

Артоболевский И.И. Элементы механизмов. Простейшие рычажные и шарнирно-рычажные механизмы [том 1]
.pdf110ПЯТИПОДВИЖНОЕ СОЕДИНЕНИЕ
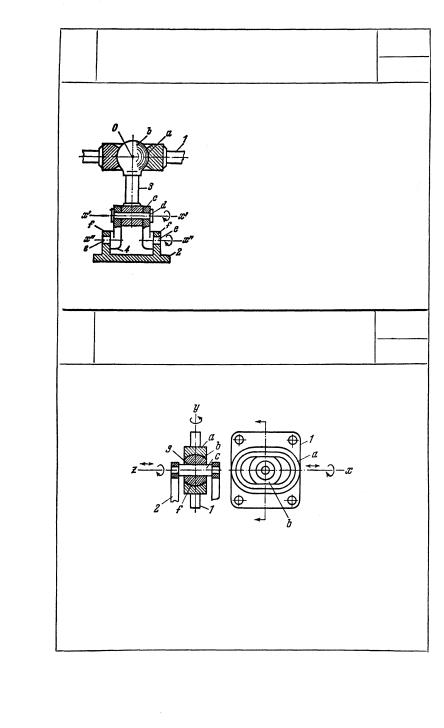
СБОЧКООБРАЗНОЙ ГОЛОВКОЙ
Звено 1 имеет втулку a, охватывающую валик b звена 3. Звено 3 имеет пальцы с, входящие в проушины d звена 4. Звено 4 имеет бочкообразную головку е, входящую в шаровой пояс f звена 2.
Движение звена 1 относительно звена 2 сводится к пяти вращательным движе-
ниям вокруг трех взаимно перпендикулярных осей, пересекающихся в точ-
ке О, и вокруг двух параллельных осей х' — х' и х" — х".
ЭМ
ПС
111 |
ПЯТИПОДВИЖНОЕ СОЕДИНЕНИЕ |
ЭМ |
|
|
|||
С ОВАЛООБРАЗНЫМИ НАПРАВЛЯЮЩИМИ |
ПС |
||
|
|||
|
|
Звено 1 имеет овалообразные направляющие а, в которых скользят и вращаются круглые пальцы b
звена 3. Звено 3 имеет призматическую направляющую с, по которой
скользит ползун d звена 4. Звено 4 имеет цилиндрические направляющие е, охватываемые проушинами f звена 2. Движение звена 1 относительно звена 2 сводится к двум вращательным движениям вокруг взаимно перпендикулярных осей х — хиу — у и трем поступательным движениям вдоль взаимно перпендикулярных осей х — х, у — у
и z — z.
71
112 |
ПЯТИПОДВИЖНОЕ СОЕДИНЕНИЕ |
ЭМ |
|
||
С ШАРОВОЙ ГОЛОВКОЙ |
|
|
|
ПС |
|
|
|
Звено 1 имеет шаровой пояс a, охватывающий шаровую головку b звена 3. Звено 3 имеет втулку с, охватывающую валик d звена 4. Звено 4 имеет пальцы е, входящие в проушины f звена 2. Движение звена 1 относительно звена 2 сводится к пяти вращательным движениям вокруг трех осей, пересекающихся в точке О, и вокруг параллель-
ных осей х' — х' и х" — х".
113 |
ПЯТИПОДВИЖНОЕ СОЕДИНЕНИЕ |
эм |
|
||
С ОВАЛООБРАЗНОЙ НАПРАВЛЯЮЩЕЙ |
|
|
|
ПС |
|
|
|
Звено 1 имеет овалообразную направляющую а, шаровой пояс 1 которой охватывает бочкообразную головку b звена 3. Звено 3 имеет проточку, в которую входит цилиндрическая направляющая с звена 2. Движение звена 1 относительно звена 2 сводится к трем вращательным движениям вокруг взаимно перпендику-
лярных осей х — х, у — у и z — z и двум поступательным движениям вдоль осей х — х и z — z.
72

II
ПРОСТЕЙШИЕ
РЫЧАЖНЫЕ
МЕХАНИЗМЫ
ПР
1. Механизмы рычагов Р (114—152). 2. Механизмы захватов, зажимов и распоров 33 (153—234). 3. Механизмы весов В (235—239). 4. Механизмы тормозов Тм (240—245). 5. Механизмы остановов, стопоров и запоров 03 (246—318). 6. Механизмы переключения, включения и выключения ПВ (319— 341). 7. Механизмы фиксаторов Ф (342—381). 8. Механизмы сортировки, подачи и питания СП (382—404). 9. Механизмы регуляторов Рг (405— 415). 10. Механизмы муфт и соединений МС (416— 434). 11. Механизмы измерительных и испытательных устройств И (435—452). 12. Механизмы молотов, прессов и штампов МП (453—457). 13. Механизмы клавиш К (458—461). 14. Механизмы грузоподъемных устройств Гп (462—466). 15. Механизмы
предохранителей |
Пд (467—468), |
16. Механизмы |
с регулируемыми |
звеньями РЗ |
(469—475). 17. Ме- |
ханизмы для математических операций МО (476— 479). 18. Механизмы соприкасающихся рычагов СР
(480—493). 19. Механизмы прочих целевых устройств цу (494—508).


1. МЕХАНИЗМЫ РЫЧАГОВ (114—152)
ПР
114 |
ОДНОПЛЕЧИЙ РЫЧАГ |
115 |
ПР |
ДВУПЛЕЧИЙ РЫЧАГ |
ПР
116 ТРЕХПЛЕЧИЙ УГЛОВОЙ РЫЧАГ
Р
Рычаг 1 вращается вокруг неподвижной оси А. Поворот рычага 1 происходит за счет усилия, приложенного к любому из его концов.
75

ПР
117 |
ГРУЗОВОЙ РЫЧАГ |
|
Р |
|
Рычаги 1 и 2 свободно вра- |
|
щаются вокруг неподвижной |
|
оси А. При перемещении из |
|
одного предельного положе- |
|
ния в другое рычаг 1, воз- |
|
действуя на пальцы а или b |
|
рычага 2, доводит его до упо- |
|
ров d или с. |
118 |
ПР |
РЫЧАГ С ПЕРЕМЕЩАЮЩИМСЯ ГРУЗОМ |
Звено 2 вращается вокруг неподвижной оси А. Груз G может свободно перемещаться вдоль штанги а звена 2, которое входит во вращательную пару В с ведущим звеном 3. Фиксация звена 2 произ-
водится перемещением груза G с одной стороны штанги на другую: при этом звено 2 ложится то на одну, то на другую опору стойки 1.
ПР
119 |
СПАРЕННЫЙ ДВОЙНОЙ РЫЧАГ |
Р
Рычаг 2 вращается вокруг оси х — х. Поворот двойного рычага 2 происходит за счет усилия, приложенного к ручке 1.
76

120 |
РЫЧАГ С ПРУЖИНОЙ ДЛЯ УСТАНОВКИ |
ПР |
|
||
ЕГО В ДВУХ ПОЛОЖЕНИЯХ |
|
|
|
Р |
|
|
|
Рычаг 1 вращается вокруг неподвижной оси A и удерживается в крайних положениях пружиной, воздействующей на ползун 2. При повороте рычага 1 в положение, показанное на чертеже штриховой линией, соприкосновение рычага 1 с ползуном 2 происходит по плоскости а — а. Цилиндр 3 неподви-
жен.
ПР
121 РЫЧАГ С ЗАТЯГИВАЮЩИМ БОЛТОМ
Р
Вращающийся вокруг оси А шестигранника 3 рычаг 1 может быть закреплен болтом 2 в положении, указанном на чертеже. Ось А расположена эксцентрично, что позволяет уменьшить пе-
рекос рычага при закреплении различных по высоте h предметов
постановкой шестигранника на ту из граней, при которой перекос будет минимальным.
77

ПР
122 ФИКСИРУЕМЫЙ УГЛОВОЙ РЫЧАГ
Р
Двуплечий рычаг 2 вращается вокруг неподвижной оси А и может занимать два положения, показанных на чертеже. В каждом из этих положений он жестко фиксируется ползуном 1, скользящим в неподвижных направляющих. Перемещение ползуна 1 осуществляется винтом 3. Возможность самоотвинчивания винта 3
устраняется контргайкой 4.
123 |
ДВУПЛЕЧИЙ РЫЧАГ, |
ПР |
|
||
ВРАЩАЮЩИЙСЯ С ОСТАНОВКАМИ |
|
|
|
|
Находящийся под воздействием постоянного крутящего момента вал 1, вращающийся вокруг оси х — x, связан с двуплечим рычагом 2. При возвратно-поступательном перемещении собачки 3 в направлении, указанном стрелками, вал 1 поворачивается на пол-оборота. Время срабатывания собачки 3 должно быть не-
сколько меньшим времени поворота вала 1 на пол-оборота.
78

ПР
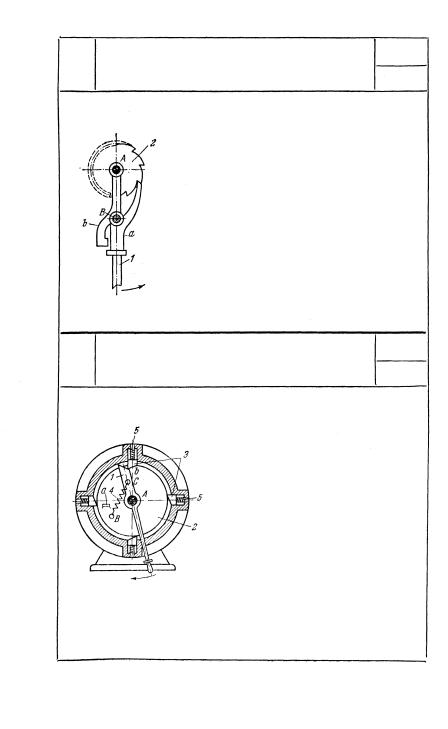
124 РЫЧАГ С ЧЕРВЯЧНЫМ ПРИВОДОМ
Р
Вращение рычага 3 вокруг неподвижной оси В осуществляется вращением червяка 1 вокруг оси х — х. Защелка 2 при этом находится в зацеплении с червяком под действием плоской пружины 4. При нажатии на рукоятку а защелки 2 она выходит из зацепления с червяком, и рычаг 3 может поворачиваться свободно вокруг оси В. Для свободного выхода защелки 2 из зацепления с червяком она связана с рычагом 3 промежуточным звеном 5,
свободно вращающимся вокруг оси А.
ПР
125 РЫЧАГ С НЕПОДВИЖНЫМ КУЛАЧКОМ
Рычаг 1 вращается вокруг неподвижной оси А. Звено 2 вхо-
дит во |
вращательную |
пару В |
с рычагом 1 и своей прямоли- |
||
нейной |
кромкой а — а |
касается |
профиля |
b — b неподвижного |
|
кулачка 3. При вращении рычага 1 в направлении, указанном стрелкой, точка С звена 2 переходит в положение С'. В зависимости от выбранного профиля b — b кулачка 3 могут быть
получены различные траектории СС' точки С. Пружина 4 осуществляет силовое замыкание механизма.
79
ПР
126 РЫЧАГ С ХРАПОВЫМ КОЛЕСОМ
Р
Двусторонний рычаг 1, состоящий из звеньев а и b, входящих в шарнир B, и храповое колесо 2 вращаются вокруг неподвижной оси А. При повороте рычага а в направлении стрелки поворачивается и храповое колесо 2, а при обратном повороте рычаг а выходит из зацепления с колесом 2 и возвращается
в исходное положение.
ПР
127 РЫЧАГ С ХРАПОВЫМ КОЛЕСОМ
Р
Рычаг 1 вращается вокруг неподвижной оси A. Храповое колесо 2 вращается независимо от рычага 1 вокруг оси А. Собачки 3 под действием пружин 5 входят последовательно в зацепление с колесом 2, заклиниваясь в вырезе b колеса 2. Пружина 4 одним концом закреплена в точке В колеса 2, а вторым концом — в точке С рычага 1. При вращении в направлении, указанном стрелкой, рычаг 1 своим скошенным краем выводит собачку 3 из за-
цепления с колесом 2, которое, посредством пружины 4 переводится в следующее положение. Выступ а служит ограничителем движения храпового колеса 2.
80