s |
|
0s |
|
0s |
|
|
|
|
|
|
||
|
|
|
|
z(s 1) |
|
|
|
|
|
|
|
0s |
|
(2.42)
(2.43)
(2.44)
Выражение (2.41) в проекциях на оси (s–1)-й системы координат:
rM(s 1) r0(ss 1) As 1,srM(s) .
Четырехмерные векторы-столбцы координат:
|
|
(s 1) |
|
|
(s) |
|
|
xM |
|
xM |
|
||
|
y(s 1) |
|
y(s) |
|||
R(Ms 1) |
|
M |
|
, R(Ms) |
M |
. |
|
zM(s 1) |
|
zM(s) |
|
||
|
|
1 |
|
|
1 |
|
|
|
|
|
|
||
(2.45)
(2.46)
Блочные матрицы 4х4 (матрицами перехода от s-й системы координат к (s– 1)-й системе):
|
|
|
|
11 |
12 |
13 |
(s 1) |
|
|
|
|
|
|
|
|
|||
|
|
|
|
x0s |
|
|
|
As 1,s |
|
r0(ss 1) |
|
|||||||
|
|
|
|
|
|
|
|
|
|
y(s 1) |
|
|
|
|
||||
H |
s 1,s |
|
|
|
21 |
|
22 |
|
23 |
0s |
|
|
|
|
|
|
. |
(2.47) |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
(s 1) |
|
0 0 0 |
|
1 |
|
|
||||
|
|
|
|
31 |
32 |
33 |
z0s |
|
|
|
|
|
||||||
|
|
|
|
0 |
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
34

Вместо
r(s 1) |
r(s 1) |
A |
r(s) . |
(2.45) |
||
M |
0s |
|
s 1,s |
M |
|
|
записываем |
|
|
|
|
|
|
R(Ms 1) Hs 1,sR(Ms) , |
|
|
|
(2.48) |
||
R(Ms 2) Hs 2,s 1 R(Ms 1) |
Hs 2,s 1 Hs 1,s R(Ms) , |
|||||
|
||||||
Перемножая последовательно матрицы перехода, можно дойти до неподвижной системы координат:
|
|
|
R(0) |
H |
|
H |
|
...H |
|
...H |
|
|
(n) H |
|
R(n) . |
(2.49) |
|
|
|
|
01 |
12 |
s 1,s |
R |
0n |
||||||||||
|
|
|
M |
|
|
|
|
n 1,n M |
|
M |
|
||||||
|
|
|
ys |
|
|
|
|
|
|
|
R(Mn) |
– вектор-столбец координат |
|||||
zs-1 |
|
|
|
|
M |
|
|
точки М в системе, связанной со звеном |
|||||||||
|
|
|
|
|
|||||||||||||
|
|
|
Os 1M |
|
|
s |
n, |
|
|
|
|
||||||
|
|
|
|
Os M |
|
|
|
R(0)M |
– |
вектор-столбец |
координат |
||||||
|
|
|
|
Os |
|
|
xs |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Os-1 |
O O |
|
|
|
|
|
|
точки М в неподвижной системе. |
|||||||||
ys-1s 1 s |
s-1 |
|
|
|
|||||||||||||
xs-1 |
zs |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Рис. 2.13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Матрица перехода во вращательной кинематической паре.
ys ys*
zs-1
|
|
|
s |
|
|
Os |
xs |
Os-1 |
O O |
qs |
|
ys-1s 1 s |
zs,zs* |
xs* |
|
xs-1 |
|
s-1 |
Рис.2.14
qs – угол поворота s-го звена относительно (s–1)-го.
Ozs совпадает с осью вращения во вращательной КП.
Os*хs*уs*zs* – начальное положение
Osхsуszs (при qs=0).
Матрица направляющих косинусов Аs-1,s : |
|
As 1,s (qs ) As 1,s* (0) As*,s (qs ) . |
(2.50) |
Матрица Аs-1,s*(0) является постоянной.
35
Составим таблицу направляющих косинусов для As*,s(qs) .
|
|
|
Таблица 2.3 |
|
xs |
ys |
zs |
xs* |
cos(qs) |
cos(qs+ /2) |
cos( /2) |
ys* |
cos(3 /2+qs) |
cos(qs) |
cos( /2) |
zs* |
cos( /2) |
cos( /2) |
cos(0) |
Тогда матрица Аs*,s(qs) равна:
|
|
|
cos qs |
sin qs |
0 |
|
|
|
|
|
|||
A |
(q |
s |
) sin q |
s |
cos q |
s |
0 |
|
P (q |
s |
) . |
(2.51) |
|
s*,s |
|
|
|
|
|
|
z |
|
|
||||
|
|
|
|
0 |
|
0 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Матрица Pz(qs) называется матрицей поворота.
Матрица перехода во вращательной кинематической паре:
|
|
As 1,s* (0) |
Pz (qs ) |
|
(s 1) |
|
|
|
|
|
|||||
H B |
|
|
r0s |
. |
(2.52) |
||
0 0 |
0 |
|
1 |
||||
s 1,s |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Матрица перехода в поступательной кинематической паре.
|
ys* |
|
|
|
|
qs – |
поступательное перемещение |
|
zs-1 |
|
qs |
ys |
|
звена s относительно звена (s–1). |
|||
|
|
|
|
|
|
|
||
|
Os 1Os |
|
|
|
s |
Oхs совпадает с линией относитель- |
||
Os 1O*s |
|
|
|
|
||||
Os-1 ys-1 |
|
Os* |
Os |
xs, xs* ного перемещения звеньев s и (s–1). |
||||
z |
* |
|
s-1 |
* * * * |
– начальное положение |
|||
xs-1 |
|
s |
zs |
|
Os хs |
уs zs |
||
|
Рис. 2.15 |
|
|
Osхsуszs (при qs=0). |
||||
|
|
|
|
|
|
|||
r0(ss 1) (qs ) r0(ss*1) (0) As 1,s*r0(ss*)
|
11 |
12 |
13 qs |
|
|
|
|
|
|
|
11 |
|
(2.53) |
||||||||||||
r(s 1) |
(0) |
|
|
|
|
|
|
|
|
0 |
|
r(s 1) |
(0) q |
|
|
|
|
|
. |
||||||
21 |
22 |
|
|
21 |
|
||||||||||||||||||||
0s* |
|
|
|
|
|
23 |
|
|
|
|
0s* |
|
|
|
|
s |
|
|
|
||||||
|
|
31 |
32 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
31 |
|
|
|||||
|
|
33 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
П |
|
|
|
|
|
|
A |
|
|
r(s 1) (0) q |
|
|
21 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
s 1,s |
|
|
0s* |
|
s |
|
|
|
. |
|
|
(2.54) |
||||||
|
Hs 1,s (qs ) |
|
|
|
|
|
|
|
|
|
|
|
31 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
36

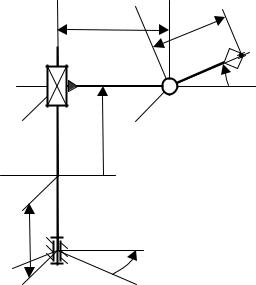
Пример. |
|
|
|
|
Степень подвижности: |
|
|
|
|
||||||
z0,z1,z1*,x2,x2* |
y3* |
|
|
|
|
|
|
||||||||
|
b |
y3 |
|
|
W=6 3-5 3=3. |
|
|
|
|
|
|
||||
|
c |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обобщенные координаты: |
|
||||||||||
|
|
|
x3 |
|
|||||||||||
|
O2 |
|
q1, q2, q3. |
|
|
|
|
|
|
|
|
||||
y2 |
|
q3 |
* |
|
|
|
|
|
|
|
|
||||
|
O3 |
|
|
|
|
|
|
|
|
|
|
|
|
||
z2 |
|
|
x3 |
O1x1y1z1, O2x2y2z2, O3x3y3z3 – связа- |
|||||||||||
q2 |
z3,z3* |
|
|
||||||||||||
|
|
ны с 1,2,3 звеньями соответственно. |
|||||||||||||
|
|
|
|
|
|||||||||||
y2* |
O*2 |
|
|
|
Начальные положения каждой из |
||||||||||
|
|
|
|
|
|||||||||||
* |
|
|
|
|
систем координат: |
|
|
|
|
|
|
||||
z2 |
O1 |
|
|
|
O1*x1*y1*z1*, O2*x2*y2*z2*, O3*x3*y3*z3*. |
||||||||||
a |
y1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O1*x1*y1*z1* |
совпадает |
|
с |
|
непод- |
|||||||
x0x1* |
|
q1 |
|
|
|
|
|||||||||
|
|
|
вижной системой Ox0y0z0. |
|
|
|
|
||||||||
y0,y1* |
|
|
|
|
|
|
|||||||||
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 2.16 |
|
|
|
a, b, c – конструктивные параметры. |
|||||||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
(0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xM |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
y(0) |
|
|
|
|
|
|
|
|
||
Построить функцию положения точки М: R(0)M |
M |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
zM(0) |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Решение. |
|
|
|
|
|
|
|
|
xM(3) |
|
|
|
|
|
|
z0,z1,z1*,x2,x2* |
y3* |
|
|
|
|
|
|
с |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|||
|
|
y3 |
|
|
|
|
|
(3) |
yM(3) |
|
|
|
|
||
|
b |
c |
|
M |
|
|
RM |
|
(3) |
|
|
0 |
. |
|
|
|
|
|
|
x3 |
|
|
|
|
zM |
|
|
|
|
||
|
O2 |
|
|
|
|
|
|
|
1 |
|
1 |
|
|||
y2 |
|
|
q3 |
|
|
|
|
|
|
|
|||||
|
O3 |
|
* |
|
|
|
|
|
|
|
|
|
|
|
|
z2 |
|
|
x3 |
|
|
|
|
|
|
|
|
|
|
|
|
q2 |
z3,z3* |
|
|
R(0) H B |
(q )H П (q )H B |
(q )R(3) . |
|||||||||
|
|
|
|
|
|||||||||||
y2* |
O*2 |
|
|
|
M |
01 |
1 |
12 |
2 |
23 |
|
3 |
M |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
z2* |
O1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
y1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x0x1* |
|
q1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y0,y1* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
37 |
|
Рис. 2.16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Составим матрицы перехода. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
H B |
|
A |
|
(0) P (q ) |
|
r(0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
01* |
|
|
z |
1 |
|
01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
01 |
|
|
0 |
0 |
0 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
|
0 |
cos q1 |
|
sin q1 |
0 |
|
0 |
cos q |
sin q |
0 |
0 |
|
||||||||||||
|
|
|
|
|||||||||||||||||||||||||
|
0 |
1 |
|
0 |
sin q |
|
cos q |
|
0 |
|
0 |
|
|
1 |
1 |
|
|
|
||||||||||
|
|
|
|
|
sin q |
cos q |
0 |
0 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
||||||||
|
|
0 |
0 1 |
|
0 |
|
0 |
|
|
|
|
|
0 |
|
0 |
|
0 |
1 0 |
||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
0 0 0 |
|
|
|
|
|
|
1 |
|
0 |
|
0 |
0 1 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Для составления матрицы А12 построим табл. 2.4 направляющих косинусов: |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
y2 |
|
|
|
|
|
z2 |
||
x1 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
1 |
||
y1 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
–1 |
|
|
|
|
|
0 |
||
z1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
||
Тогда матрица перехода |
H |
(q ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
12 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
1 |
|
0 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
1 0 |
|
0 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
H |
П |
(q ) |
|
|
. |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
12 |
2 |
|
|
1 |
0 |
0 |
a q2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|
|
1 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для построения матрицы А23*(0) составим табл. 2.5 направляющих косинусов: Таблица 2.5
|
|
|
|
|
|
|
|
|
|
|
x3* |
|
|
|
|
|
|
|
|
y3* |
|
|
z3* |
||
|
|
x2 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
1 |
|
|
0 |
|
|||
|
|
y2 |
|
|
|
|
|
|
|
–1 |
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
z2 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
|
1 |
|
|||
Найдем матрицу перехода НB |
(q ) : |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
23 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
H B |
|
|
A23*(0) Pz (q3 ) |
|
|
(2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
r03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
23 |
|
|
0 |
|
0 |
0 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
1 |
0 |
cos q3 |
|
|
sin q3 |
0 |
|
|
0 |
|
sin q |
cos q |
0 |
0 |
|
||||||
|
|
|
|
|
|||||||||||||||||||||
|
1 |
0 |
0 |
sin q |
|
|
cos q |
0 |
|
b |
|
3 |
3 |
|
|
|
|||||||||
|
|
|
|
cos q |
sin q |
0 |
b |
||||||||||||||||||
|
|
|
|
|
|
|
|
3 |
|
|
|
|
3 |
|
|
|
|
|
|
|
. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
3 |
|
|
|||||||
|
|
0 |
|
0 1 |
|
0 |
|
|
|
0 |
|
1 |
|
|
0 |
|
0 |
0 |
1 0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
0 0 |
0 |
|
|
|
|
|
|
1 |
|
|
0 |
0 |
0 1 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
38

Подставляя найденные матрицы перехода, получим:
|
cos q1 |
sin q1 |
0 |
0 |
|
0 |
0 |
1 |
0 |
|
sin q3 |
cos q3 |
0 |
0 |
c |
|
||
R(0) |
sin q |
cos q |
0 |
0 |
|
0 |
1 |
0 |
0 |
|
cos q |
sin q |
0 |
b |
0 |
|
||
|
1 |
1 |
|
|
|
|
|
|
|
|
3 |
3 |
|
|
|
|
. |
|
M |
|
0 |
0 |
1 |
0 |
|
1 |
0 |
0 |
a q2 |
|
0 |
0 |
1 |
0 |
|
0 |
|
|
|
|
|
|
|
|||||||||||||
|
|
0 |
0 |
0 |
1 |
|
0 |
0 |
0 |
1 |
|
0 |
0 |
0 |
1 |
|
1 |
|
2.5. Кинематический анализ исполнительных механизмов промышленных роботов
Задачей кинематического анализа является определение скоростей и ускорений точек механизма и угловых скоростей и угловых ускорений его звеньев.
|
|
|
|
(0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xM |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(0) |
(0) |
|
|
(0) |
|
Hon |
|
|
|
|
|
Hon |
|
|
|
Hon |
|
||||||||
yM |
|
q1 |
q2 |
... |
qn R |
||||||||||||||||||||
VM |
RM |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
(0) |
|
|
|
|
q |
|
|
|
|
|
q |
|
|
|
|
q |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|||||||||
|
|
zM |
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
(0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
xM |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(0) |
|
n n |
|
|
2 |
Hon |
|
|
n |
Hon |
|
|
|
|
|||||||||
(0) |
(0) |
|
|
|
|
|
|
|
(n) |
||||||||||||||||
yM |
|
|
|
|
qsql |
|
|
|
|||||||||||||||||
WM |
VM |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qs |
RM |
||||||||
|
|
|
|
(0) |
|
|
|
|
q |
q |
|
|
|
q |
|
|
|
|
|||||||
|
|
|
|
|
s 1 l 1 |
|
|
|
s 1 |
s |
|
|
|
||||||||||||
|
|
zM |
|
|
|
|
|
s |
|
l |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(n)
M
n Hon q R(n) (2.55)
s 1 qs s M
(2.56)
В выражения (2.55) и (2.56) входят первые и вторые частные производные от матриц перехода.
39
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
HsB 1,s |
|
|
|
|
|
|
|
|
|
As 1,s* (0) P (qs ) |
0 |
|
|
|||||||||||||||
|
|
|
|
|
|
(q |
s |
) |
|
|
, |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
qs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
0 |
|
|
0 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
sin qs |
cos qs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где |
|
cos qs |
sin qs |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
P (qs ) |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
0 |
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
2 HsB 1,s |
|
|
|
|
|
|
|
|
|
|
|
P (qs ) |
|
|
|
|
|
|
|||||||||||
|
|
|
|
(q |
s |
) As 1,s* (0) |
|
|
0 |
|
, |
||||||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|||||||||
|
|
|
|
|
qs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
0 |
|
|
|
|
0 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
cos qs |
|
|
sin qs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где |
|
sin qs |
|
cos qs |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
P (qs ) |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
0 |
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
П |
|
|
|
|
|
|
0 |
|
0 |
|
0 |
|
11 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
Hs 1,s |
(q |
s |
) |
|
|
|
21 |
|
= const . |
|||||||||||||||||||
|
|
|
|
|
|
|
0 0 0 |
31 |
|||||||||||||||||||||||||
|
|
|
|
|
qs |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
|
0 |
0 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
2 |
|
|
|
П |
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Hs 1,s |
(q |
|
) |
|
|
|
|
. |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
qs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Определение угловых скоростей.
Ωm Ωm 1 ωm , m=1, … n.
(2.57)
(2.58)
(2.59)
(2.60)
(2.61)
Ωm ,Ωm 1 – вектора угловых скоростей в неподвижной системе координат, ωm – вектор относительной угловой скорости звена m относительно (m–1).
|
|
mx |
|
|
|
(m 1) x |
|
mx |
0 |
|||||||||
|
|
|
|
(m) |
|
|
|
|
(m) |
|
|
|
(m) |
|
|
|
|
|
|
(m) |
|
(m) |
|
, |
(m) |
|
(m) |
|
(m) |
|
(m) |
|
|
0 |
|
||
|
Ωm |
|
my |
|
Ωm 1 |
|
(m 1) y , ωm |
|
my |
|
|
. |
||||||
|
|
|
(m) |
|
|
|
|
(m) |
|
|
|
(m) |
|
|
q |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
mz |
|
|
(m 1) z |
|
mz |
|
|
m |
||||||||
|
|
|
|
|
|
|||||||||||||
В проекциях на оси (m–1)-й системы координат: |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
Ω(mm) Ω(mm)1 ω(mm) . |
|
|
|
|
|
|
|
||||
Ω(m 1) |
A |
|
Ω(m) . Отсюда Ω(m) A 1 |
Ω(m 1) . |
|
|
|
|
|
|||||||||
m 1 |
m 1,m |
|
m 1 |
|
|
|
|
m 1 |
m 1,m |
m 1 |
|
|
|
|
|
|
||
|
|
|
|
Ω(m) A 1 |
Ω(m 1) |
ω(m) |
, m=1, … n. |
|
|
|
|
|||||||
|
|
|
|
m |
|
m 1,m |
|
m 1 |
m |
|
|
|
|
|
|
|
|
|
(2.62)
(2.63)
(2.64)
(2.65)
40
Определения угловых ускорений. |
|
|
|
dωm dωm |
Ωm ωm . |
(2.66) |
|
dt |
dt |
|
|
dωm  dt – абсолютная производная по времени от вектора,
dt – абсолютная производная по времени от вектора,
dωm  dt – относительная производная по времени от вектора.
dt – относительная производная по времени от вектора.
продифференцируем (2.61) по времени. При этом учтем, что абсолютная производная по времени от вектора dωm  dt равна геометрической сумме отно-
dt равна геометрической сумме отно-
сительной производной того же вектора dωm  dt и векторного произведения вектора угловой скорости вращения относительной системы координат Ωm на дифференцируемый вектор:
dt и векторного произведения вектора угловой скорости вращения относительной системы координат Ωm на дифференцируемый вектор:
dωm dωm Ωm ωm . |
(2.66) |
dt dt |
|
Em Em 1 Ωm ωm εm . |
(2.67) |
В проекциях на оси (m–1)-й системы координат:
E(m) A 1 |
E(m 1) |
Ω(m) ω(m) ε(m) , m=1, … , n . |
(2.68) |
||
m |
m 1,m |
m 1 |
m |
m m |
|
0
ε(mm) 0 .q
В соответствии с условленным ранее правилом выбора осей локальной системы координат во вращательной кинематической паре вектор-столбец проекций углового ускорения на оси m-й системы координат представляет собой:
0 ε(mm) 0 .
q
Проецируя (2.67) на оси m-й системы координат и используя соотношение E(mm)1 Am11,m E(mm 11) , получим следующее выражение для рекуррентной процедуры отыскания угловых ускорений:
E(m) A 1 |
E(m 1) |
Ω(m) ω(m) ε(m) , m=1, … , n . |
(2.68) |
||
m |
m 1,m |
m 1 |
m |
m m |
|
41
Пример определения угловых скоростей и ускорений. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
z0,z1,z1*,x2,x2* |
|
y3* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
b |
y3 |
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|||
|
|
|
|
|
|
|
|
x3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
O2 |
|
|
|
|
|
|
ω(1) |
|
|
0 |
|
;ω(2) |
|
0 |
|
;ω(3) |
|
|
0 |
|
; |
|||||||||
|
|
|
|
|
|
q3 |
|
|
|
|||||||||||||||||||||||
y2 |
|
|
|
|
|
|
|
x3* |
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|||||||
z2 |
|
q2 |
z3,z3* |
|
|
|
|
|
|
|
|
|
q1 |
|
|
|
|
|
q3 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
0 |
|
|||||||||||||||
|
y2* |
O*2 |
|
|
|
|
|
|
|
|
|
|
ε1(1) |
0 ;ε(2)2 0 |
;ε3(3) 0 |
. |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|||||||
z2* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q1 |
|
|
|
q3 |
|
||||||||||||
O1 |
|
|
|
|
|
|
|
|
|
|
Угловые скорости m = 1,2,3: |
|
|
|
||||||||||||||||||
|
a |
|
|
y1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
* |
|
|
q1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
x0x1 x1 |
|
|
y0,y1* |
|
|
|
|
|
|
|
(1) |
|
|
1 |
(0) |
|
(1) |
|
|
(1) |
|
0 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
Ω1 |
|
A0,1Ω0 |
ω1 |
|
|
ω1 |
|
; |
|
|||||||||||
|
Рис. 2.16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q1 |
|
||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
|
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
(2) |
|
1 |
|
(1) |
(2) |
|
0 |
|
1 |
0 |
|
0 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Ω2 |
A1,2Ω1 ω2 |
|
|
|
|
0 |
; |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
0 q1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
sin q |
cos q |
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
q |
|
q sin q |
|
|
|
|
|
||||||||||||||||||
|
(3) |
1 |
(2) |
|
(3) |
|
|
3 |
sin q3 |
3 |
0 |
|
1 |
|
|
0 |
|
|
1 |
3 |
|
|
|
|
|
|
||||||
|
Ω3 A2,3Ω2 ω3 |
cos q3 |
|
|
0 |
|
|
|
q1 cos q3 |
. |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
|
|
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
q3 |
|
|
|
q3 |
|
|
|
|
|
||||||||||||
Угловые ускорения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
E1(1) A0,11E(0)0 |
Ω1(1) ω1(1) |
ε1(1) |
ε1(1) |
0 |
; |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q1 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
|
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
||||||||||||
|
|
(2) |
1 |
(1) |
|
(2) |
(2) |
|
(2) |
|
|
0 |
1 |
|
0 |
|
0 |
|
|
|
1 |
|
|
|
|
|
|
|
||||
|
|
E2 |
A1,2E1 Ω2 ω2 |
ε2 |
|
|
|
|
0 |
; |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
||||||
E(3) |
A 1E(2) Ω(3) |
|
ω(3) |
ε(3) |
|
|
|
|
0 0 q1 |
|
|
|
|
|
|
|||||||||||||||||
3 |
2,3 |
2 |
3 |
|
3 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin q3 |
cos q3 |
0 |
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
q1 |
q1 sin q3 |
|
q1 sin q3 |
q1q3 cos q3 |
|
|||||||||||||||||||||||||||
|
|
sin q3 |
0 |
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
cos q3 |
0 |
|
q1 cos q3 |
|
|
q1 cos q3 |
|
q1q3 sin q3 . |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
0 |
1 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
q3 |
q3 |
q3 |
|
|
|
|
|
|
q3 |
|
|
|
|
|
||||||||||||||||||
42