

Санкт-Петербургский Государственный Университет Информационных Технологий Механики и Оптики
Кафедра систем управления и информатики
Расчетно-графическая работа
по курсу " Робототехнические системы и комплексы".
Выполнил: студент гр. 5146
Багаутдинов Е.
Преподаватель:
Котельников Ю.П.
Санкт-Петербург
2010 г.
Техническое задание.
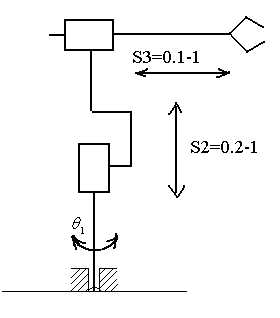
Рисунок 1-Техическое задание.
Решение прямой и обратной задач кинематики.
Основным вопросом при рассмотрении манипулирования с использованием роботов является способность поместить объект управления (схват манипулятора) в определенную точку с требуемой ориентацией в заданное время.
Прямая задача кинематики.
Определение
![]() - вектора, определяющего положение
схвата манипулятора, при известном
векторе параметров
- вектора, определяющего положение
схвата манипулятора, при известном
векторе параметров
![]() :
:
![]() ,
,
![]() .
.
Обратная задача кинематики.
Определение
параметров
![]() звеньев манипулятора, если известен
вектор
звеньев манипулятора, если известен
вектор
![]() - радиус вектор схвата.
- радиус вектор схвата.
Для решения прямой и обратной задач необходимо определенным образом осуществлять выбор систем координат.
Выбор систем координат.
Манипулятор представляет собой систему материальных тел (звеньев), образующих разомкнутую кинематическую цепь. Звенья этой цепи образуют поступательная кинематическая пары 5-го класса и вращательная кинематическая пара пятого класса.
Для
того чтобы описать положение
![]() -го
звена
-го
звена
![]() в системе
в системе
![]() ,
свяжем с этим звеном декартову систему
координат
,
свяжем с этим звеном декартову систему
координат
![]() .
В качестве основной системы обычно
выбирается система
.
В качестве основной системы обычно
выбирается система
![]() ,
связанная со стойкой манипулятора. Ось
,
связанная со стойкой манипулятора. Ось
![]() направим вдоль первого звена манипулятора.
В качестве оси
направим вдоль первого звена манипулятора.
В качестве оси
![]() выбирается перпендикуляр к оси
,
а направление задается так, чтобы система
координат была правой. При таком выборе
систем координат каждая
- тая система координат связана с
-
тым звеном манипулятора.
выбирается перпендикуляр к оси
,
а направление задается так, чтобы система
координат была правой. При таком выборе
систем координат каждая
- тая система координат связана с
-
тым звеном манипулятора.
Выбор систем координат
Система
координат
![]() связывается со схватом манипулятора.
Обозначим угол поворота
- го звена относительно
связывается со схватом манипулятора.
Обозначим угол поворота
- го звена относительно
![]() - го через
- го через
![]() ,
а величину относительного поступательного
перемещения через
,
а величину относительного поступательного
перемещения через
![]() .
Величины
и
соответствуют паре с номером
.
Совокупность величин
и
однозначно определяют положение
механизма в пространстве. Эти величины
названы обобщенными координатами
механизма и обозначаются вектором
.
Величины
и
соответствуют паре с номером
.
Совокупность величин
и
однозначно определяют положение
механизма в пространстве. Эти величины
названы обобщенными координатами
механизма и обозначаются вектором
![]() ,
причем
,
причем
![]() ,
,
где
![]() - для вращательной пары,
- для вращательной пары,![]() - для поступательной пары.
- для поступательной пары.
Система координат.
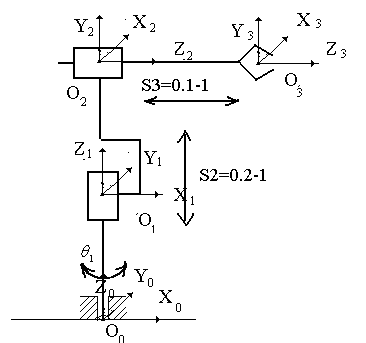
Рисунок 2-Система координат.
Из
параметров
и
один является переменным и совпадает
с обобщенной координатой, соответствующей
- ой кинематической паре, другой параметр
постоянен: для пары вращения
![]() ,
для пары поступательного движения
,
для пары поступательного движения
![]() .
Общий случай матрицы преобразования:
.
Общий случай матрицы преобразования:
 .
.
Опишем связь между введенными выше системами координат. Нулевая система может быть совмещена с первой системой посредством следующих последовательно выполняемых операций:
(а) поворот на угол 1 вокруг оси Z0 до тех пор, пока оси x0 и x1 не станут параллельными;
(б) перенос на величину S1 вдоль оси z0 до тех пор, пока оси X0 и х1 не совместятся;
(в) перенос на величину а1 вдоль оси x1, до совпадения начала координат O0 с началом координат O1;
(г) поворот на угол 1 относительно оси x0 до совмещения всех координатных осей.
2.1 Решение прямой задачи кинематики. Формулы перехода
Матрица преобразования координат
;
Между системами
 :
:
 .
.
Из
рисунка видно, что
 .
.
Матрица преобразования координат:
 ,
,
 ,
,
 .
.
Между системами
 :
:
 .
.
Из
рисунка видно, что
 .
.
Матрица преобразования координат:
 , l21
= 12
l22
=
, l21
= 12
l22
=
 .
.
Между системами
 :
:
 .
.
Из
рисунка видно, что
 .
.
Матрица преобразования координат:
 ,
l32
= 23
l33
=
,
l32
= 23
l33
=
 .
.
Вектор, определяющий положение схвата манипулятора:
![]() .
.
Проверка:
1) Повернем робот так, что
![]() =0,
=0,
![]() ,
,
![]() тогда
тогда
Рисунок 3 – Положение манипулятора
2) Повернем
робот так, что
=90,
,
тогда
 , то есть схват манипулятора будет
смотреть в сторону доски-и соответственно
будет иметь 0 координату по х, по y=1,z=1.
, то есть схват манипулятора будет
смотреть в сторону доски-и соответственно
будет иметь 0 координату по х, по y=1,z=1.