

Исходные данные
|
Вариант |
|
OA, м |
e, м |
AC, м |
|
\EMBED
Equation
|
|
|
|
0 |
0.50 |
0.35 |
0.05 |
0.45 |
110° |
500 |
9.00 |
0.30 |
|
1 |
0.50 |
0.40 |
0.06 |
0.50 |
115° |
450 |
10.00 |
0.25 |
|
2 |
0.50 |
0.45 |
0.07 |
0.35 |
120° |
400 |
11.00 |
0.15 |
|
3 |
0.40 |
0.50 |
0.08 |
0.40 |
125° |
500 |
12.00 |
0.25 |
|
4 |
0.40 |
0.35 |
0.05 |
0.35 |
110° |
400 |
13.00 |
0.40 |
|
5 |
0.40 |
0.40 |
0.06 |
0.45 |
115° |
500 |
13.00 |
0.30 |
|
6 |
0.40 |
0.35 |
0.07 |
0.50 |
120° |
550 |
12.00 |
0.25 |
|
7 |
0.50 |
0.40 |
0.08 |
0.35 |
125° |
400 |
11.00 |
0.15 |
|
8 |
0.50 |
0.45 |
0.05 |
0.40 |
110° |
400 |
10.00 |
0.25 |
|
9 |
0.50 |
0.50 |
0.06 |
0.35 |
115° |
450 |
9.00 |
0.40 |
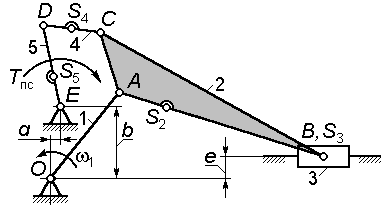
Кинематическая схема № 22
![]()
 -
время рабочего цикла механизма;
-
время рабочего цикла механизма;
![]() - момент полезного (производственного)
сопротивления.
- момент полезного (производственного)
сопротивления.
Соотношения для масс и моментов инерции звеньев
|
|
|
|
|
|
|
|
Примечание: при подборе длин звеньев учесть соотношения
|
|
|
|
|
|
|
|
|
Подбором
размеров a
и b
обеспечить возможность полного оборота
звена 5; размеры CD
и DE подобрать
так, чтобы угол передачи
![]() имел наименьшие возможные отклонения
от 90°.
имел наименьшие возможные отклонения
от 90°.
Исходные данные
|
Вариант |
|
OA, м |
e, м |
AC, м |
|
|
|
|
|
0 |
0.50 |
0.35 |
0.05 |
0.45 |
110° |
500 |
9.00 |
0.65 |
|
1 |
0.50 |
0.40 |
0.06 |
0.50 |
115° |
450 |
10.00 |
0.55 |
|
2 |
0.50 |
0.45 |
0.07 |
0.35 |
120° |
400 |
11.00 |
0.45 |
|
3 |
0.40 |
0.50 |
0.08 |
0.40 |
125° |
500 |
12.00 |
0.55 |
|
4 |
0.40 |
0.35 |
0.05 |
0.35 |
110° |
400 |
13.00 |
0.60 |
|
5 |
0.40 |
0.40 |
0.06 |
0.45 |
115° |
500 |
13.00 |
0.50 |
|
6 |
0.40 |
0.35 |
0.07 |
0.50 |
120° |
550 |
12.00 |
0.45 |
|
7 |
0.50 |
0.40 |
0.08 |
0.35 |
125° |
400 |
11.00 |
0.35 |
|
8 |
0.50 |
0.45 |
0.05 |
0.40 |
110° |
400 |
10.00 |
0.55 |
|
9 |
0.50 |
0.50 |
0.06 |
0.35 |
115° |
450 |
9.00 |
0.60 |
Кинематическая схема № 23

![]() -
время рабочего цикла механизма;
-
время рабочего цикла механизма;
![]() - сила полезного (производственного)
со-противления (действует только во
время рабо-чего хода ползуна 5).
- сила полезного (производственного)
со-противления (действует только во
время рабо-чего хода ползуна 5).