

§4. Вращательное движение. Угловая скорость. Угловое
ускорение. Период, частота. Связь между линейными
и угловыми характеристиками.
Движение точки по дуге окружности радиуса R называется вра-
щательным движением рис (4.1). Линия перпендикулярная плоскости
вращения (плоскости в которой лежит траектория) и проходящая через
центр окружности (точка О) называется осью вращения. Изменение по-
ложения точки при вращательном движении характеризуют углом пово-
рота Dj радиуса кривизны траектории (измеряют в радианах).


Направление
поступатель-
ного
движения
Рис.4.1
17
Угол поворота удобно представить в виде вектора Dj : вектор
Dj численно равен углу поворота Dj и направлен вдоль оси вращения
согласно правилу правого винта. При вращении правого винта (буравчи-
ка) по направлению вращения, направление поступательного движения
буравчика “показывает” направление вектора Dj
Угловая скорость вращения равна первой производной от угла
поворота :
r
dj
dj

dt dt
Вектор w направлен так же, как и вектор dj (т.е. Dj при Dt®0)
(уравнение (4.1), рис. 4.1). Вращение с постоянной угловой скоростью
называется равномерным. В этом случае:
ω = , (4.2)
где j - угол поворота за время t.
Равномерное вращательное движение характеризуют периодом
вращения Т - это время одного оборота (т.е. время поворота радиуса вра-
щения на угол 2p). Из (4.2) получим для равномерного вращательного
движения
(взяв
t
=
T
и,
соответственно,
j
=
2p
)

ω = (4.3)
Число оборотов в единицу времени n равно:
. (4.4)
(Понятие периода Т и числа оборотов n можно использовать и для нерав-
номерного вращательного движения, принимая за эти величины те значе-
ния, которые имела бы точка, если бы она вращалась равномерно с дан-
ным значением мгновенной скорости). Из (4.1) , (4.2) и определений Т и n
следует:
[w]=рад/с=1/с=с-1
[T]=c; [n]=обороты/с=1/с=с-1
Вектор w может меняться как вследствие изменения скорости
вращения вокруг оси (т.е. изменяется величина w), так и вследствие пово-
рота
оси
вращения
(т.е.
меняется
направление
вектора
w
).
Пусть
за
время

Dt вектор w изменился на Dw . Угловое ускорение b равно:
18
r
r
r



(4.5)

dt2
Угловое ускорение есть первая производная от угловой скорости или
вторая производная от угла поворота по времени Если ось вращения не
меняет своего направления, то изменения w зависит только от изменения
его величины Следовательно, для неизменного направления оси вращения
из (4.5) получим:
dω
d
j

dt dt2
В этом случае, при увеличении величины w вектор Dw совпадает с век-
тором w (рис 4.2), при уменьшении – противоположен (рис. 4.3).
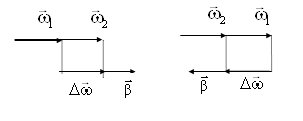

Рис.4.2 Рис.4.3
r
Из сказанного и уравнения (4.5) следует: направление вектора b совпа-
дает с направлением вектора w при ускоренном вращении, и противопо-
ложно
направлению
w
при
замедленном.




ds







Найдем связь линейных характеристик
движения (u, a, an , at ) с угловыми
(w,
b).
Из
рис.4.4
видно:


dS dj
d S = dj×R ⇒ dt = dt R ⇒
u=wR . (4.7)
(Учитывая правило векторного произведения можно записать (рис.4.4а):

r
r
r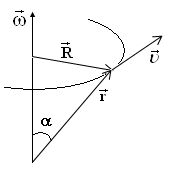
тор u перпендикулярен w и r т.е. пер-
пендикулярен R ).
Т.к. an = ⇒ то, учитывая (4.7), полу-
2
чим:
an
=
=
⇒

Рис.4.4а
an=
w
R
.
(4.8)

Если ось вращения не меняет своего положения в пространстве, то (с уче-
том
(4.7)):

Если
при
этом
R
=
const
,
то
получим
:
b
=
×
⇒
b
=
⇒

aτ
=
β
×
R
Из (3.8) , (4.8) и (4.9) находим:
a = (ω2 × R)2 + (β × R)2 = R ω4 + β2
Пример: равноускоренное вращательное движение по окружности радиу-
са R: b=const⇒ at=bR=const

Из (4.6): dω = β × dt ⇒ dω = β × dt ⇒
ω0 0
w-w0=bt
w=w0+
bt;
(см.
3.10).
(4.10)

j

dj
=
ω
×
dt
⇒
=
+
β
×
t)dt
⇒
j0 0


j
-j0
=
ω0t
+
(см. 3.11 и 3.12).
∆j = ω0t +
20
Т.к.

S = ∆j × R ⇒ = ω0t + ⇒ S = ω0Rt + ,
wR=u0, bR= at ⇒
aτ ×t2
S = u0t + (см. 3.11 и 3.12). (4.12)
2
21