Шпоры по ТММ
.doc|
1.Основные понятия. Механизм – это система тел, предназначенная для преобразования движения одного или нескольких тел в требуемое движение других тел.Машина – это устройство, выполняющее механические движения для преобразования энергии, материалов или информации, с целью облегчения умственного и физического труда чел-ка.Различают группы машин: энергетические, технологические, транспортные, информационные, кибернетические, машина-автомат, автоматическая линия.Звено – это одно или несколько жестко соединенных тел, входящих в состав механизма.В каждом механизме имеется стойка (звено неподвижное или принимаемое за неподвижное).Звенья подразделяются на:неподвижные(стойка, неподв. направляющая) и подвижные(кривошип-звено, совершающее полный оборот вокруг неподвижной стойки; шатун-звено шарнирно связанное с другими звеньями мех-ма и совершающие сложные движения; коромысло-звено, совершающее колебательное движение вокруг стойки в пределах какого либо угла; ползун-звено, совершающее поступательные перемещения по неподвижной направляющей; кулисная пара-1.кулиса-звено, соверш. вращ. или колеб. движ. вокруг неподвиж. стойки 2.камень кулисы-звено, совершающее поступательное перемещение по подвижной направляющей; кулачок-звено, имеющее криволинейный профиль и полностью определяющее движение звена на выходе; зубч. колесо- это вращающее звено, имеющее нарезанные зубья, которые обеспечивают непрерывное движ. парных звеньев) Кинематическая пара – это подвижное соединение двух звеньев, допускающее вполне определенное относ. движение.По характеру соприкосновения звеньев различают низшие и высшие кинематические пары. Низшие пары могут быть выполнены соприкосновением звеньев по поверхностям или по плоскостям.Высшие – соприкосновением по линиям или в точках.Кинематическая цепь – это система звеньев, связанных между собой кинематическими парами.Кинематические цепи могут быть:простыми (цепь, в которой каждое звено входит не более чем в 2 кин. пары) и сложными ( цепь, в которой хотя бы одно из звеньев образует более 2 кин.пар). |
2. Основные виды механизмов: 1)Рычажный-механизм, состоящий из кинематических пар только 5 класса 2) Фрикционный-механизмы, в которых используются силы трения В целом ряде механизмов, применяемых в современной технике, используются силы трения в качестве сил, приводящих в движение звенья, или сил, тормозящих их движения. Механизмы, в которых используются силы трения, носят название фрикционных 3) Ременные и цепные передачи Механизмы передач с гибкими звеньями Механизмы передач с гибкими звеньями широко применяются в некоторых отраслях техники. достаточно указать на передачи ременные, канатные, цепные и др. При передаче движения гибким звеном посредством круглых шкивов передаточное отношение равно U12=r2/r1 т. е. передаточное отношение равно обратному отношению радиусов шкивов. Передачи с гибкими звеньями широко применяются также и в виде цепных передач, в которых зубчатые звездочки входят в зацепление со звеньями цепи. Такие механизмы применяются в сельскохозяйственных машинах, транспортерах, горных машинах и др. 4) Зубчатые Механизмы трехзвенных зубчатых передач с неподвижными осями 1. Самое широкое применение в машинах и приборах находят зубчатые механизмы. Каждое колесо представляет собой круглый цилиндр,на поверхности которого расположены зубья. Два зубчатых колеса, находящихся в соприкосновении, своими зубьями образуют зубчатое зацепление. 5) Кулачковые Основные типы плоских кулачковых механизмов Разобьем кулачковые механизмы в зависимости от движения выходного звена на следующие три вида: 1) выходное звено движется поступательно; 2) выходное звено вращается; 3) выходное звено совершает сложное движение.
|
|
3) Кинематические цепи. Кинематические соединения Классификация кинематических пар. Кинематические пары (КП) классифицируются по следующим признакам: 1. по виду места контакта (места связи) поверхностей звеньев: • низшие, в которых контакт звеньев осуществляется по плоскости или поверхности ( пары скольжения ); • высшие, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием). 2. по относительному движению звеньев, образующих пару: • вращательные; • поступательные; • винтовые; • плоские; • сферические. 3. по способу замыкания (обеспечения контакта звеньев пары): • силовое (за счет действия сил веса или силы упругости пружины); • геометрическое (за счет конструкции рабочих поверхностей пары). 1. по числу условий связи, накладываемых на относительное движение звеньев ( число условий связи определяет класс кинематической пары ); 2. по числу подвижностей в относительном движении звеньев. Кинематическая цепь – это система звеньев, связанных между собой кинематическими парами.Кинематические цепи могут быть:простыми (цепь, в которой каждое звено входит не более чем в 2 кин. пары) и сложными ( цепь, в которой хотя бы одно из звеньев образует более 2 кин.пар).
|
4) Механизмы плоские и пространственные. Число свободы механизма и его определение. Плоский механизм- мех. , в котором все точки и звенья перемещаются в плоскостях // между собой. Пространственный мех.- мех., в котором все точки и звенья перемещаются в плоскостях не // между собой. W число степеней свободы мех-ма. W=1 – для плоских мех-мов Wне= 1 – для пространственных мех-мов Определение числа степеней свободы мех-ма W=3*n-2*P5-P4- формула Чебышева для плоских мех-мов. W-число степеней свободы n-число подвижных звеньев Р5-число пар 5-го класса мех-ма Р4-число пар 4-го класса мех-ма Для плоских мех-мов если Wне= 1 то допущена ошибка, либо присутствуют звенья, создающие лишнюю степень свободы. |
|
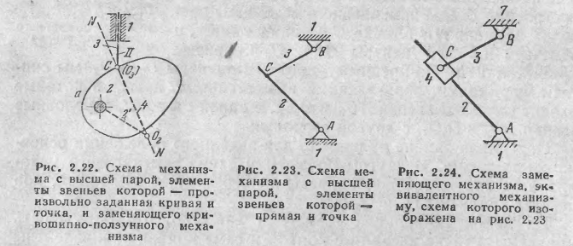
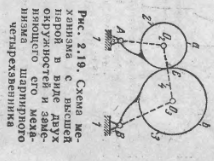
7) Замена в плоских механизмах высших пар низшимиПри изучении структуры и кинематики плоских механизмов во многих случаях удобно заменять высшие пары кинематическими цепями или звеньями, входящими только в низшие вращательные и поступательные пары 5 класса. При этой замене должно удовлетворяться условие, чтобы механизм, полученный после такой замены, обладал прежней степенью свободы и чтобы сохранились относительные в рассматриваемом положении движения всех его звеньев. Рассмотрим трехзвенный механизм, показанный на рис. 2.19. Механизм состоит из двух подвижных звеньев 2 и 3, входящих во вращательные пары 5 класса А и В со стойкой 1 и высшую пару С 4 класса, элементы звеньев а и b которой представляют собою окружности радиусов 02С и 03С. Согласно формуле (2.5) степень свободы механизма будет = 1. W=3*n-2*P5-P4=3*2-2*2-1=1 Можно показать, что рассматриваемый механизм может быть заменен эквивалентным ему механизмом шарнирного четырехзвенника А0203В. Высшая нара 4 класса в точке С заменяется звеном 4, входящим в точках 02 и О3 во вращательные пары 5 класса. Полученный в результате замены механизм А0203B называется заменяющим механизмом. Степень свободы ‚W заменяющего механизма будет той же, что и у заданного механизма. Имеем W=Зn—2р5=З*3—2*4= 1. Так как элементы а и b звеньев являются окружностями с центрами в точках 02 и О3, то длина 0203 звена 4 оказывается постоянной. Точно так же будут постоянными и длины АО2 и ВО2 звеньев 2 и З. Заменяющий механизм А0203В эквивалентен заданному и с точки зрения законов движения звеньев2 и З. Рассмотренный способ получения заменяющего механизма можно обобщить. Пусть задан механизм с высшей парой, элементы звеньев которой представляют собой произвольно заданные кривые а и b (рис. 2.20). для построения схемы заменяющего механизма про водим нормаль NN в точке С касания кривых и отмечаем на ней центры 02 и О3 кривизны кривых а и b. По-прежнему центры кривизны 02 и О3 мы считаем шарнирами, образующими вращательные пары, в которые входят условные звенья АО2 и 0203, с одной стороны, и условные звенья ВО3 и 0203, с другой стороны. Описанная замена правильна для заданного положения основного механизма. В другом положении схема заменяющего механизма останется той же, размеры же его звеньев изменятся, ибо центры кривизны 02 и О3 сместятся. Из дифференциальной геометрии известно, что окружность кривизны в точке касания с кривой и сама кривая эквивалентны до производных второго порядка включительно, и поэтому заменяющий механизм эквивалентен основному в такой же степени, т. е. положения, скорости и ускорения одноименных точек того и другого механизма будут одинаковыми.Если один из соприкасающихся элементов будет представлять собой некоторую кривую, а второй прямую b (рис. 2.21), то центр крпвизны второго профиля будет бесконечно удален. Условное звено 4 в этом случае будет входить в центре кривизны 02 элемента 2 во вращательную пару 5 класса. Вторая вращательная пара, в которую должно входить звено 3, имеет ось вращения бесконечно удаленной и переходит в поступательную пару также 5 класса. далее возможен случай, когда один из соприкасающихся элементов -- кривая а, а другой — точка С (рис. 2.22). В этом случае центр кривизны О элемента С совпадает с самой точкой С и поэтому условное звено 4 должно ВХОДИТЬ в две вращательные пары 5 класса — во вращательную пару с осью, проходящей через центр кривизны 02 криволинейного элемента а, и во вращательную пару с осью, проходящей через точку С. В том случае, когда одним элементом является прямая АС, а другим — точка С (рис. 2.23), замена сводится к постановке условного звена 4, входящего в одну поступательную и одну вращательную пары. Ось вращательной пары и ось движения поступательной пары должны проходить через точку соприкосновения С. Заменяющий механизм показан на рис. 2.24. Таким образом, любой плоский механизм с высшими парами 4 класса может быть заменен механизмом, в состав которого входят только низшие кинематические пары 5 класса.Если все высшие пары 4 класса в плоском механизме заменены низшими парами, то структурная формула (2.5) для заменяющего механизма получит вид W=3n-2P5 |
|
|
17) Задачи динамического анализа машин и механизмов.При рассмотрении вопросов кинематического анализа механизмов мы всегда предполагаем движение входных звеньев заданным. Движение выходных звеньев изучается в зависимости от заданного движения входных. При этом силы, действующие на звенья механизма, и силы, возникающие при его движении, нами не изучаются. Таким образом, при кинематическом анализе исследование движения механизмов ведется с учетом только структуры механизмов и геометрических соотношений между размерами их звеньев. динамический анализ механизмов имеет своими задачами: а) изучение влияния внешних сил, сил веса звеньев, сил трения и массовых сил (сил инерции) на звенья механизма, на элементы звеньев, на кинематические пары и неподвижные опоры и установление способов уменьшения динамических нагрузок, возникающих при движении механизма; б) изучение режима движения механизма под действием заданных сил и установление способов, обеспечивающих заданные режимы движения механизма. Первая задача носит название силового анализа механизмов, а вторая задача — название динамики механизмов. В динамический анализ механизмов может быть включен и ряд других задач, имеющих важное техническое значение, а именно: теория колебаний в механизмах, задача о соударении звеньев механизмов и др. Но эти вопросы являются предметом изучения в специальных курсах, так как при решении их необходимо применять методы теории упругости, а в теории механизмов и машин задачи решаются обычно в предположении, что звенья механизмов являются абсолютно жесткими. Первая из указанных задач динамики механизмов имеет своей целью определение внешних неизвестных сил, действующих на звенья механизма, а также усилий (реакций), возникающих в кинематических парах при движении механизма. К внешним силам, например, относятся давление рабочей смеси (газа или жидкости) на поршень кривошипно-ползунного механизма двигателя внутреннего сгорания, парового двигателя, компрессора, вращающий момент, развиваемый электродвигателем на валу рабочего механизма, и др. Некоторые силы возникают в результате движения механизма. К этим силам, например, относятся силы трения при движении, силы сопротивления среды и т. д. Некоторые силы, как, например, динамические реакции в кинематических парах, возникают при движении вследствие инерции звеньев. Изучение природы СИЛ требует не только теоретического, но и экспериментального исследования. С помощью современных измерительных приборов можно весьма точно определять различные силы, действующие на отдельные звенья механизма, и выявлять их зависимости от различных факторов. Если известны внешние силы, действующие на звенья механизма, и известны законы движения всех его звеньев, то можно методами, излагаемыми в механике, определить силы трения и реакции связей в кинематических парах, силы сопротивления среды, силы инерции звеньев и другие силы, возникающие при движении механизма, и тем самым произвести так называемый силовой расчет механизма. К первой задаче динамического анализа механизмов относится также вопрос об устранении дополнительных динамических нагрузок от сил инерции на опоры механизма соответствующим подбором масс звеньев. Этот вопрос рассматривается в теории уравновешивания масс в механизмах. Вторая задача имеет своей целью определение мощности, не обходимой для воспроизведения заданного движения машины или механизма, я изучение законов распределения этой мощности на выполнение работ, связанных с действием различных сил на механизм, а также решение вопроса о сравнительной оценке механизмов с помощью коэффициента полезного действия, характеризующего степень использования общей энергии, потребляемой машиной или механизмом, на полезную работу. К этой же задаче относится вопрос об определении истинного движения механизма под действием приложенных к нему сил, т. е. задачи о режиме его движения, а также вопрос о подборе таких соотношений между силами, массами и размерами звеньев механизма или машины, при которых движение механизма или машины было бы наиболее близким к требуемому условию рабочего процесса. Эта задача обычно носит название теории движения машины или механизма под действием заданных сил |
9) Понятие термина машина, классификация машин Понятие машина может быть в обобщенном виде выражено следующим, образом: машина есть устройство, создаваемое человеком для использоваания законов природы с целью облегчения физического и умственного труда, увеличения его производительности облегчения путем частичной или полной замены человека в его трудовых и фазиологичских функциях. В более краткой форме понятие машина может быть также определено следующим образом: машина есть устройство, выполняющее механические движения для преобразоваания энергии, материалов информации в целях замены или облегчения физического и умственного труда человека. С точки зрения выполняемых машинами функций машины можно разделить на следующие классы: а) энергетические машины б) рабочие машины в) информационные машины г) кибернетические машины Энергетической машиной называется машина, предназначенная для преобразования любого вида энергии в механическую (и наоборот). В первом случае она носит название машины-двигателя,а во втором случае машины-генератора. Рабочей машиной называется машина, предназначенная для преобразования материалов. Рабочие машины подразделяются на транспортные и технологические машины Транспортной машиной называется рабочая машина, в которой преобразование материала состоит только в изменении положения основного перемещаемого объекта. Технологической машиной называется рабочая машина, в которой преобразование материала состоит в изменении формы, свойства в состояния материала или обрабатываемого объекта. Информационной машиной называется машина для получения и преобразования информации. Информационные машины подразделяются на контрольно-управляющие и математические машины Контрольно-управляющей машиной называется машина, которая преобразует получаемую контрольно-измерительную информацию с целью управления энергетической или рабочей машинами. Математической машиной называется машина, которая преобразует информацию, получаемую в виде различных математических образов, заданных в форме отдельных чисел или алгоритмов. Кибернетической машиной называется машина, заменяющая или имитирующая различные механические, физиологические или биологические процессы, присущие чел-ку и живой природе, и обладающая элементами искусственного интелекта. Примерами энергетических машин являются электрические двигатели, двигатели внутреннего сгорания, турбины и т. д. К транспортным машинам относятся локомотивы, турбовозы, автомобили, тракторы, лифты, транспортеры. |
|
2
|

 1)
Механические
передачи(редукторы,мультипликаторы,коробки
скоростей,вариаторы,фрикционные
передачи). К
сложным зубчатым механизмам относятся
также зубчатые коробки передач.
Зубчатой коробкой передач называется
зубчатый механизм, передаточное
отношение которого можно изменять
скачкообразно по ступеням. Коробками
передач снабжаются те машины, рабочие
органы которых должны вращаться с
различными скоростями в зависимости
от условий работы. Например, обработка
различных деталей на токарном станке
производится при разных скоростях,
поэтому в механизм токарного станка
включается коробка передач. Коробки
передач применяются в автомобилях
для получения различных скоростей
движения автомобиля. Схема и
конструктивное оформление коробок
передач бывают чрезвычайно разнообразными.
Если число ступеней регулирования
скорости невелико, то схема коробки
получается достаточно простой, при
большом же числе ступеней регулирования
как схема, так и конструктивное
оформление могут быть весьма сложными.
Коробка передач состоит из зубчатых
колес, которые могут быть введены в
зацепление в различных комбинациях
для получения передаточных отношений,
соответствующих заданным скоростям
вращения рабочего органа машины.
Способы переключения отдельных колес
для получения различных передаточных
отношений разнообразны, зависят от
конструктивного оформления коробки
Механизмы, осуществляющие плавное
изменение передаточного отношения,
называются механизмами бесступенчатых
передач или вариаторами скоростей.
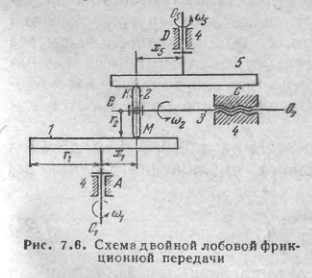
На рис. 7.6 показан механизм бесступенчатой
передачи с двумя дисками 1 и 5 и
промежуточным роликом 2. Передаточное
отношение U51
между параллельными осями 01 и О5 равно
U51=w5/w1=x1/x5
т. е. передаточное отношение не зависит
от радиуса ролика 2. Направление
вращения осей О1 и О5 одинаковое.
Передаточное отношение U51
можно изменять в пределах
Х1мин/Х5макс<=U51<=Х1макс/Х5мин
Передаточный механизмы, которые
понижают скорость на выходе наз.
редукторами. Передаточный механизмы,
которые увеличивают скорость на выходе
наз. мультипликаторами. Изменение
числа оборотов может быть ступенчатым
и неступенчатым. Механизмы со ступенчатым
изменением числа оборотов:коробка
скоростей,передач. Механизмы с
неступенчатым изменением числа
оборотов:вариатор. Механизмы позволяющие
изменять на выходном валу направление
на противоположное без изменения
вращения ведущего звена наз. реверсивными.
Если направление вращения на входном
и выходном валу совпадают-передача
положительная, не совпадают-отрицательные.
Знаки плюс и минус-условные. Фрикционные
передачи-это передачи движение которых
осуществляется за счёт сил трения.
1)
Механические
передачи(редукторы,мультипликаторы,коробки
скоростей,вариаторы,фрикционные
передачи). К
сложным зубчатым механизмам относятся
также зубчатые коробки передач.
Зубчатой коробкой передач называется
зубчатый механизм, передаточное
отношение которого можно изменять
скачкообразно по ступеням. Коробками
передач снабжаются те машины, рабочие
органы которых должны вращаться с
различными скоростями в зависимости
от условий работы. Например, обработка
различных деталей на токарном станке
производится при разных скоростях,
поэтому в механизм токарного станка
включается коробка передач. Коробки
передач применяются в автомобилях
для получения различных скоростей
движения автомобиля. Схема и
конструктивное оформление коробок
передач бывают чрезвычайно разнообразными.
Если число ступеней регулирования
скорости невелико, то схема коробки
получается достаточно простой, при
большом же числе ступеней регулирования
как схема, так и конструктивное
оформление могут быть весьма сложными.
Коробка передач состоит из зубчатых
колес, которые могут быть введены в
зацепление в различных комбинациях
для получения передаточных отношений,
соответствующих заданным скоростям
вращения рабочего органа машины.
Способы переключения отдельных колес
для получения различных передаточных
отношений разнообразны, зависят от
конструктивного оформления коробки
Механизмы, осуществляющие плавное
изменение передаточного отношения,
называются механизмами бесступенчатых
передач или вариаторами скоростей.
На рис. 7.6 показан механизм бесступенчатой
передачи с двумя дисками 1 и 5 и
промежуточным роликом 2. Передаточное
отношение U51
между параллельными осями 01 и О5 равно
U51=w5/w1=x1/x5
т. е. передаточное отношение не зависит
от радиуса ролика 2. Направление
вращения осей О1 и О5 одинаковое.
Передаточное отношение U51
можно изменять в пределах
Х1мин/Х5макс<=U51<=Х1макс/Х5мин
Передаточный механизмы, которые
понижают скорость на выходе наз.
редукторами. Передаточный механизмы,
которые увеличивают скорость на выходе
наз. мультипликаторами. Изменение
числа оборотов может быть ступенчатым
и неступенчатым. Механизмы со ступенчатым
изменением числа оборотов:коробка
скоростей,передач. Механизмы с
неступенчатым изменением числа
оборотов:вариатор. Механизмы позволяющие
изменять на выходном валу направление
на противоположное без изменения
вращения ведущего звена наз. реверсивными.
Если направление вращения на входном
и выходном валу совпадают-передача
положительная, не совпадают-отрицательные.
Знаки плюс и минус-условные. Фрикционные
передачи-это передачи движение которых
осуществляется за счёт сил трения.1234
|
5
|
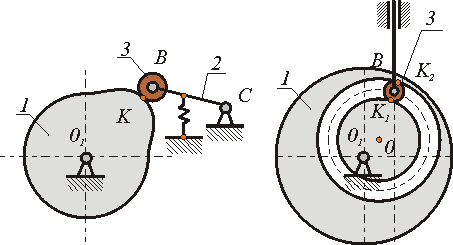
40 Кулачковые механизмы: Кулачковым называется трехзвенный механизм с высшей кинематической парой входное звено которого называется кулачком, а выходное - толкателем (или коромыслом). Часто для замены в высшей паре трения скольжения трением качения и уменьшения износа, как кулачка, так и толкателя, в схему механизма включают дополнительное звено - ролик и вращательную кинематическую пару. Подвижность в этой кинематической паре не изменяет передаточных функций механизма и является местной подвижностью. Назначение и область применения: Кулачковые механизмы предназначены для преобразования вращательного или поступательного движения кулачка в возвратно-вращательное или возвратно-поступательное движение толкателя. При этом в механизме с двумя подвижными звеньями можно реализовать преобразование движения по сложному закону. Важным преимуществом кулачковых механизмов является возможность обеспечения точных выстоев выходного звена. Это преимущество определило их широкое применение в простейших устройствах цикловой автоматики и в механических счетно-решающих устройствах (арифмометры, календарные механизмы). Кулачковые механизмы можно разделить на две группы. Механизмы первой обеспечивают перемещение толкателя по заданному закону движения. Механизмы второй группы обеспечивают только заданное максимальное перемещение выходного звена - ход толкателя. При этом закон, по которому осуществляется это перемещение, выбирается из набора типовых законов движения в зависимости от условий эксплуатации и технологии изготовления. Классификация кулачковых механизмов: Кулачковые механизмы классифицируются по следующим признакам: по расположению звеньев в пространстве : пространственные; плоские; по движению кулачка : вращательное; поступательное; винтовое по движению выходного звена: возвратно-поступательное ( с толкателем); возвратно-вращательное ( с коромыслом) по наличию ролика: с роликом; без ролика; по виду кулачка: дисковый (плоский); цилиндрический; коноид (сложный пространственный); по форме рабочей поверхности выходного звена: плоская; заостренная; цилиндрическая; сферическая; эвольвентная; по способу замыкания элементов высшей пары: силовое; геометрическое;
П
Кулачковый механизм с силовым Кулачковый механизм с геометрическим замыканием высшей пары замыканием высшей пары |
||||||||||||||||||||
|
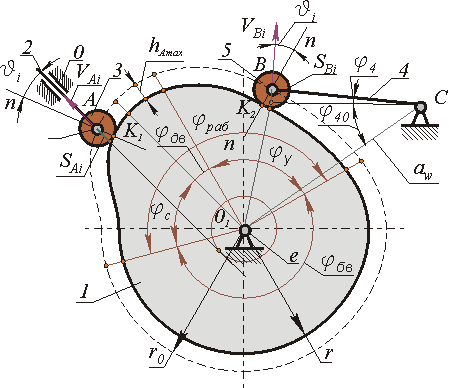
41 Основные параметры кулачкового механизма Большинство кулачковых механизмов относится к цикловым механизмам с периодом цикла равным 2. В цикле движения толкателя в общем случае можно выделить четыре фазы: удаления, дальнего стояния (или выстоя), сближения и ближнего стояния. В соответствии с этим, углы поворота кулачка или фазовые углы делятся на: угол удаления y; угол дальнего выстоя дв; угол сближения с; угол ближнего выстоя бв. Сумма трех углов образует угол раб = раб , который называется рабочим углом. раб = раб = у + дв + с .Кулачок механизма характеризуется двумя профилями: центровым (или теоретическим) и конструктивным. Под конструктивным понимается наружный рабочий профиль кулачка. Теоретическим или центровым называется профиль, который в системе координат кулачка описывает центр ролика (или скругления рабочего профиля толкателя) при движении ролика по конструктивному профилю кулачка. Фазовым называется угол поворота кулачка. Профильным углом i называется угловая координата текущей рабочей точки теоретического профиля, соответствующая текущему фазовому углу i. В общем случае фазовый угол не равен профильному ii. На рис. 17.2 изображена схема плоского кулачкового механизма с двумя видами выходного звена: внеосным с поступательным движением и качающимся (с возвратно-вращательным движением). На этой схеме указаны основные параметры плоских кулачковых механизмов
Теоретический профиль кулачка обычно представляется в полярных координатах зависимостью i = f(di), где i - радиус-вектор текущей точки теоретического или центрового профиля кулачка. |
20 Определение момента инерции маховика методом виттенбауэра Подбор момента инерции Jм маховика по заданномукоэффициенту неравномерности δ Обычно требуется определить параметры маховика при заданных значениях ωср и δ. Существует два наиболее распространенных метода определения Jм – Н.И. Мерцалова и метод Ф. Виттенбауэра. Рассмотрим более точный метод Ф. Виттенбауэра, при котором предварительно строится диаграмма энергомасс ∆Тпр(Jпр). Согласно этой диаграмме (рис.30): ω2max,min=2·μТ/μJ·tgΨmax,min, tgΨmax,min= μJ/μT·ω2max,min/2. С другой стороны из урав-нений п.5.6.: ωmax,min=ωс·(1+(-)δ/2). Таким образом, найдя Ψmax и Ψmin и проведя касательные к диаграмме энергомасс под этими углами к горизонтали (рис.30), получим в точке их пересечения начало новой системы координат с осями Т и J1пр, отстоящими от старых осей на искомую величину Jм и Т0пр. В целом последовательность определения Jм включает следующие операции: 1. Строится диаграмма Мпр(φ) для установившегося движения. 2. Строится диаграмма ∆Тпр(φ) путем графического интегрирования диаграммы Мпр(φ). 3. Строится график Jпр(φ) и диаграмма энергомасс путем исключения параметра φ из графиков ∆Тпр(φ) и Jпр(φ). 4. Определяются углы Ψmax и Ψmin, после чего находится Jм в новых координатах Тпр и J1пр диаграммы Тпр(J1пр).
|

 )
Структурный
синтез механизмов на примере плоского
механизма
Основной
принцип образования механизмов был
впервые сформулирован в 1914 г. русским
ученым Л. В. Ассуром. Им был продолжен
и развит метод образования механизмов
путем последовательного
наслоения кинематических цепей,
обладающих определенными структурными
свойствами.
Этот метод
легко проследить, рассматривая какой
либо конкретный механизм, например
механизм, показанный на рис: 3.1. Этот
механизм имеет
пять подвижных звеньев, образующих
семь кинематических пар 5 класса.
Следовательно, по формуле
Чебышева (2.5)
число его
степеней
свободы равно W=3*n-2*P5=3*5-2*7=1т.
е. механизм, показанный на рис. 3.1,
обладает одной степенью свободы.
Выберем в качестве начального звено
2. Тогда
механизм будет состоять из начального
звена 2,
обладающего
одной степенью свободы,
стойки 1
и звеньев,
образующих кинематическую цепь,
состоящую из звеньев 3,
4, 5 и 6.
Процесс
образования
этого механизма можно представить
как последовательное присоединение
к начальному звену 2
и к стойке
1 кинематической
цепи, состоящей из звеньев З
и 4.
Тогда
получим четырехзвенный механизм АВCD,
обладающий
одной степенью
свободы. Далее к
звену 4
механизма
AВСD
и стойке 1
присоединим
кинематическую цепь, состоящую из
звена 5 и
ползуна 6.
Тогда
получим шестизвенный механизм,
обладающий также одной степенью
свободы.
Нетрудно
теперь установить определенную
закономерность процесса образования
механизма. В самом деле, любой механизм
имеет одно неподвижное звено (стойку).
У механизма,
показанного на рис. З.1, стойкой будет
звено 1.
далее,
механизм должен иметь число начальных
звеньев, равное числу его степеней
свободы. В
нашем случае механизм (рис. 3.1) обладает
одним начальным звеном 2,
так как
степень свободы механизма согласно
(3.1) равна W=1
Так как после присоединения звеньев
3, 4, 5 и
б число степеней свободы всего механизма
осталось равным W=1,
то, следовательно, кинематическая
цепь, состоящая из звеньев 3,
4, 5 и 6,
присоединенных к начальному звену 2
и стойке
1, обладает
нулевой степенью свободы относительно
тех звеньев, к которым эта цепь
присоединяется. При последовательном
присоединении групп
необходимо
руководствоваться определенными
правилами. При образовании механизма
с одной степенью свободы первая группа
присоединяется свободными элементами
звеньев к начальному звену и к стойке.
Последующие группы могут присоединиться
к любым звеньям
полученного механизма только так,
чтобы звенья группы обладали
подвижностью
друг относительно
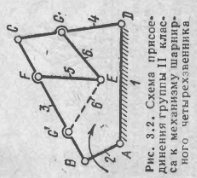
друга. Пусть,
например,мы
имеем
четырехзвенный механизм
АВСD
(рис. 3.2),
образованный
начальным
звеном 2,
стойкой 1
и группой,
состоящей из
звеньев 3 и
4. Следующая
группа, состоящая из звеньев 5
и 6,
может быть
присоединена
к любым двум разным звеньям механизма,
например к звеньям 3
и 4
(рис. 3.2), но
не к одному и тому же звену. Так,
например, если присоединить звенья 5
и 6
к одному и
тому же звену 3
(рис. 3.2). то
контур FEG’,
образованный
звеньями 3,
5 и 6, будет
жестким, т. е. будет фермой.Нетрудно
видеть, что
для того,
чтобы после
присоединения группы ее звенья имели
подвижность относительно тех звеньев,
к которым группа присоединена,
необходимо, чтобы замкнутый контур,
образованный звеньями группы и
звеньями, к которым она присоединится,
был подвижным контуром. Так, на
рис. 3.2 контур
GСFЕ
будет
обладать
подвижностью. Нетрудно видеть, что
для того, чтобы
такой контур
обладал подвижностью, необходимо,
чтобы звенья контура входили бы не
менее чем
в четыре
кинематические
пары (пары F,
Е,G
и С на рис.
3.2).
)
Структурный
синтез механизмов на примере плоского
механизма
Основной
принцип образования механизмов был
впервые сформулирован в 1914 г. русским
ученым Л. В. Ассуром. Им был продолжен
и развит метод образования механизмов
путем последовательного
наслоения кинематических цепей,
обладающих определенными структурными
свойствами.
Этот метод
легко проследить, рассматривая какой
либо конкретный механизм, например
механизм, показанный на рис: 3.1. Этот
механизм имеет
пять подвижных звеньев, образующих
семь кинематических пар 5 класса.
Следовательно, по формуле
Чебышева (2.5)
число его
степеней
свободы равно W=3*n-2*P5=3*5-2*7=1т.
е. механизм, показанный на рис. 3.1,
обладает одной степенью свободы.
Выберем в качестве начального звено
2. Тогда
механизм будет состоять из начального
звена 2,
обладающего
одной степенью свободы,
стойки 1
и звеньев,
образующих кинематическую цепь,
состоящую из звеньев 3,
4, 5 и 6.
Процесс
образования
этого механизма можно представить
как последовательное присоединение
к начальному звену 2
и к стойке
1 кинематической
цепи, состоящей из звеньев З
и 4.
Тогда
получим четырехзвенный механизм АВCD,
обладающий
одной степенью
свободы. Далее к
звену 4
механизма
AВСD
и стойке 1
присоединим
кинематическую цепь, состоящую из
звена 5 и
ползуна 6.
Тогда
получим шестизвенный механизм,
обладающий также одной степенью
свободы.
Нетрудно
теперь установить определенную
закономерность процесса образования
механизма. В самом деле, любой механизм
имеет одно неподвижное звено (стойку).
У механизма,
показанного на рис. З.1, стойкой будет
звено 1.
далее,
механизм должен иметь число начальных
звеньев, равное числу его степеней
свободы. В
нашем случае механизм (рис. 3.1) обладает
одним начальным звеном 2,
так как
степень свободы механизма согласно
(3.1) равна W=1
Так как после присоединения звеньев
3, 4, 5 и
б число степеней свободы всего механизма
осталось равным W=1,
то, следовательно, кинематическая
цепь, состоящая из звеньев 3,
4, 5 и 6,
присоединенных к начальному звену 2
и стойке
1, обладает
нулевой степенью свободы относительно
тех звеньев, к которым эта цепь
присоединяется. При последовательном
присоединении групп
необходимо
руководствоваться определенными
правилами. При образовании механизма
с одной степенью свободы первая группа
присоединяется свободными элементами
звеньев к начальному звену и к стойке.
Последующие группы могут присоединиться
к любым звеньям
полученного механизма только так,
чтобы звенья группы обладали
подвижностью
друг относительно
друга. Пусть,
например,мы
имеем
четырехзвенный механизм
АВСD
(рис. 3.2),
образованный
начальным
звеном 2,
стойкой 1
и группой,
состоящей из
звеньев 3 и
4. Следующая
группа, состоящая из звеньев 5
и 6,
может быть
присоединена
к любым двум разным звеньям механизма,
например к звеньям 3
и 4
(рис. 3.2), но
не к одному и тому же звену. Так,
например, если присоединить звенья 5
и 6
к одному и
тому же звену 3
(рис. 3.2). то
контур FEG’,
образованный
звеньями 3,
5 и 6, будет
жестким, т. е. будет фермой.Нетрудно
видеть, что
для того,
чтобы после
присоединения группы ее звенья имели
подвижность относительно тех звеньев,
к которым группа присоединена,
необходимо, чтобы замкнутый контур,
образованный звеньями группы и
звеньями, к которым она присоединится,
был подвижным контуром. Так, на
рис. 3.2 контур
GСFЕ
будет
обладать
подвижностью. Нетрудно видеть, что
для того, чтобы
такой контур
обладал подвижностью, необходимо,
чтобы звенья контура входили бы не
менее чем
в четыре
кинематические
пары (пары F,
Е,G
и С на рис.
3.2).