

Построение блочных матриц
 ;
; ;
;
;
; ;
;
 ;
; ;
;
 ;
; ;
;
![]() ;
;
![]() ;
;![]() ;
;![]()
 ;
;


 ;
;
![]() ;
;
;
;
 ;
;
 ;
;
;
;
 ;
;
![]()
![]() ;
;
 ;
;
![]()
Свяжем
с каждым из звеньев манипулятора правую
систему координат
![]() таким образом, чтобы начало координат
этой системы совпадало с центром масс
таким образом, чтобы начало координат
этой системы совпадало с центром масс
![]() - го звена, а оси были параллельны осям
системы координат
- го звена, а оси были параллельны осям
системы координат
![]() .
.
Положение
центра масс
- го звена в системе
определяется вектором
![]() .
.
Будем
считать, что
![]() .
.
Тогда
 ;
;
 ;
;
![]() ;
;
4.2 Определение массы звеньев
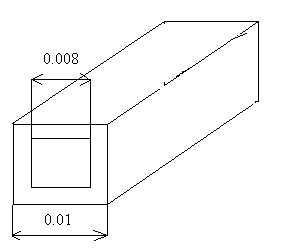
Рисунок 5 – Форма звеньев манипулятора
Определим массу звеньев
![]()
![]()
![]() ;
;
1)
![]() ;
;
![]() м;
м;
![]() м;
м;
![]() м;
м;
![]() 0.168
кг,
0.168
кг,
2)
![]() ;
;
![]() м;
м;
![]() м;
м;
![]() м;
м;
![]() 0.168
кг,
0.168
кг,
3)
![]() ;
;
![]() м;
м;
![]() м;
м;
![]() м;
м;
![]() 0.336кг
0.336кг
4.3 Определение моментов инерции звеньев
Первое звено:
![]() =
=![]() =0.008*0.008*0.6*7800=0.299
=0.008*0.008*0.6*7800=0.299
![]() =
=
0.005
![]() ;
;
![]() =
=
0.0000045 ;
Второе звено:

![]() 0.0000045
.
0.0000045
.
Третье звено:

![]() 0.000009
.
0.000009
.
![]() ;
;
Программа для вычисления в матлабе
m=[diag([0.168,0.168,0.168,0.168,0.168,0.168,0.336,0.336,0.336,])]
t=[1 0 0 0 0 0 0 0 0;0 1 0 0 0 0 0 0 0;0 0 1 0 0 0 0 0 0;0 1 0 1 0 0 0 0 0;0 0 1 0 1 0 0 0 0;1 0 0 0 0 1 0 0 0;1 0 0 1 0 0 1 0 0;0 0 1 0 1 0 0 1 0 ;0 -1 0 0 0 1 0 0 1]
S3=sym('S3')
S2=sym('S2')
l=[0 0 0 0 0 0 0 0 0;0 0 0 0 0 0 0 0 0;0 0 0 0 0 0 0 0 0;0 0 0 0 0 S2 0 0 0 ;0 0 0 0 0 0 0 0 0;0 0 0 (-S2) 0 0 0 0 0;0 0 0 0 0 0 0 (-S3) 0; 0 0 0 0 0 0 S3 0 0;0 0 0 0 0 0 0 0 0]
R=l/2
I=[diag([0.005,0.005,0.0000045,0.014,0.014,0.0000045,0.0279,00279,0.000009])]
Io=I+(t*l+R)'*m*(t*l+R)
Q1=sym('Q1')
Q2=sym('Q2')
t0=[cos(Q1) sin(Q1) 0 0 0 0 0 0 0; -sin(Q1) cos(Q1) 0 0 0 0 0 0 0;0 0 1 0 0 0 0 0 0; 0 0 0 -sin(Q1) cos(Q1) 0 0 0 0;0 0 0 0 0 1 0 0 0; 0 0 0 cos(Q1) sin(Q1) 0 0 0 0; 0 0 0 0 0 0 -sin(Q1) cos(Q1) 0;0 0 0 0 0 0 0 0 1;0 0 0 0 0 0 cos(Q1) sin(Q1) 0]
v=[0 0 0;0 0 0;1 0 0;0 0 0;0 1 0;0 0 0;0 0 0;0 0 0;0 0 1;]
E=[1 0 0;0 1 0; 0 0 1]
sig=[1 0 0;0 0 0; 0 0 0]
A=sig'*v'*t'*Io*t*v*sig-sig'*v'*t'*(l'*t'+R')*m*t*v*(E-sig)-(E-sig)'*v'*t'*m*(t*l+R)*t*v*sig+(E-sig)'*v'*t'*m*t*v*(E-sig)
D=(-sig)'*v'*t'*(R+t*l)'*t0+(E-sig)'*v'*t'*t0
Вычисление матрицы А(q)
![]()
 ;
;
Проверка :
При S3=1
а11= 0.7979
a22=m2+m3=0.504
a33=m3=0.336
Найдем максимальные значения коэффициентов матрицы А
а11= 0.015+1.088=0.7979
a22 =0.504
a33=m3=0.336
Вычисление матрицы D(q)
![]() ;
;

Матрица D с максимальными значениями коэффициентов:
![]()
Вектор
сил тяжести:![]() .
.
Задав
 ,
можно найти константы
,
можно найти константы
Выбор двигателей.
Расчет привода.
Зададим
угловые скорость и ускорение нагрузки:
![]()
![]() ;
;![]() ;
;
![]()
![]() .
.
1) Первый канал системы:
Требуемая
мощность:
![]()
![]() =19.85
Вт
=19.85
Вт
![]()
2) Второй канал системы:
Требуемая
мощность:
![]()
![]() =
46.13 Вт
=
46.13 Вт
![]()
3) Третий канал системы:
Требуемая
мощность:
![]()
![]() =
35.87 Вт
=
35.87 Вт
![]()
Выбор двигателей
Произведем
выбор двигателей, обеспечивая соотношение:
![]()
1) Для первого канала выберем двигатель BLDC Motor -150004 следующими техническими данными:
![]() 13.8 В;
13.8 В;
P= 43 Вт;
N=3770 об / мин (394.5 рад/с);
![]() 0.139
0.139
![]() ;
;
![]() 3.31
A;
3.31
A;
![]() 0.25
Ом;
0.25
Ом;
![]()
![]()
2) Для второго канала выберем двигатель EC-PowerMax 30 Series – 309755 со следующими техническими данными:
18В;
P= 100Вт;
N=25000 об / мин (2616.6 рад/с);
0.0762 ;
8.36 A;
0.6 Ом;
![]()
3 ) Для третьего канала выберем двигатель F 2260 Series -- 2260.882-51.216-200 со следующими техническими данными:
![]() 18
В;
18
В;
P= 80 Вт;
N=4000 об / мин (418.6 рад/с);
0.25 ;
4.31 A;
0.5 Ом;
![]()
![]() ;
;
 ;
;
![]()
1) Для первого канала:
Выберем передаточное число редуктора из следующих условий:
 .
.
Подставляя численные значения, получаем:
![]() .
.
Выберем i =50.
![]()
![]() .
.
![]()
![]()
![]() ;
;
![]()
Суммарный
момент инерции, приведенный к валу
двигателя:
 ,
,
где
![]() - момент инерции двигателя;
- момент инерции двигателя;
![]() - момент
инерции редуктора;
- момент
инерции редуктора;
![]()
![]() ;
;
![]() =0.01
(c).
=0.01
(c).
2) Для второго канала:
Выберем передаточное число редуктора из следующих условий:
 .
.
Подставляя численные значения, получаем:
![]() .
.
Выберем i =50.
![]() .
.
![]()
![]() ;
;
![]()
Суммарный момент инерции, приведенный к валу двигателя: ,
где - момент инерции двигателя;
- момент инерции редуктора;
![]() ;
;
=0.77 (c).
3) Для третьего канала:
Выберем передаточное число редуктора из следующих условий:
 .
.
Подставляя численные значения, получаем:
![]() .
.
Выберем i =50.
![]() .
.
![]()
![]() ;
;
![]()
Суммарный момент инерции, приведенный к валу двигателя: ,
где - момент инерции двигателя;
- момент инерции редуктора;
![]() ;
;
=0.012 (c).