

4. Линейные преобразования декартовых прямоугольных координат.
В задачах аналитической геометрии часто приходится, наряду с данной прямоугольной системой координат, вводить и другие прямоугольные системы координат. Естественно возникает вопрос: как найти координаты какой либо точки в одной системе координат, зная её координаты в другой системе координат.
Рассмотрим два вида преобразований прямоугольных координат:
Параллельный сдвиг осей. Когда изменяется положение начала координат, а направления осей остаются прежними;
Поворот осей координат. Когда обе оси поворачиваются в одну сторону на один и тот же угол, а начало координат не изменяется.
Рассмотрим сначала преобразования координат первого типа.
1. Параллельный сдвиг.
Пусть в прямоугольной системе координат
![]() ,
точка
,
точка ![]() имеет координаты
имеет координаты ![]() . Новые оси координат
. Новые оси координат ![]() и
и ![]() выберем сонаправленными со старыми
осями
выберем сонаправленными со старыми
осями ![]() и
и ![]() .
Пусть
.
Пусть ![]() координаты точки
в системе
координаты точки
в системе![]()
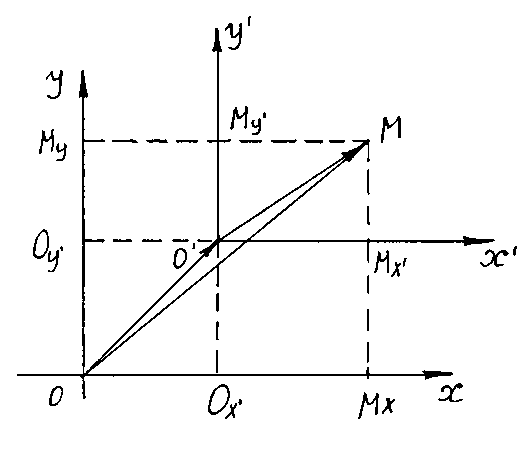
установим связь между координатами и .
Так как, ![]() – величина направленного отрезка
– величина направленного отрезка ![]() ,
,
![]() – величина направленного отрезка
– величина направленного отрезка ![]() ,
,
![]() - величина направленного отрезка
- величина направленного отрезка ![]() ,
,
![]() - величина направленного отрезка
- величина направленного отрезка ![]() ,
то
,
то
![]()
![]()
Из последних равенств находим
![]()
или
![]()
Формулы (27) и (28) определяют связь между координатами и , т.е. связь между старыми и новыми координатами произвольной точки плоскости .
2. Поворот осей координат
Пусть система координат ![]() получена путём поворота системы координат
на угол
получена путём поворота системы координат
на угол ![]() .
.
Пусть ![]() координаты точки
в системе координат
,
координаты точки
в системе координат
,
![]() координаты
координаты![]() этой же точки
в новой системе координат
.
этой же точки
в новой системе координат
.
Установим связь между координатами и .
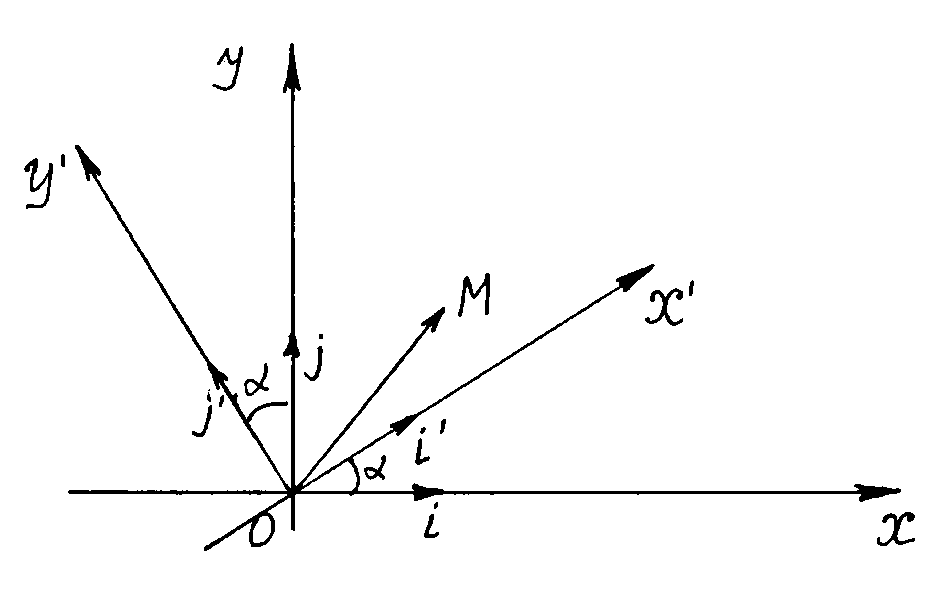
Т.к. - координаты точки , то
![]()
где ![]() - единичные векторы, имеющие направление
осей
и
соответственно.
- единичные векторы, имеющие направление
осей
и
соответственно.
Пусть ![]() и
и
![]() - единичные векторы, полученные поворотом
векторов
- единичные векторы, полученные поворотом
векторов ![]() и
и ![]() на угол
.
Очевидно, векторы
на угол
.
Очевидно, векторы![]() имеют направления, совпадающие с
направлениями осей
имеют направления, совпадающие с
направлениями осей ![]() и
и ![]() соответственно. Т.к.
- координаты точки
в системе координат
соответственно. Т.к.
- координаты точки
в системе координат ![]() ,
то
,
то
![]()
Из равенства (30) следует, что
![]()
![]()
Из равенства (29) следует, что
![]()
![]()
![]()
![]()
Из равенств (31), (32), (33), (34) следует, что
![]()
Равенства (35) позволяют находить координаты точки в системе координат , зная её координаты в системе координат .
Рассматривая равенства (35), как систему линейных алгебраических уравнений и разрешая эту систему относительно , мы можем выразить и через и .
Действительно, определитель основной матрицы равен (35)
![]()
Т.к. ![]() ,
мы можем найти
,
мы можем найти ![]() по формулам Крамера
по формулам Крамера

Матрица
![]()
называется матрицей преобразования координат.
Равенства (35), (37) можно записать в следующем виде
![]()
![]()
Матрица
,
для которой ![]() называется ортогональной матрицей.
Легко убедиться, что матрица преобразования
координат (38) является ортогональной
матрицей.
называется ортогональной матрицей.
Легко убедиться, что матрица преобразования
координат (38) является ортогональной
матрицей.
Уравнение линии второго порядка.
Общее уравнение линии второго порядка имеет следующий вид:
![]()
где ![]() – произвольные числа, при этом числа
одновременно не обращаются в ноль, т.е.
– произвольные числа, при этом числа
одновременно не обращаются в ноль, т.е.
![]() .
Коэффициенты
будем называть старшими коэффициентами.
.
Коэффициенты
будем называть старшими коэффициентами.
Лемма 3.1.
Пусть в прямоугольной системе координат
задано уравнение (37) и пусть ![]() .
Тогда с помощью параллельного сдвига
и последующего поворота осей координат
уравнение (37) приводится к виду
.
Тогда с помощью параллельного сдвига
и последующего поворота осей координат
уравнение (37) приводится к виду
![]()
где ![]() - некоторые числа;
- некоторые числа; ![]() - координаты точки в новой системе
координат.
- координаты точки в новой системе
координат.
Доказательство.
Пусть
прямоугольная система координат ![]() получена параллельным сдвигом системы
,
причём начало координат перенесено в
точку
получена параллельным сдвигом системы
,
причём начало координат перенесено в
точку ![]() .
Тогда старые координаты
.
Тогда старые координаты ![]() будут связаны с новыми координатами
будут связаны с новыми координатами
![]() формулами
формулами
![]() .
.
Подставляя эти выражения в уравнение (37), получим
![]()
![]()
![]()
![]()
![]() .
.
Из последнего уравнения получим
![]()
где ![]() ,
,
![]() .
Подберём точку
так, чтобы коэффициенты
.
Подберём точку
так, чтобы коэффициенты ![]() и
и ![]() в уравнении (39) обращались в ноль, т.е.
в уравнении (39) обращались в ноль, т.е.
![]()
Если рассматривать уравнения (40) как систему линейных алгебраических уравнений с неизвестными и , то эта система имеет единственное решение, т.к.
![]()
Следовательно, на
плоскости существует точка ![]() такая,
что в системе координат
,
полученной параллельным сдвигом системы
координат
,
уравнение (37) имеет вид
такая,
что в системе координат
,
полученной параллельным сдвигом системы
координат
,
уравнение (37) имеет вид
![]()
Заметим, что
коэффициенты ![]() при
старших членах уравнения (37), при
параллельном сдвиге системы координат
не меняются.
при
старших членах уравнения (37), при
параллельном сдвиге системы координат
не меняются.
Пусть теперь
прямоугольная система координат ![]() получена поворотом системы
получена поворотом системы ![]() на угол
.
Тогда
на угол
.
Тогда ![]() связаны с
координатами
связаны с
координатами ![]() и
и ![]() формулами
формулами
![]()
Подставляя выражения
![]() и
и ![]() в уравнение (41), получим
в уравнение (41), получим
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Вводя обозначения

получим ![]() .
.
Выберем угол поворота так, чтобы коэффициент в уравнении (44) обратился в нуль, т.е.
![]()
![]()
![]()
Если ![]() ,
то
,
то ![]() ,
т.е. в качестве
можно взять
,
т.е. в качестве
можно взять ![]() .
Если же
.
Если же ![]() ,
то из равенства (45) имеем
,
то из равенства (45) имеем ![]() .
Следовательно, существует такой угол
,
что
в уравнении (44) обратится в ноль и
уравнение (44) примет вид
.
Следовательно, существует такой угол
,
что
в уравнении (44) обратится в ноль и
уравнение (44) примет вид
![]()
Лемма 3.1 доказана.
Замечание.
Уравнения
(40) называются уравнениями центра линии
второго порядка, а точка ![]() ,
где
и
- решение системы (40), называется центром
этой линии. Заметим, что необходимым и
достаточным условием существования
единственного решения системы (40)
является условие
,
где
и
- решение системы (40), называется центром
этой линии. Заметим, что необходимым и
достаточным условием существования
единственного решения системы (40)
является условие
Докажем теперь,
что ![]() .
.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Величина ![]() называется инвариантом общего уравнения
линии второго порядка.
называется инвариантом общего уравнения
линии второго порядка.
Классификация линий второго порядка.
В зависимости от
знака величины ![]() общее уравнение линии второго порядка
разделяются на следующие три типа:
общее уравнение линии второго порядка
разделяются на следующие три типа:
 эллиптический тип
эллиптический тип гиперболический тип
гиперболический тип параболический тип.
параболический тип.
Нами доказано, что
любое уравнение линии второго порядка
![]() при
при![]() путём преобразования координат
(параллельный перенос и поворот на
определённый угол
)
можно привести к виду
путём преобразования координат
(параллельный перенос и поворот на
определённый угол
)
можно привести к виду
![]()
Очевидно, что при преобразовании координат меняется только вид уравнения линии второго порядка. Поэтому мы можем вместо общего уравнения линии второго порядка исследовать уравнение более простого вида, а именно уравнение (47).
1) Рассмотрим
линии эллиптического типа, т.е. ![]() .
Выше было доказано, что
.
Выше было доказано, что
,
т.е. величина
является инвариантом относительно
указанных преобразований координат.
Так как ![]() ,
то
,
то ![]() ,
и следовательно,
,
и следовательно, ![]() .
.
Рассмотрим два случая
а) ![]() ,
,
![]() ,
,
![]() .
Тогда из уравнения (47) имеем
.
Тогда из уравнения (47) имеем
Т.к. ![]() и
и ![]() ,
то обозначая
,
то обозначая ![]() и
и ![]() ,
получим
,
получим
![]()
Очевидно, что последнему уравнению не удовлетворяют координаты никакой точки плоскости. Оно называется уравнением мнимого эллипса.
б)
,
,
![]() .
Тогда из уравнения (47) имеем
.
Тогда из уравнения (47) имеем
Т.к. ![]() и
и ![]() ,
обозначая
,
обозначая ![]() ,
,
![]() ,
получим
,
получим
![]()
Т.е. в этом случае
уравнение (47) определяет эллипс.
(Рассмотреть случай
,
,
![]() )
)
Случаи ![]() ,
,
![]() ,
и
,
,
рассматриваются аналогично.
,
и
,
,
рассматриваются аналогично.
2) Гиперболический
тип.
.
Согласно лемме 3.1 общее уравнение линии
второго порядка приводится к виду ![]() .
Рассмотрим следующие возможные случаи:
.
Рассмотрим следующие возможные случаи:
а)
,
,
.
Перенесём ![]() в правую часть уравнения и разделим на
него, получим
в правую часть уравнения и разделим на
него, получим
Так как
и ![]() ,
то, обозначая
и
,
то, обозначая
и ![]() ,
получим
,
получим
![]()
Последнее уравнение является каноническим уравнением гиперболы.
б)
,
,
.
Тогда уравнение (47) примет вид ![]() .
Обозначая
.
Обозначая ![]() ,
,
![]() ,
получим
,
получим ![]() или
или ![]() .
.
Последнему уравнению
удовлетворяют координаты точек,
расположенных на пересекающихся прямых
![]() и
и ![]() .
Таким образом, в данном случае, уравнение
(47) определяет пару пересекающихся
прямых.
.
Таким образом, в данном случае, уравнение
(47) определяет пару пересекающихся
прямых.
в)![]() ,
,
.
В этом случае уравнение (47) можно записать
в виде
,
,
.
В этом случае уравнение (47) можно записать
в виде
![]() .
.
.
.
Так как
и ![]() ,
то обозначая
и
,
получим
,
то обозначая
и
,
получим
![]()
Что является уравнением гиперболы, сопряжённой к гиперболе
![]()
Все оставшиеся случаи получаются из рассмотренных случаев а, б, в.
3. Параболический тип. Если , то поворотом осей координат на угол , который был рассмотрен при доказательстве леммы 3.1, общее уравнение линии второго порядка может быть приведено к виду
![]()
Так как выражение
является инвариантом относительно
поворота осей координат, то ![]()
![]() .
Т.е либо
.
Т.е либо ![]() ,
либо
,
либо ![]() .
Пусть
и
.
Пусть
и ![]() .
Тогда из уравнения (49) найдем
.
Тогда из уравнения (49) найдем
![]()
Из этого уравнения имеем
![]() или
или
![]()
Перенесём начало
координат параллельно оси
в точку ![]() и перейдём к новым координатам
и
,
тогда
и перейдём к новым координатам
и
,
тогда
![]()
И уравнение (50) примет вид
![]()
где ![]() .
.
Рассмотрим два случая.
а) ![]() .
Тогда уравнение (51) можно записать в
виде
.
Тогда уравнение (51) можно записать в
виде
![]()
Перенесём начало
координат параллельно оси ![]() в точку
в точку ![]() ,
получим
,
получим ![]() ,
,
![]() .
Учитывая последние равенства в уравнении
(52), получим
.
Учитывая последние равенства в уравнении
(52), получим
![]() или
или ![]() ,
где
,
где ![]() .
.
б) ![]() ,
тогда
,
тогда
![]()
Если
и ![]() имеют разные знаки, то уравнение (53)
можно записать в следующем виде:
имеют разные знаки, то уравнение (53)
можно записать в следующем виде:
![]() где
где ![]() .
.
Уравнение (54) в
свою очередь можно записать в виде ![]() .
Это уравнение определяет пару параллельных
прямых
.
Это уравнение определяет пару параллельных
прямых ![]() и
и ![]() .
.
Если
и
имеют одинаковые знаки, то уравнение
(53) примет вид: ![]() ,
где
,
где ![]() .
Очевидно последнему уравнению не
удовлетворяют координаты никакой точки
плоскости. Оно называется уравнением
пары мнимых параллельных прямых.
.
Очевидно последнему уравнению не
удовлетворяют координаты никакой точки
плоскости. Оно называется уравнением
пары мнимых параллельных прямых.
Наконец, если ![]() ,
то уравнение (53) примет вид
,
то уравнение (53) примет вид ![]() или
или ![]() .
Последнее уравнение определяет ось
.
Последнее уравнение определяет ось ![]() и оно называется уравнением пары
совпадающих прямых.
и оно называется уравнением пары
совпадающих прямых.
В заключении сформулируем следующую теорему, справедливость которой следует из проведённого выше рассуждений.
Теорема 4.1. Пусть в прямоугольной системе координат задано общее уравнение линии второго порядка
![]()
Тогда существует такая прямоугольная система координат, в которой это уравнение принимает один из следующих девяти канонических видов:
 – эллипс;
– эллипс; - мнимый эллипс;
- мнимый эллипс; - пара мнимых пересекающихся прямых;
- пара мнимых пересекающихся прямых; - гипербола;
- гипербола; - пара пересекающихся прямых;
- пара пересекающихся прямых; парабола;
парабола; - пара параллельных прямых;
- пара параллельных прямых;- пара мнимых параллельных прямых;
- пара совпадающих прямых.