2.3.1. Содержание задания
Рассчитать паpаметpы диаграмм движения толкателя, вывести (если это необходимо для построения диаграмм) их уравнения и вычеpтить диагpаммы;
выбpать паpаметpы, необходимые для получения механизма наименьших pазмеpов (линейные pазмеpы, выбираемые проектиров-щиком, окpуглить до кpатных 5 мм);
вычертить профиль кулачка;
вычертить диаграмму углов давления для механизма с роликовым толкателем или диаграмму радиусов кривизны профиля кулачка для механизма с плоским толкателем.
Примечание. В задании по этому разделу исходные данные шифруются в виде в - 3 - 08 - 2163, что означает:
|
в |
- обозначение схемы механизма; |
| |
|
3 |
- вариант исходных данных (табл. 2.4 - 2.6); |
| |
|
08 |
- сочетание фазовых углов (табл. 2.7); |
| |
|
2163 |
- обозначение закона движения (номера ячеек табл. 2.8). |
| |
|
|
|
| |
|
2.3.2. Схемы кулачковых механизмов и исходные данные |
| ||
|
а) Механизм с движущимся поступательно роликовым толкателем | |||
|
Табл. 2.4 | |||
|
|
| ||
|
|

Примечание:
на схеме показаны положительные
направления угловой скорости кулачка
![]() и эксцентриситетаe.
и эксцентриситетаe.
Продолжение табл. 2.4
|
Наименование параметра |
Варианты исходных данных |
| |||||||||||||||||||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
| |||||||||||||||||
|
Ход толкателя H, мм |
40 |
42 |
45 |
47 |
50 |
40 |
42 |
45 |
47 |
50 |
| ||||||||||||||||
|
Эксцентриситет e, мм |
10 |
-8 |
- |
0 |
- |
0 |
8 |
- |
-10 |
-8 |
| ||||||||||||||||
|
Направление вращения кулачка |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
| ||||||||||||||||
|
Наибольшие углы давления, градусы |
при
подъеме
|
30 |
35 |
30 |
35 |
30 |
35 |
30 |
35 |
30 |
35 |
| |||||||||||||||
|
при
опускании
|
40 |
45 |
40 |
45 |
40 |
45 |
40 |
45 |
40 |
45 |
| ||||||||||||||||
|
|
| ||||||||||||||||||||||||||
|
б) Механизм с коромысловым роликовым толкателем Табл. 2.5 |
| ||||||||||||||||||||||||||
|
|
При
построении профиля кулачка считать
заданным направление угловой скорости
кулачка
Длина
коромысла L
задана, а
межосевое расстояние a
и теоретический минимальный радиус
Примечание: на схеме показано положительное направления угловой скорости кулачка. |
| |||||||||||||||||||||||||
|
Наименование параметра |
Варианты исходных данных | ||||||||||||||||||||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | ||||||||||||||||||
|
Ход толкателя y, градусы |
28 |
32 |
36 |
28 |
32 |
36 |
28 |
32 |
36 |
30 | |||||||||||||||||
|
Длина коромысла L, мм |
115 |
130 |
125 |
120 |
130 |
125 |
130 |
125 |
120 |
130 | |||||||||||||||||
|
Направление вращения кулачка |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- | |||||||||||||||||
|
Наибольшие углы давления, градусы |
при
подъеме
|
30 |
35 |
30 |
35 |
30 |
35 |
30 |
35 |
30 |
35 | ||||||||||||||||
|
при
опускании
|
40 |
45 |
40 |
45 |
40 |
45 |
40 |
45 |
40 |
45 | |||||||||||||||||
|
|
|
| |||||||||||||||||||||||||

|
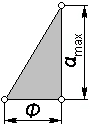
в) Механизм с движущимся поступательно плоским толкателем | |||||||||||
|
Табл. 2.6 | |||||||||||
|
|
При
построении профиля кулачка учесть
направление и величину эксцентриситета
e,
угла передачи g,
а также направление угловой скорости
Примечание:
на схеме показаны положительные
направления угловой скорости кулачка
| ||||||||||
|
Наименование параметра |
Варианты исходных данных | ||||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | ||
|
Ход толкателя H, мм |
40 |
42 |
45 |
47 |
50 |
40 |
42 |
45 |
47 |
50 | |
|
Эксцентриситет e, мм |
10 |
- 8 |
- |
0 |
- |
8 |
-10 |
0 |
- |
- | |
|
Угол передачи g, градусы |
90 |
90 |
90 |
90 |
90 |
90 |
70 |
110 |
110 |
70 | |
|
Направление вращения кулачка |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- | |

|
2.3.2.1. Фазовые углы поворота кулачка Табл. 2.7 | |||||||
|
№№ вариантов |
\EMBED
Equation
|
|
|
\EMBED
Equation
|
\EMBED
Equation
|
\EMBED
Equation
|
\EMBED
Equation
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
01 |
80 |
30 |
60 |
30 |
70 |
20 |
50 |
|
02 |
60 |
30 |
80 |
30 |
60 |
20 |
50 |
|
03 |
80 |
30 |
80 |
30 |
40 |
20 |
50 |
|
04 |
80 |
20 |
70 |
20 |
70 |
30 |
50 |
|
05 |
70 |
20 |
80 |
20 |
50 |
30 |
70 |
|
06 |
80 |
20 |
80 |
20 |
55 |
20 |
65 |
|
07 |
90 |
30 |
50 |
30 |
65 |
20 |
55 |
|
08 |
50 |
30 |
90 |
30 |
50 |
30 |
60 |
|
09 |
90 |
30 |
90 |
30 |
40 |
15 |
45 |
|
10 |
90 |
20 |
50 |
20 |
65 |
15 |
50 |
|
11 |
50 |
20 |
90 |
20 |
70 |
20 |
50 |
|
12 |
90 |
20 |
90 |
20 |
60 |
20 |
40 |
|
13 |
80 |
0 |
60 |
20 |
40 |
20 |
60 |
|
14 |
60 |
0 |
80 |
30 |
45 |
20 |
55 |
Продолжение табл. 2.7
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
15 |
80 |
0 |
80 |
40 |
50 |
20 |
60 |
|
16 |
80 |
0 |
70 |
20 |
60 |
20 |
50 |
|
17 |
70 |
0 |
80 |
30 |
60 |
0 |
60 |
|
18 |
80 |
0 |
80 |
40 |
70 |
0 |
50 |
|
19 |
90 |
0 |
50 |
20 |
50 |
0 |
70 |
|
20 |
50 |
0 |
90 |
30 |
65 |
0 |
55 |
|
21 |
90 |
0 |
90 |
40 |
55 |
0 |
65 |
|
22 |
90 |
0 |
50 |
20 |
50 |
30 |
50 |
|
23 |
50 |
0 |
90 |
30 |
50 |
20 |
50 |
|
24 |
90 |
0 |
90 |
40 |
50 |
0 |
50 |
|
25 |
80 |
30 |
60 |
20 |
50 |
20 |
70 |
|
2.3.2.2.
Законы
изменения модуля аналога ускорения
| Табл. 2.8 | |||
|
|
1 - Модуль уско-рения постоянен |
|
2 - Модуль ус-корения линейно возрастает |
|
|
3 - Модуль ус-корения линейно убывает |
|
4 - Модуль уско-рения возрастает по закону синуса |
|
|
5 - Модуль уско-рения убывает по закону косинуса |
|
6 - Модуль уско-рения изменяется по закону полу-волны синусоиды |