

8. Основные способы вычисления углового ускорения при плоском движении
Способы определения углового ускорения:
1. Если известен угол поворота или угловая скорость в зависимости от времени, то угловое ускорение определяем путем дифференцирования их по времени, т.е.
![]()
2 .
Обычно требуется определить угловое
ускорение в какой-либо момент времени
по другим величинам, известным в этот
же момент времени. В этом случае угловое
ускорение тоже можно получить путем
дифференцирования угловой скорости по
времени. Угловую скорость можно найти:
.
Обычно требуется определить угловое
ускорение в какой-либо момент времени
по другим величинам, известным в этот
же момент времени. В этом случае угловое
ускорение тоже можно получить путем
дифференцирования угловой скорости по
времени. Угловую скорость можно найти:
![]() ,
,
где А – точка плоской фигуры; Р – мгновенный центр скоростей.
Дифференцируя по времени, получаем
![]()
В тех случаях, когда АР постоянно,
![]() ,
,
так как
Рис.
37![]()
![]() ,
,
где
![]() - касательное ускорение точки А.
- касательное ускорение точки А.
Так, например, при качении колеса без скольжения по неподвижной прямой линии, если за точку А взять центр колеса О, то, учитывая, что он движется прямолинейно, получим
![]() .
.
При качении без скольжения одного колеса по неподвижному другому колесу (рис. 37)
![]() ,
,
где R – радиус неподвижного колеса; r – радиус подвижного колеса.
Дифференцируя по времени, имеем
![]() ,
,
так как
![]() ;
.
;
.
9. Теоерма о конечном перемещении плоской фигуры
Ф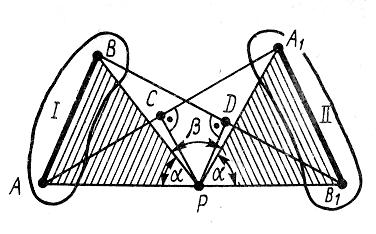 игуру
в ее плоскости из заданного положения
I
в любое другое положение II
(рис.38) можно перевести одним поворотом
в этой плоскости вокруг точки P,
называемой центром конечного вращения.
игуру
в ее плоскости из заданного положения
I
в любое другое положение II
(рис.38) можно перевести одним поворотом
в этой плоскости вокруг точки P,
называемой центром конечного вращения.
Рис.
38
10. Мгновенный центр вращения. Центроиды
Для двух бесконечно близких положений плоской фигуры вместо центра конечного вращения получим так называемый мгновенный центр вращения. Любое плоское перемещение фигуры можно приближенно заменить последовательностью вращательных перемещений вокруг своих центров конечного вращения. В пределе плоское перемещение фигуры можно заменить бесконечной последовательностью элементарных мгновенных поворотов вокруг мгновенных центров вращений, расположенных в определенной последовательности.
Отсюда следует, что любое плоское движение фигуры можно заменить последовательностью мгновенных вращений, совершаемых за тот же промежуток времени, что и рассматриваемое плоское движение.
При плоском движении фигуры мгновенный центр вращения перемещается как в неподвижной, так и в подвижной плоскости, скрепленной с движущейся плоской фигурой. Геометрическое место мгновенных центров вращения на неподвижной плоскости называют неподвижной центроидой, а геометрическое место этих же мгновенных центров вращения на подвижной плоскости, скрепленной с движущейся фигурой, – подвижной центроидой.
При плоском движении фигуры подвижная центроида катится без скольжения по неподвижной центроиде. Эта теорема позволяет плоское движение твердого тела рассматривать как качение без скольжения одной плоской кривой по другой.
Вращение твердого тела вокруг неподвижной точки. Общий случай движения тела
Ч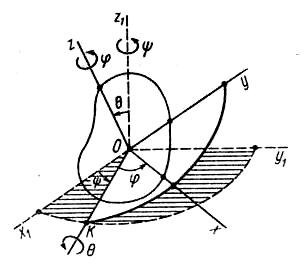 ерез
неподвижную точку О
твердого тела проведем неподвижную
систему координат O1x1y1
относительно которой будем рассматривать
движение тела (рис. 39). Другую систему
координат Oxyz
скрепим с телом, вращающимся вокруг
неподвижной точки О.
Для определения положения движущегося
тела относительно системы координат
O1x1y1
следует
задать относительно этой системы
координат положение другой, подвижной,
системы координат Oxyz, скрепленной с
движущимся телом. Для этой цели Эйлер
предложил три независимых параметра –
углы Эйлера.
ерез
неподвижную точку О
твердого тела проведем неподвижную
систему координат O1x1y1
относительно которой будем рассматривать
движение тела (рис. 39). Другую систему
координат Oxyz
скрепим с телом, вращающимся вокруг
неподвижной точки О.
Для определения положения движущегося
тела относительно системы координат
O1x1y1
следует
задать относительно этой системы
координат положение другой, подвижной,
системы координат Oxyz, скрепленной с
движущимся телом. Для этой цели Эйлер
предложил три независимых параметра –
углы Эйлера.
Первый из этих углов – угол прецессии – определяет положение линии узлов ОК, которая является линией пересечения координатных плоскостей O1x1y1 и Оху относительно неподвижной координатной оси Ox1. Для изменения этого угла тело должно вращаться вокруг координатной оси Oz1 которую называют осью прецессии.
Вторым углом Эйлера является угол между координатными плоскостями Ox1y1 и Оху. Его измеряют углом между перпендикулярами к этим координатным плоскостям, которыми являются оси Oz1 и Oz.
У
Рис.
39
Для полного определения положения рассматриваемого тела относительно системы координат O1x1y1z1 нужно задать угол между подвижной осью координат Ох и положительным направлением линии узлов ОК – угол собственного вращения . Угол от линии узлов ОК до оси Ох считается положительным, если вокруг оси Oz поворот оси Ох от линии ОК виден происходящим против часовой стрелки.
При изменении угла тело вращается вокруг так называемой оси собственного вращения Oz, перпендикулярной плоскости, в которой лежат прямые ОК и Ох, образующие этот угол.
Углы Эйлера широко применяются в теории гироскопов.
В технике особенно важное значение имеет так называемая регулярная прецессия, когда угловые скорости вращения вокруг оси собственного вращения и вокруг неподвижной оси прецессии постоянны и угол между этими осями (угол нутации) остается тоже постоянным.
Итак, для определения положения тела с одной неподвижной точкой в любой момент времени надо задать углы Эйлера как однозначные функции времени, т. е.
![]() ;
; ![]() ;
; ![]() .
.
Эти уравнения являются уравнениями вращения твердого тела вокруг неподвижной точки.