

4.3.4 Нулевой метод
Этот метод является развитием дифференциального метода. В отличие от последнего результирующий эффект от одновременного воздействия измеряемой величины и величины, воспроизводимой мерой на устройство сравнения (компаратора) доводят до нуля. В этом случае за счет применения высокочувствительного нуль-индикатора повышается точность измерения по сравнению с дифференциальным методом, поскольку выражение для погрешности (4.19) практически трансформируется в выражение
![]() .
.
Нулевым методом измеряют сопротивления резисторов, емкости конденсаторов, индуктивности катушек с помощью одинарных и двойных мостов постоянного и переменного тока.
Перечисленные методы могут встречаться на практике как непосредственно, так и в виде их модификаций. В различных сочетаниях эти методы лежат в основе функционирования современных СИТ, позволяющих производить автоматическую коррекцию погрешности.
4.4 Обобщенные структурные схемы сит
Современные СИТ состоят из совокупности ИУ и СИ, соединенных в различных сочетаниях с целью реализации того или иного метода измерения. Соединение этих звеньев в определенную цепь преобразований носит название структурной схемы. Структурные схемы очень разнообразны. Однако все они соответствуют двум основным видам структурных схем: прямого и уравновешивающего преобразования.
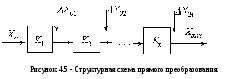
4.4.1 Схема прямого преобразования
По этой схеме построены многие СИТ. Отличительная особенность этой схемы состоит в том, что преобразование измерительного сигнала производится в прямом направлении (рис. 4.5).
Если коэффициенты преобразования
отдельных звеньев равны
![]() ,
то общий коэффициент преобразования
будет равен
,
то общий коэффициент преобразования
будет равен
![]() (4.20)
(4.20)
и уравнение всего измерительного преобразования имеет вид
![]() . (4.21)
. (4.21)
На работу измерительного прибора будут
оказывать влияние нестабильность
коэффициентов преобразования
![]() ,
а также дрейф нуля, помехи и наводки
,
а также дрейф нуля, помехи и наводки![]() .
.
Оценим влияние этих погрешностей на результирующую погрешность СИТ.
Абсолютная погрешность измерения
выходной величины
![]() ,
обусловленная нестабильностью
коэффициентов преобразования, может
быть получена суммированием частных
производных выражения (4.21), умноженных
на соответствующие нестабильности
,
обусловленная нестабильностью
коэффициентов преобразования, может
быть получена суммированием частных
производных выражения (4.21), умноженных
на соответствующие нестабильности![]()
![]() .
.
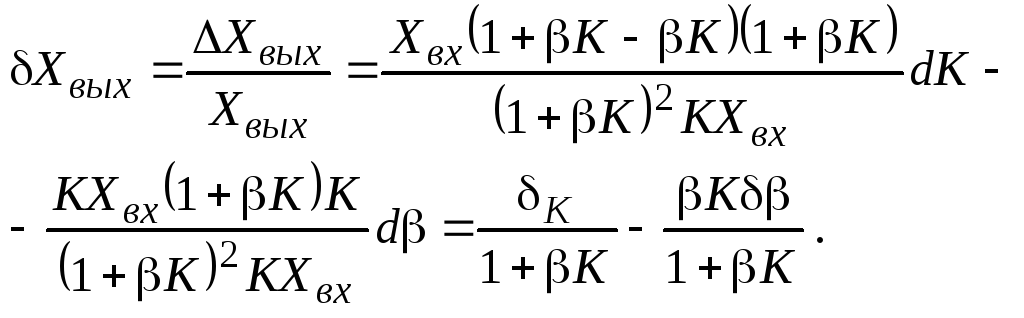
Отсюда можно найти относительную погрешность преобразования
![]() ,
,
т.е. результирующая погрешность равна сумме относительных погрешностей преобразования.
Оценим теперь погрешность, обусловленную дрейфом нуля и наводками. Очевидно, она будет равна
![]() ,
,
таким образом, погрешность, вносимая первым преобразователем, умножается на все последующие коэффициенты преобразования. Поэтому именно к первичному преобразователю при проектировании СИТ предъявляются наиболее жесткие требования по точности и стабильности. Для достижения высокой стабильности всего СИТ требуется высокая стабильность всех входящих в него звеньев.
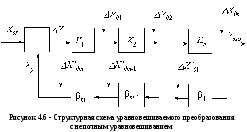
4.4.2 Структурная схема уравновешенного преобразования
Особенность схемы (рис. 4.6) состоит в
том, что выходная величина
![]() подвергается обратному преобразованию
в величину
подвергается обратному преобразованию
в величину![]() ,
однородную с входной величиной
,
однородную с входной величиной![]() и почти полностью уравновешивает её, в
результате чего на вход цепи прямого
преобразования поступает только
небольшая часть
и почти полностью уравновешивает её, в
результате чего на вход цепи прямого
преобразования поступает только
небольшая часть![]() преобразуемой величины
преобразуемой величины![]() .
Другими словами, используется отрицательная
обратная связь.
.
Другими словами, используется отрицательная
обратная связь.
Возможны два режима работы схемы: режим неполного уравновешивания и режим полного уравновешивания.
1.Режим неполного уравновешивания.
В этом режиме входная
![]() и уравновешивающая
и уравновешивающая![]() величины образуют разность
величины образуют разность![]() .
.
Уравнение цепей прямого и обратного
преобразования будут иметь вид,
соответственно
![]() и
и![]() ,
где
,
где![]()
![]() .
Отсюда имеем
.
Отсюда имеем
![]() . (4.22)
. (4.22)
Производя перегруппировку, получаем
![]() или
или
![]() . (4.23)
. (4.23)
Коэффициент преобразования уравновешивающего СИ будет равен
![]() .
(4.24)
.
(4.24)
При
![]()
![]() ,
т.е. цепь прямого преобразования слабо
влияет на работу прибора, однако его
чувствительность падает в (1+
,
т.е. цепь прямого преобразования слабо
влияет на работу прибора, однако его
чувствительность падает в (1+![]() K)
раз.
K)
раз.
Определим относительную погрешность,
обусловленную нестабильностью
коэффициентов преобразования
![]() и
и![]() для этой схемы. Для этого продифференцируем
выражение (4.23) по
для этой схемы. Для этого продифференцируем
выражение (4.23) по![]() и
и![]()
![]() (4.25)
(4.25)
и деля его на
![]() ,
получаем
,
получаем
 (4.26)
(4.26)
Таким образом, относительная погрешность
состоит из суммы двух членов, один из
которых пропорционален суммарной
погрешности всех преобразователей цепи
прямого преобразования, а другой –
суммарной погрешности преобразования
цепи обратной связи. Причем погрешность
от нестабильности цепи
![]() уменьшается в
уменьшается в![]() раз, а погрешность, обусловленная
нестабильностью цепи обратной связи,
почти полностью входит в суммарную
погрешность. Действительно, при
раз, а погрешность, обусловленная
нестабильностью цепи обратной связи,
почти полностью входит в суммарную
погрешность. Действительно, при![]()
![]() .
Следовательно, в прямой цепи можно
использовать нестабильные преобразователи,
необходимо только, чтобы
.
Следовательно, в прямой цепи можно
использовать нестабильные преобразователи,
необходимо только, чтобы![]() и коэффициент обратного преобразования
имел высокую стабильность. Необходимо
учитывать, что введением обратного
преобразования в
и коэффициент обратного преобразования
имел высокую стабильность. Необходимо
учитывать, что введением обратного
преобразования в![]() раз уменьшается чувствительность
измерительного устройства. Для её
сохранения коэффициент
раз уменьшается чувствительность
измерительного устройства. Для её
сохранения коэффициент![]() нужно увеличить в
нужно увеличить в![]() раз. При этом могут возникнуть условия
для самовозбуждения СИТ. Поэтому предел
увеличения
раз. При этом могут возникнуть условия
для самовозбуждения СИТ. Поэтому предел
увеличения![]() определяется динамической устойчивостью
прибора.
определяется динамической устойчивостью
прибора.
Необходимо отметить, что нелинейность
функции прямого преобразования можно
рассматривать как изменение коэффициента
преобразования
![]() относительно номинального значения.
относительно номинального значения.
Это изменение может быть вызвано и другими причинами: вариацией параметров окружающей среды (температуры, давления, влажности), инерционностью звеньев, механическими воздействиями (вибрацией, тряской) и т.п. Введение обратного преобразования одинаково уменьшает влияние всех вышеперечисленных причин.
Оценим погрешность, обусловленную
дрейфом нуля, наводками и т.п. Для этого
введем в схему дополнительные сигналы
![]()
![]() .
Приводя эти сигналы к входу схемы,
получаем
.
Приводя эти сигналы к входу схемы,
получаем
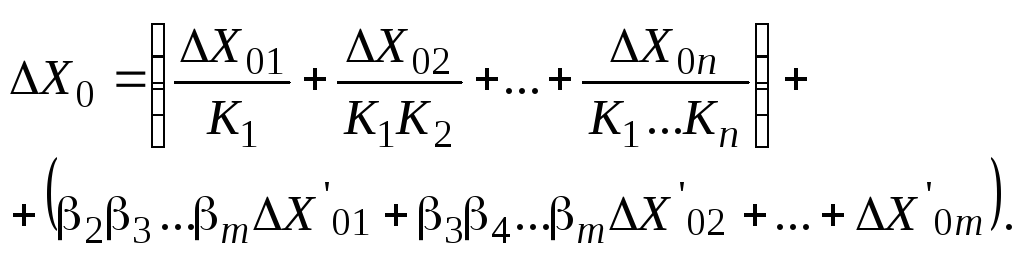 (4.27)
(4.27)
Из этого выражения видно, что аддитивная погрешность не зависит от глубины обратной связи и не может быть уменьшена по абсолютной величине введением схемы уравновешивающего преобразования.
Наибольшее требование по минимальному дрейфу нуля предъявляется к первому прямому и первому обратному преобразователю.