

Отработка третьим каналом линейно нарастающего воздействия при
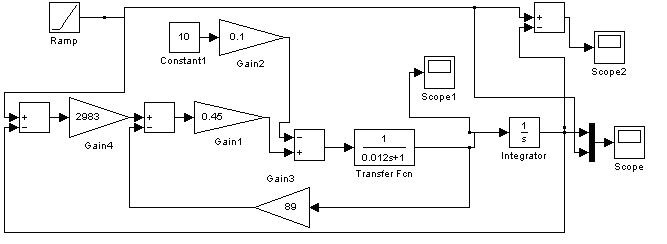
Рисунок 55 -Схема моделирования третьего канала
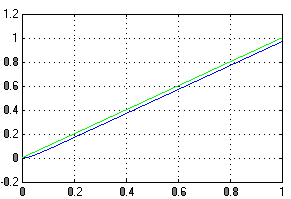
Рисунок 56 -Переходной процесс в системе
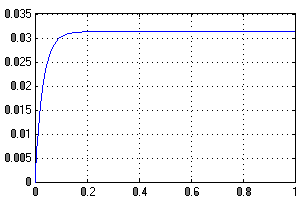
Рисунок 57 - Ошибка
Отработка третьим каналом воздействия с постоянным ускорением при
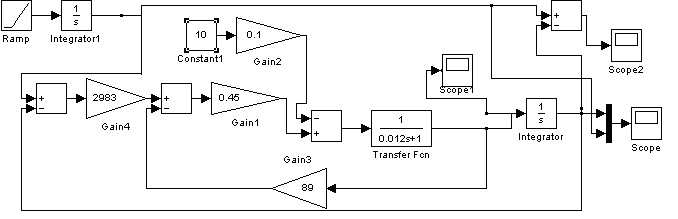
Рисунок 58 -Схема моделирования третьего канала
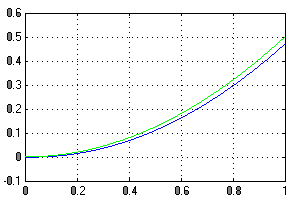
Рисунок 59 - Переходной процесс в системе
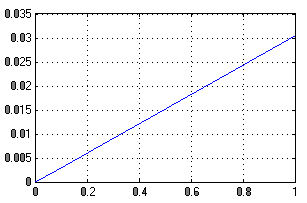
Рисунок 60 - Ошибка
Вывод: моделирование показало, что синтезированная система управления для каждого канала удовлетворяет требуемым показателям качества.
Циклограмма работы первого канала
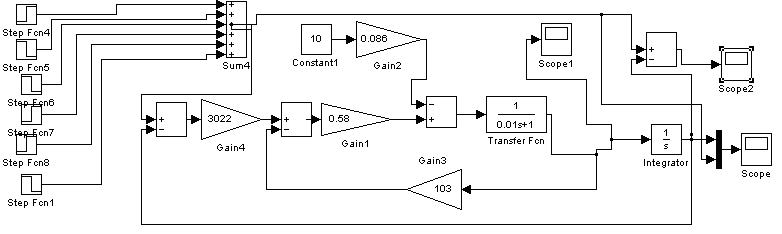
Рисунок 61 - Схема моделирования первого канала
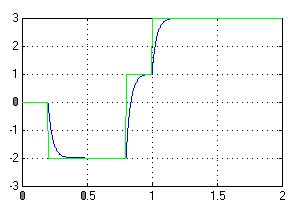
Рисунок 62 - Циклограмма работы первого канал
Циклограмма работы второго канала
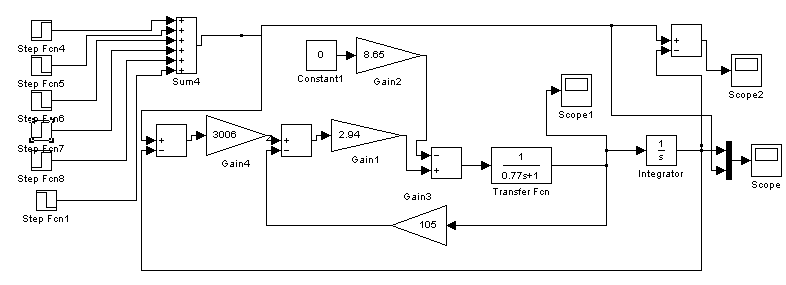
Рисунок 63 - Схема моделирования второго канала
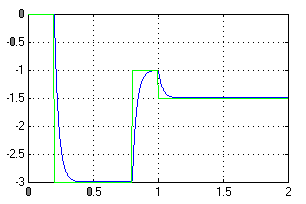
Рисунок 64 - Циклограмма работы второго канала
Циклограмма работы третьего канала
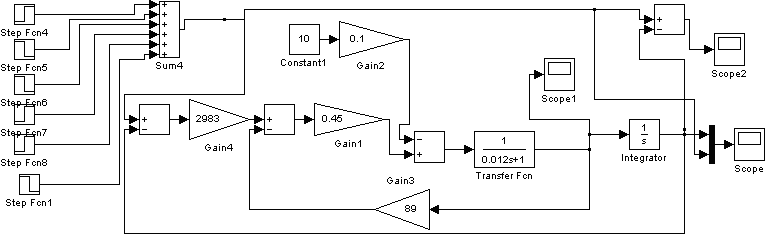
Рисунок 65 - Схема моделирования третьего канала

Рисунок 66 - Циклограмма работы третьего канала
Прямая задача кинематики
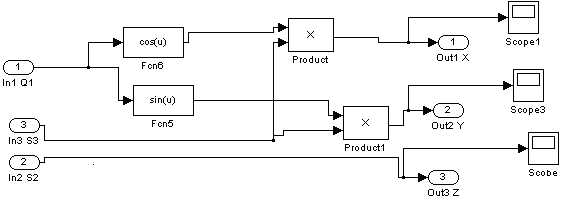
Рисунок 67 - Схема моделирования матрицы Rcx (решение прямой задачи)
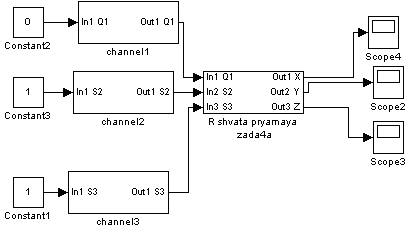
Рисунок 68 - Прямая задача кинематики
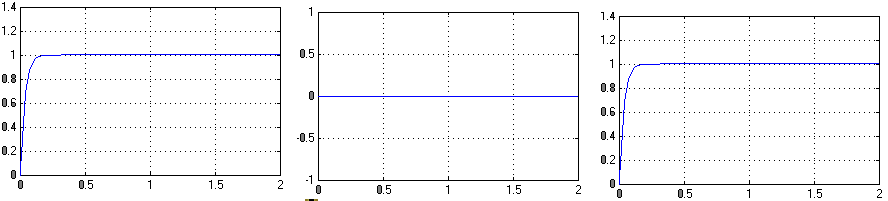
Рисунок 69 - Координаты х,y,z
Обратная задача кинематики
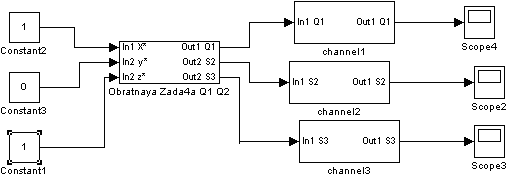
Рисунок 70 - Обратная задача кинематики
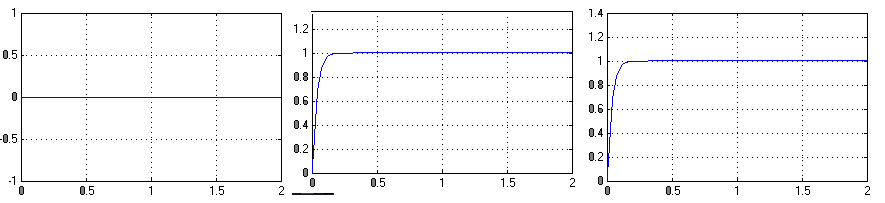
Рисунок 71 - Q1,S2,S3
Отработка циклограммы. Траектория движения.
Зададим поведение робота следующим образом (см. таблицу 1):
Таблица 1 – Заданная циклограмма
№ шага |
|
|
|
1 |
0 |
1 |
1 |
2 |
|
0.5 |
0.5 |
3 |
|
0 |
0 |
4 |
|
0.5 |
0.5 |
5 |
0 |
0.7 |
0.9 |
Таблица 2 – Координаты робота-манипулятора
№ шага |
x |
y |
z |
1 |
1 |
0 |
1 |
2 |
0 |
0.5 |
0.5 |
3 |
0 |
0 |
0 |
04 |
0 |
-0.5 |
0.5 |
5 |
0.9 |
0 |
0.7 |
На рисунке 72 представлена траектория движения манипулятора по трём координатам (x,y,z), в соответствии с пятью последовательными изменениями положения в пространстве этого манипулятора (в соответствии с циклограммой):
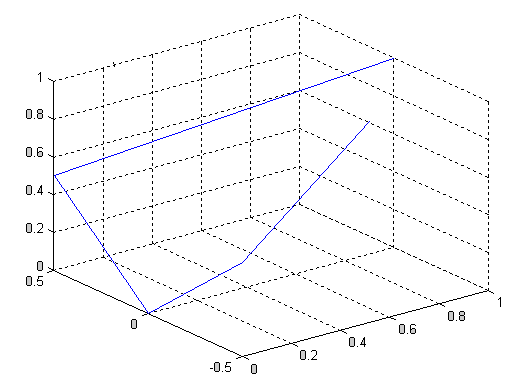
Рисунок 72 - Траектория движения схвата манипулятора по заданной циклограмме
Вывод: были рассчитаны параметры робота-манипулятора. Произведен расчет математической модели системы управления каналами робота. Проанализирован астатизм системы.