

Создание программы пид-регулятора.
Для того чтоб создать блок ПИД-регулятора необходимо загрузить библиотеку Util.lib (библиотеки CoDeSys), нажав кнопку «Ресурсы», расположенную справа внизу окна «Система». Выбрать «Менеджер библиотек» и нажать дважды левой клавишей манипулятора «мышь» (рис. 10).
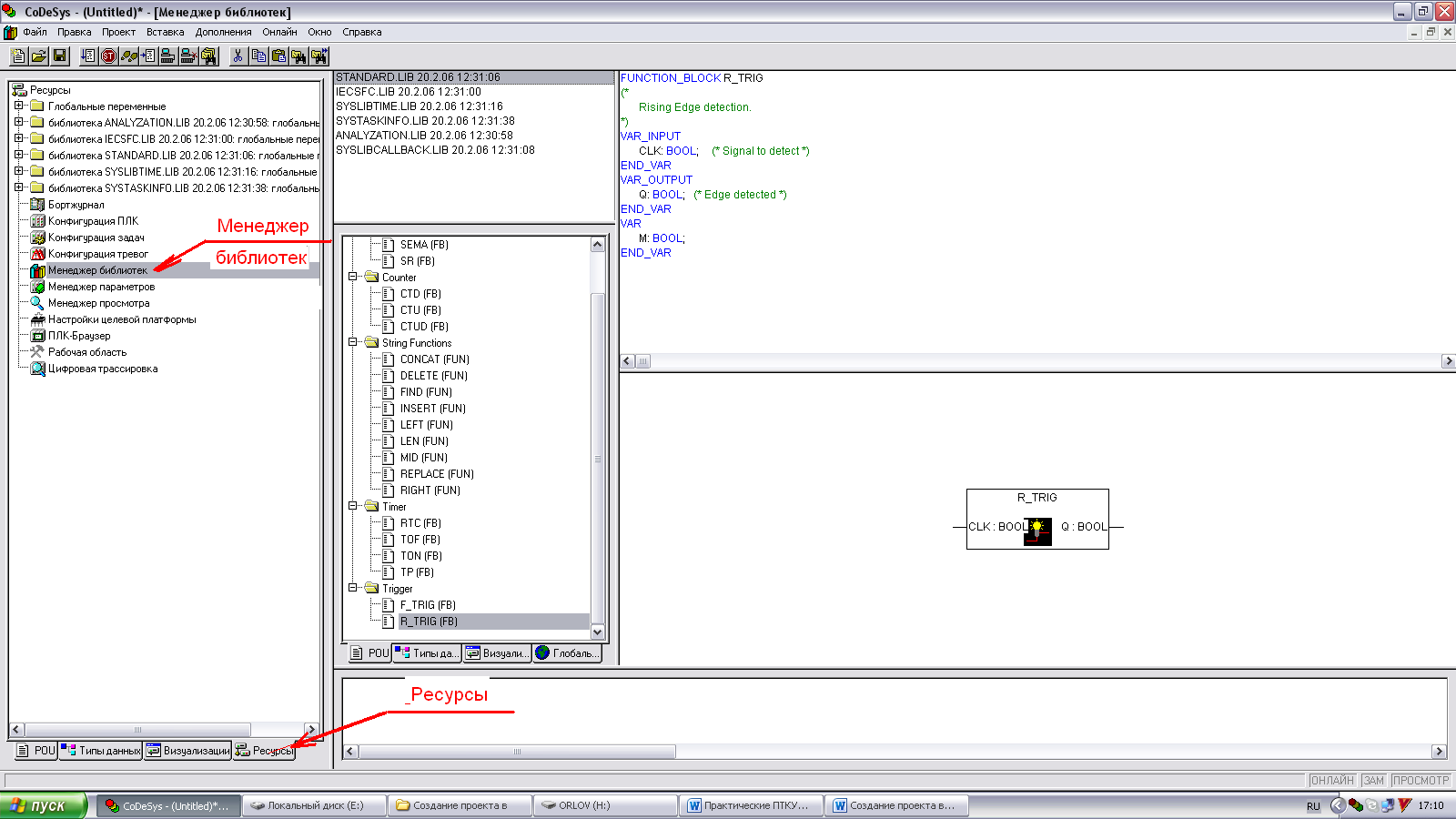
Рис. 10
Далее в панели «Меню» нажать «Вставка» и в появившемся окне выделить «добавить библиотеку…Ins» (рис. 11).
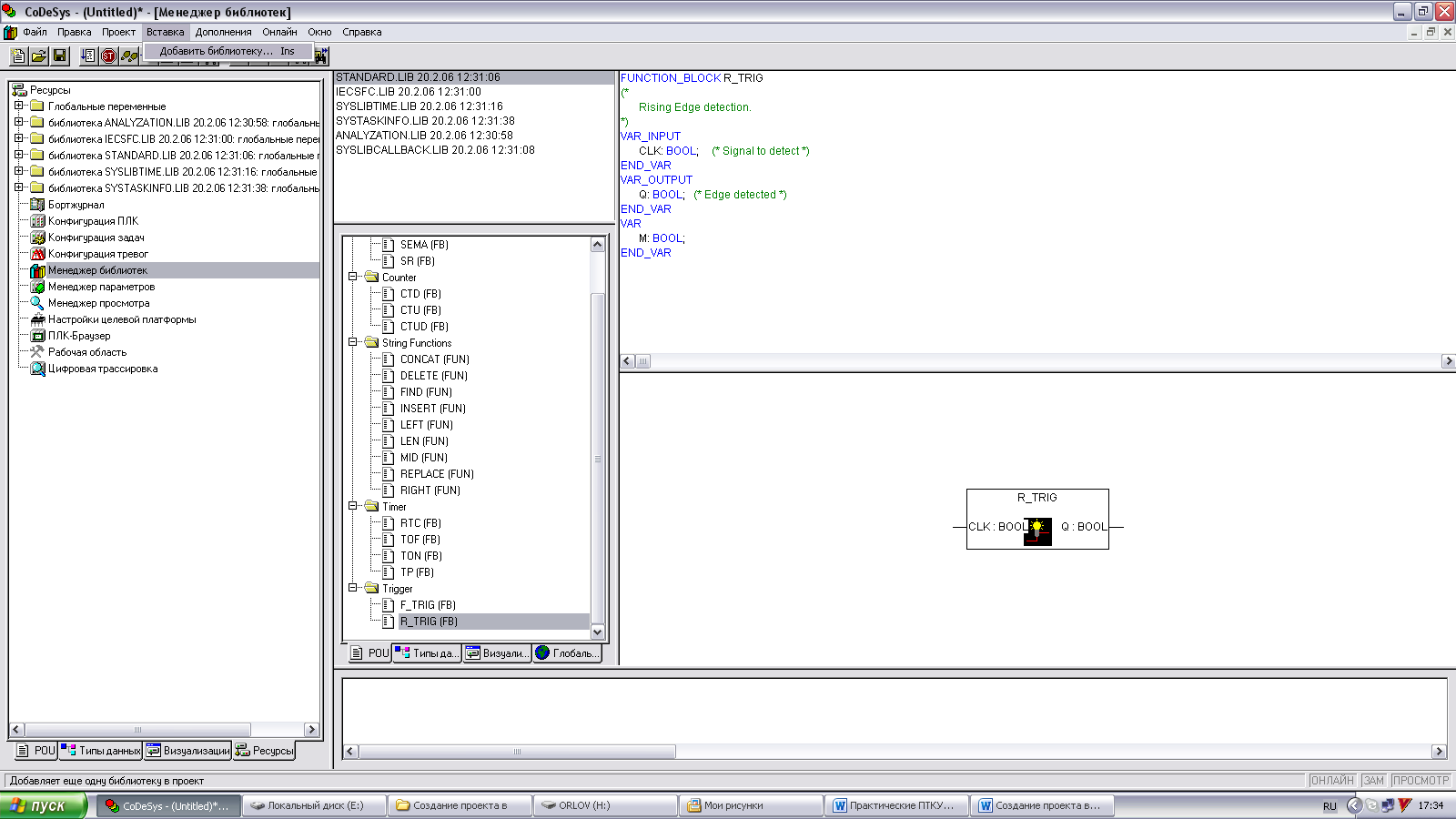
Рис. 11
Появится окно «Открыть» с папкой «Library» (библиотеки CoDeSys), в которой необходимо выбрать необходимую библиотеку показанную на рис.12 и нажать кнопку «Открыть».
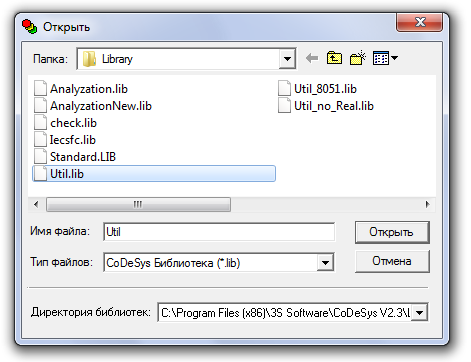
Рис. 12
Выбранная библиотека добавляется в список библиотек, с которыми можно работать.
После загрузки библиотеки выбираем и выделяем необходимый функциональный блок ПИД-регулятор - PID (FB) и копируем его название с помощью комбинации клавиш Ctrl+C (рис.13).
Открываем рабочую область, в которой пишется программа с помощью нажатия на вкладку POU и дважды щёлкаем левой клавишей манипулятора мышь на PLC_PRG(PRG) (рис.14). В появившемся окне вставляем «Элемент» путём нажатия на кнопку «Элемент», расположенной на панели инструментов или на клавиатуре клавиш <Ctrl> + <B>, при этом появляется элемент с именем «AND» (рис. 15).
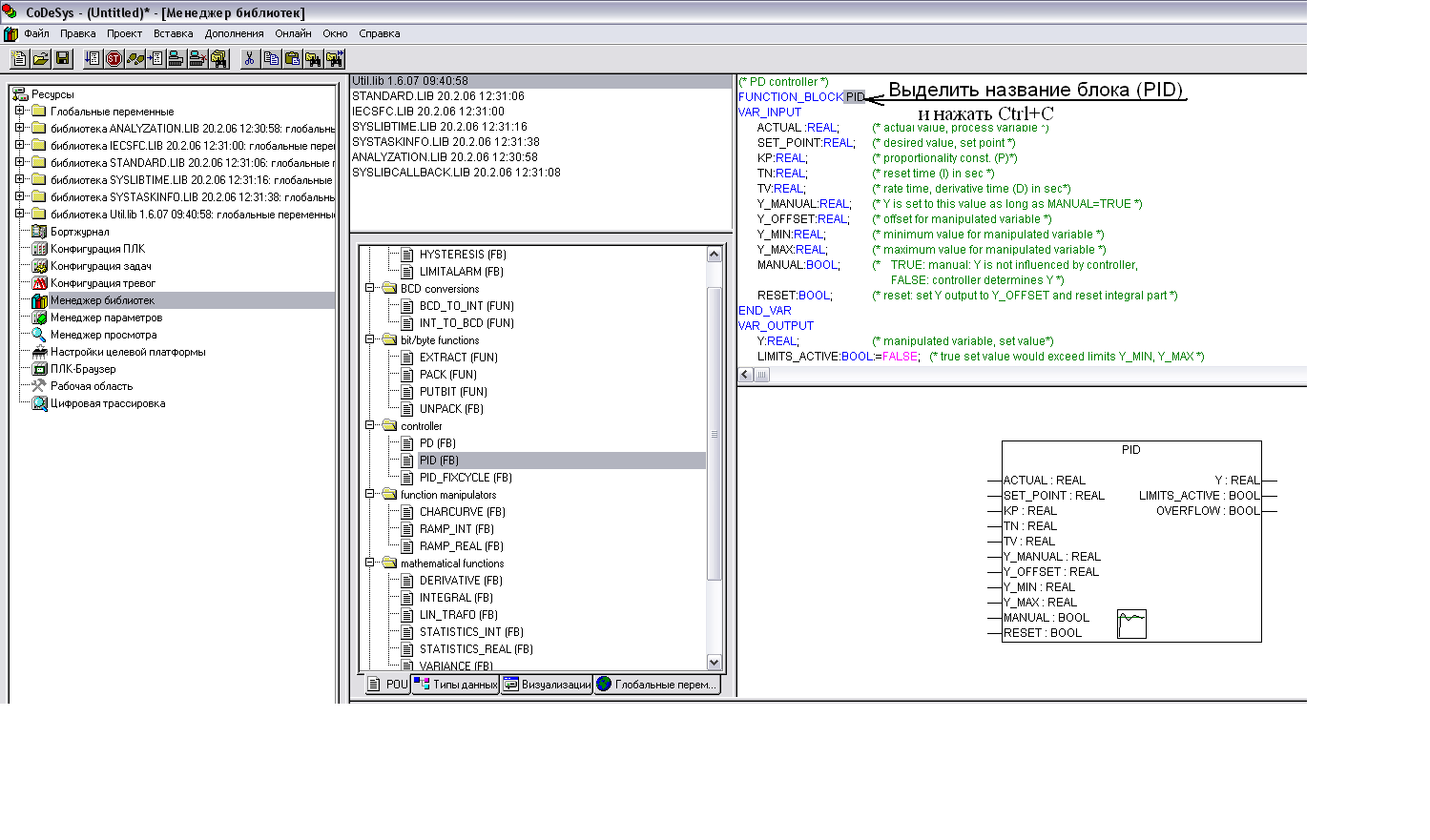
Рис. 13
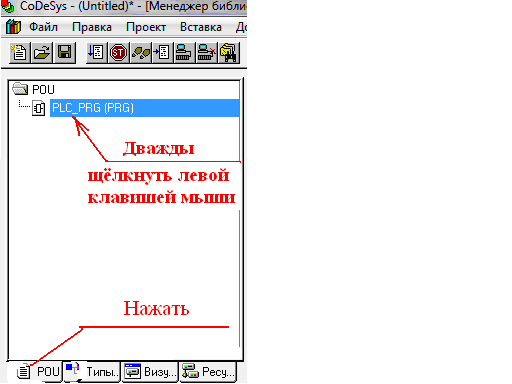
Рис.14
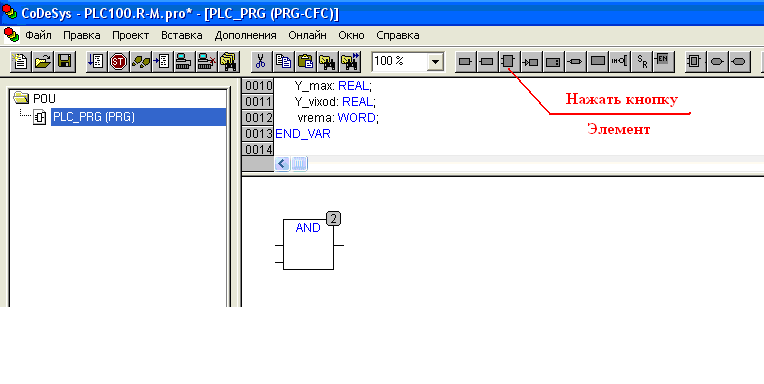
Рис. 15
Выделив текстовое поле внутри этого элемента, изменяем имя «AND» на имя «PID» нажатием комбинации клавиш Ctrl+V. Появляется блок пропорционально – интегрально –дифференциального регулятора «PID» (рис. 16).
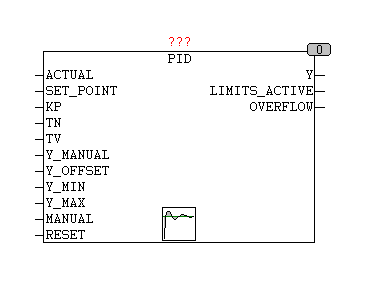
Рис. 16
Теперь необходимо дать название функциональному блоку, например: PID. Название пишется только на английском языке на месте 3-х вопросительных знаков над блоком. После того, как прописали имя, нажмите клавишу «Enter» и в появившемся окне нажмите ОК (рис. 17).
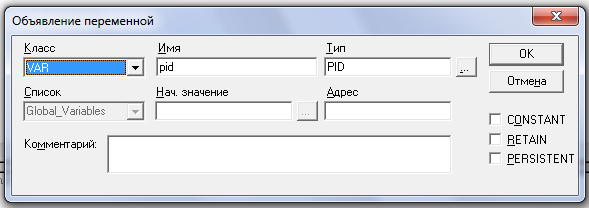
Рис. 17
Добавляем входы и выходы ФБ PID-регулятора, нажимая кнопки «Вход» или «Выход» и устанавливая их на соответствующие места регулятора, в результате появится блок, представленный на рисунке 18.
В текстовом поле входа и выхода появятся три знака вопроса, которые нужно заменить на имя переменной, написанное на английском языке.
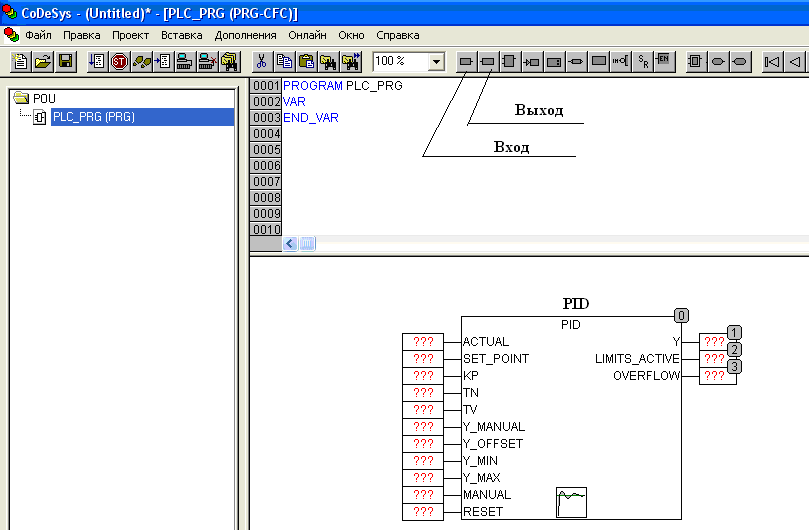
Рис. 18
Вводим обозначения входных сигналов:
Вход Actual – обозначаем – pv, для чего выделяем три вопроса, вводим принятое обозначение и нажимаем клавишу Enter. Появляется окно «Объявление переменной», где надо нажать на клавишу, указанную на рисунке 19 для изменения типа переменной.
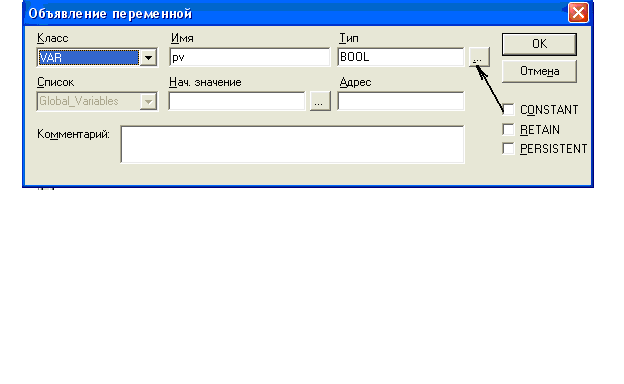
Рис.19
Появится окно «Ассистент ввода», где необходимо выбрать тип переменной, который должен соответствовать типу, указанному в таблице №1.
Назначение и тип входных и выходных параметров регулятора представлено в таблице №1
Таблица №1
Наименование |
Тип |
Описание |
ACTUAL |
REAL |
Текущее значение контролируемой переменной.
|
SET_POINT |
REAL |
Задание. |
KP |
REAL |
Коэффициент передачи. |
TN |
REAL |
Постоянная интегрирования, в секундах (т.е. "0.5" для 500 мс). |
TV |
REAL |
Постоянная дифференцирования, в секундах (т.е. "0.5" для 500 мс). |
Y_MANUAL |
REAL |
Определяет значение выхода Y, если MANUAL = TRUE. |
Y_OFFSET |
REAL |
Стационарное значение Y. |
Y_MIN, Y_MAX |
REAL |
Значение выхода Y ограничено Y_MIN и Y_MAX. При достижении Y границ ограничения, выход LIMITS_ACTVE, (BOOL) принимает значение TRUE. Ограничение работает только при Y_MIN < Y_MAX. |
MANUAL |
BOOL |
Значение TRUE, включает режим ручного регулирования по входу Y_MANUAL. |
RESET |
BOOL |
TRUE сбрасывает регулятор; в это время Y = Y_OFFSET |
Так, вход Actual должен иметь тип «REAL».Поэтому выбираем данный тип в окне «Ассистент ввода» и нажимаем кнопку «ОК» (Рис. 20).
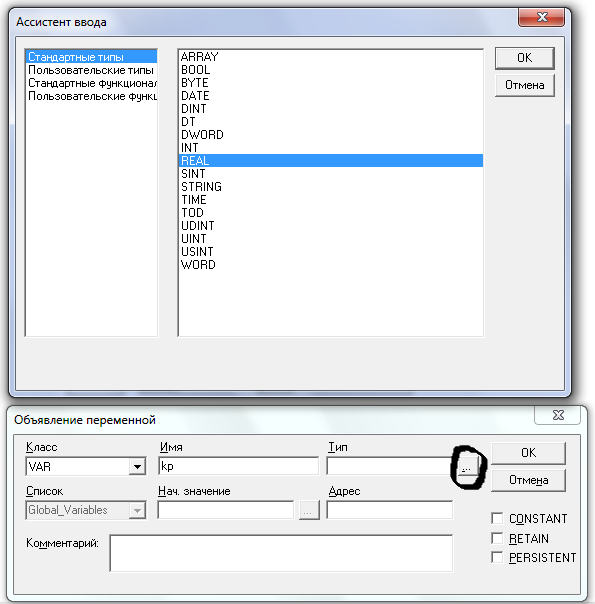
Рис. 20
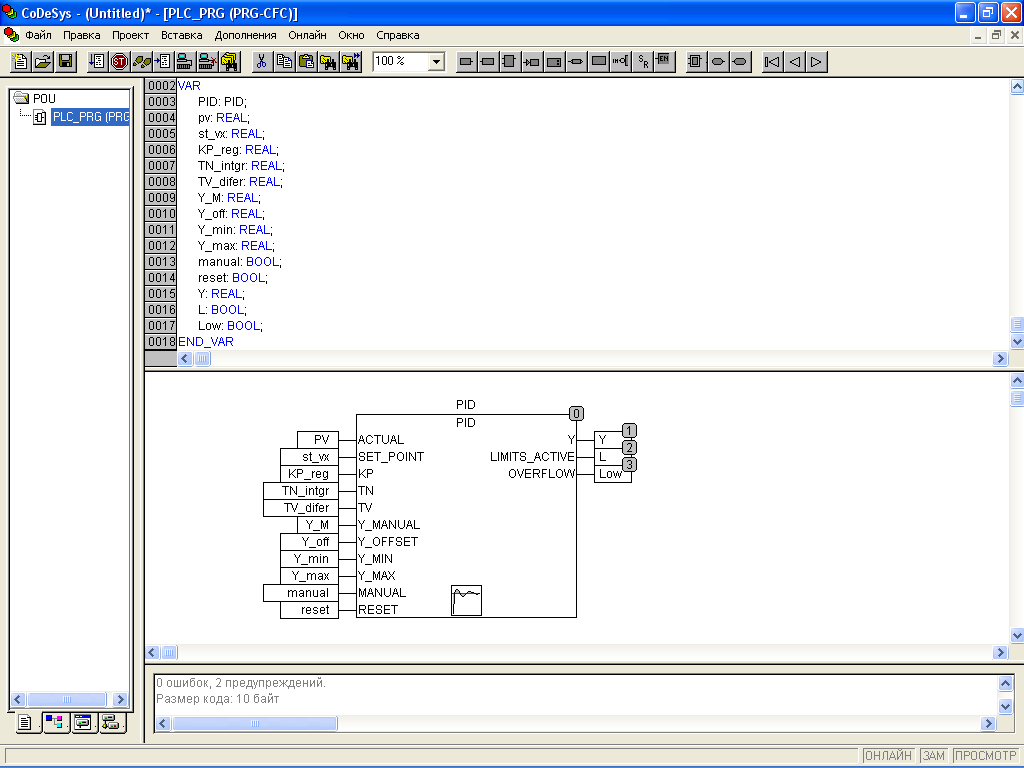
Аналогично вводим остальные обозначения входных и выходных сигналов регулятора «PID». В результате получим регулятор, представленный на рисунке 21.
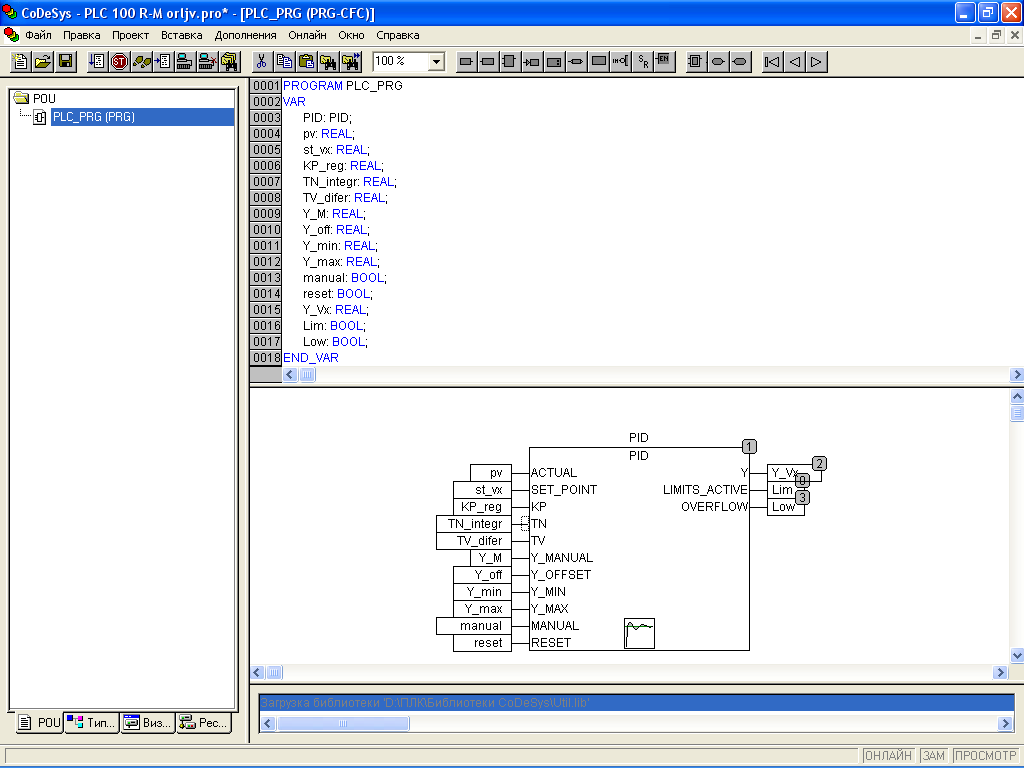
Рис. 21
Для проверки правильности выполненной работы необходимо произвести компиляцию созданного проекта (Компиляция - процесс получения готовых для загрузки в контроллеры алгоритмов). Для компиляции проекта необходимо выбрать в панели меню «Проект» и в открывшемся списке нажать левой клавишей манипулятора «мышь» Компилировать (рис. 22).
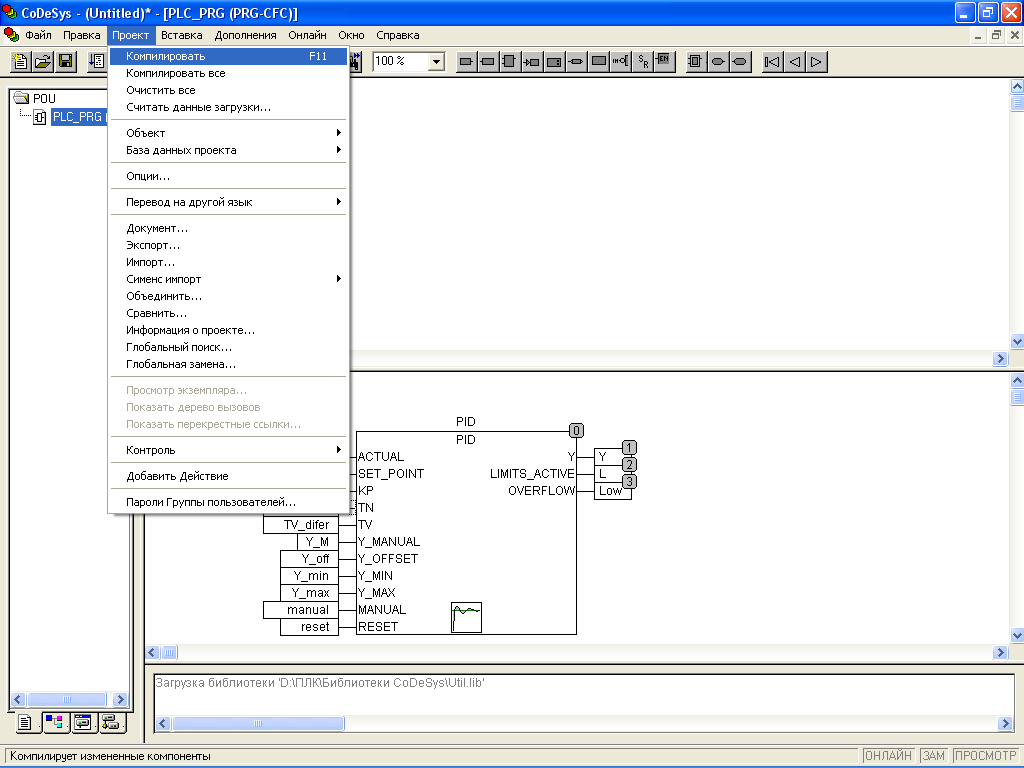
Рис. 22
В случае, правильно выполненной работы можно приступить к проверке работы регулятора в «Режиме эмуляции». Для этого надо выбрать в панели меню «Онлайн» и в появившемся списке выбрать «Режим эмуляции» (рис. 23)
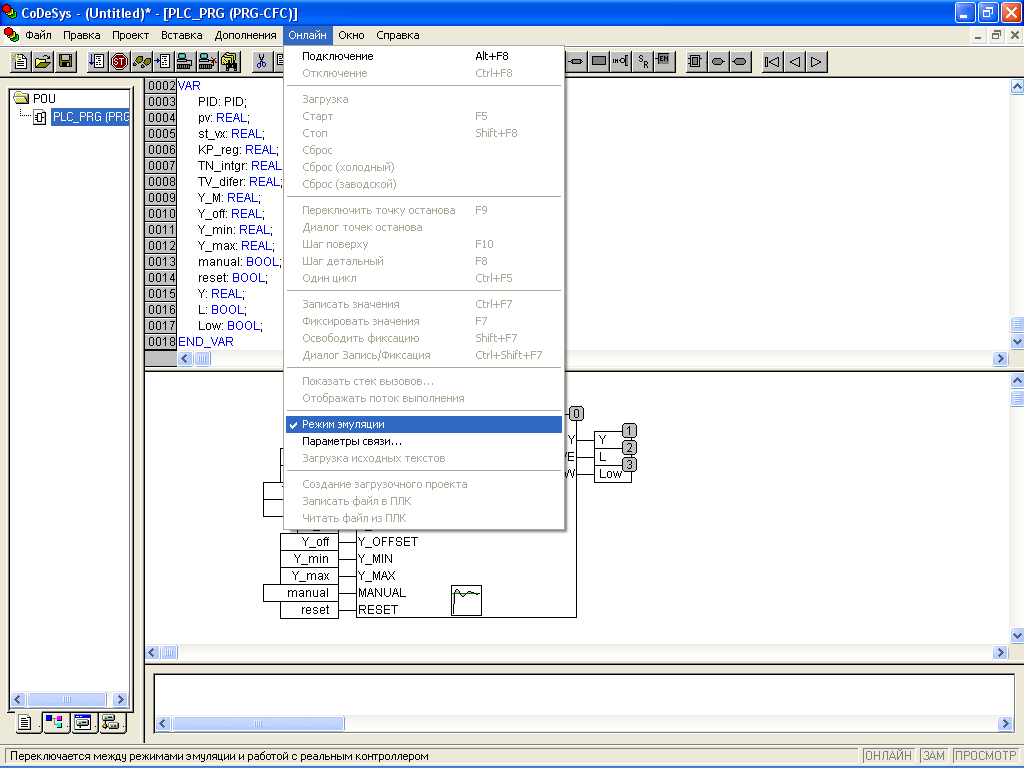
Рис. 23
Для запуска,
разработанного проекта ПИД регулятора
надо выбрать
в панели Меню
клавишу
 «Подключение»
и нажать на клавиатуре F5.
Задавая
значения параметров: ACTUAL;
SET_POINT; KP; TN и TV можно проанализировать
значения выходного сигнала Y
«Подключение»
и нажать на клавиатуре F5.
Задавая
значения параметров: ACTUAL;
SET_POINT; KP; TN и TV можно проанализировать
значения выходного сигнала Y