

2.2. Характеристика и классификация поисковых методов оптимизации
Наибольшее распространение в решении задач оптимизации ЭМУС получили численные методы нелинейного математического программирования – так называемые методы поиска или поисковые методы. Последнее название точно отражает существо методов, состоящее в организации движения точки, соответствующей варианту проекта (изображающей точки), в пространстве параметров x1, x2, . . . , xn.
Такое движение точки соответствует, в частности, при проектировании ЭМУС последовательному рассмотрению вариантов, например, синхронного генератора с возбуждением от постоянных магнитов, отличающихся отношением наружного диаметра к активной длине статора. Каждая точка – один вариант генератора. В результате такого, специальным образом организованного, движения от некоторой начальной точки достигается приближение к точке, дающей экстремум функции цели, например, максимум КПД генератора. Применение этих методов связано с многократным вычислением значений функций цели и ограничений, что для ЭМУС представляется достаточно объёмной вычислительной задачей. Поэтому методы поиска получили повсеместное распространение, прежде всего, благодаря возможности применения вычислительной техники.
Существует большое число методов поисковой оптимизации, различных по способу организации движения изобретающей точки в пространстве параметров и условиям окончания поиска. Вместе с тем существуют и общие особенности поисковых методов, позволяющие рассматривать их в качестве отдельной группы методов оптимизации. Прежде всего, методы поиска – это численные методы, дающие только некоторое приближение к оптимуму функции цели, т. е. решающие задачу с определенной степенью точности, задаваемой конечной величиной шага по параметрам оптимизации. Далее, все методы поиска характеризует одна и та же последовательность действий.
Логическая схема алгоритмов поиска следующая:
Вводятся исходные данные для расчёта объекта проектирования, в частности, в случае ЭМУС, например, исходные данные для электромагнитного поверочного расчёта синхронного генератора с возбуждением от постоянных магнитов; из этих данных один или несколько параметров изменяются при переходе от одного варианта объекта проектирования к другому, например, при переходе от варианта генератора с одним значением отношения наружного диаметра к активной длине статора, к варианту генератора с другим значением этого отношения.
Формируется очередная изображающая точка в пространстве параметров оптимизации, в частности, в случае ЭМУС, проводится, например, электромагнитный поверочный расчёт очередного варианта синхронного генератора с возбуждением от постоянных магнитов с конкретным значением отношения наружного диаметра к активной длине статора.
Осуществляется в результате обращения к цифровой модели объекта проектирования и соответствующим алгоритмам анализа проверка выполнения ограничений. Например, в результате обращения к цифровой модели электромагнитных процессов в синхронном генераторе с возбуждением от постоянных магнитов, реализующей на ЭВМ алгоритм электромагнитного поверочного расчёта такого генератора, осуществляется проверка размещения генератора в заданных ТЗ габаритах, проверка максимально допустимого значения тока и др.
Если хотя бы одно из ограничений оказалось невыполненным, то формируется следующая точка в пространстве параметров, что соответствует выбору нового варианта проекта. В рассматриваемом примере это соответствует выбору нового варианта синхронного генератора с возбуждением от постоянных магнитов с другим значением отношения наружного диаметра к активной длине статора. Затем действия по проверке ограничений повторяются. Если все ограничения выполняются, это означает, что найден один из допустимых вариантов проекта, в частности генератора.
Для этого варианта с помощью цифровой модели объекта проектирования и соответствующих алгоритмов анализа определяется в числе других рабочих показателей значение функции цели. Например, с помощью цифровой модели электромагнитных процессов в синхронном генераторе с возбуждением от постоянных магнитов, реализующей на ЭВМ алгоритм электромагнитного поверочного расчёта такого генератора, определяется в числе других рабочих показателей генератора значение КПД варианта генератора с конкретным значением отношения наружного диаметра к активной длине статора.
Проверка условий окончания поиска. Она завершает очередной шаг поиска, на котором было рассмотрено и сопоставлено с другими ещё одно проектное решение, Например, был рассмотрен вариант синхронного генератора с возбуждением от постоянных магнитов с конкретным значением отношения наружного диаметра к активной длине статора и сопоставлен с вариантами такого генератора с другими значениями указанного отношения.
Вывод результатов, например, результатов электромагнитного поверочного расчёта варианта синхронного генератора с возбуждением от постоянных магнитов, имеющего максимальный КПД.
Логическая схема поиска, соответствующая приведённому описанию, показана на рис.2.1.
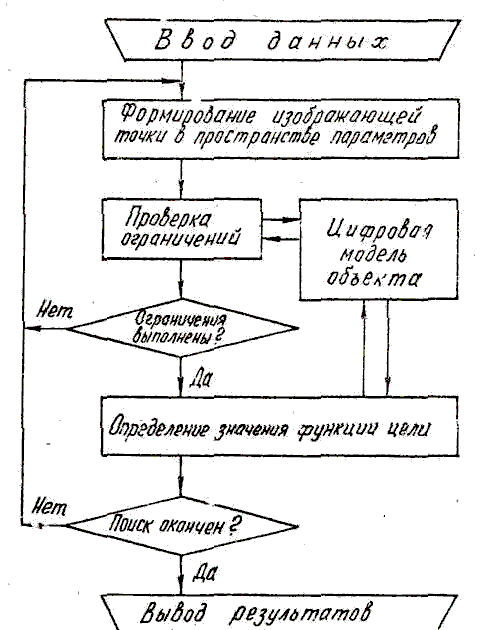
Рис.2.1. Логическая схема алгоритмов поиска
Из описания и схемы видно, что процесс поиска характеризуется циклическими действиями по определению как допустимых, так и оптимальных проектных решений. При этом поиск проводится для некоторой конечной совокупности точек в пространстве параметров, которая задаётся заранее или определяется в процессе поиска в зависимости от результатов, полученных на предыдущих шагах.
Одна из возможных классификаций методов поисковой оптимизации представлена на рис.2.2. На верхнем уровне вся совокупность методов подразделяется на две основные классификационные группы:
методы пассивного поиска;
методы направленного поиска.
Для пассивного поиска характерно:
равномерный просмотр совокупности вариантов проекта, принадлежащих заранее заданной области в пространстве параметров оптимизации;
при этом никак не учитывается информация о результатах, полученных на предыдущих шагах поиска (отсюда и название этой группы методов);
после того, как определены значения функции цели во всех заданных точках, нужно найти вариант проекта, обладающий экстремальным значением Q.
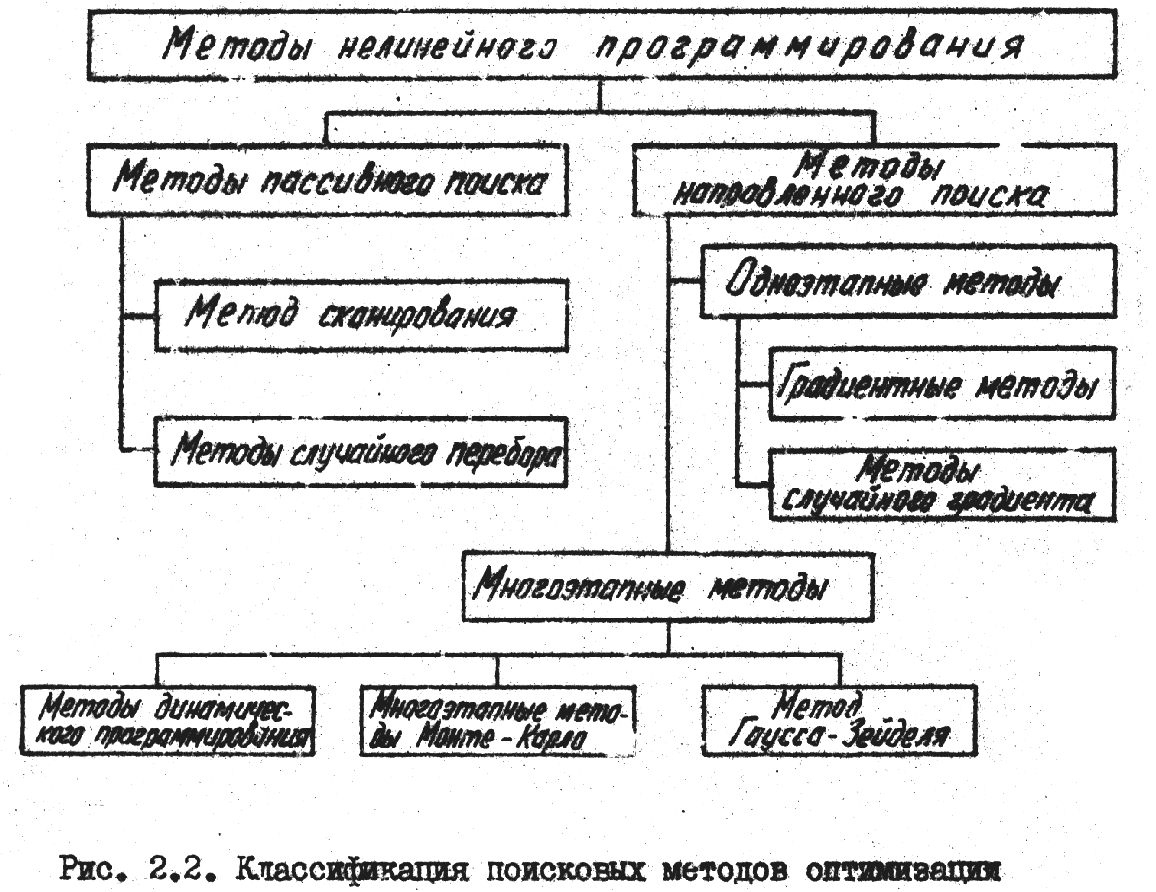
Существо методов направленного поиска состоит в следующем:
выбор движения из каждой точки в пространстве параметров таким образом, чтобы при этом улучшались результаты, полученные на предыдущих шагах;
поиск в данном случае продолжается до тех пор, пока ещё удаётся улучшать значения функции цели;
для того чтобы в данном случае сделать поиск конечным (г. е. ограничить число шагов поиска), необходимо задавать требования по точности определения положения экстремума Q в пространстве параметров;
В отличие от предыдущей группы методов, в направленном поиске для формирования следующего варианта проекта используется информация, полученная на предыдущих шагах.