

§3.Ускорение. Нормальное и тангенциальное
ускорение.
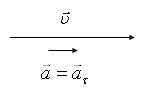
Скорость при движении тел может меняться как по величине, так
и
по
направлению
(рис.
3.1):

Du =u2 -u1 изменение скорости за время Dt .
Определение
ускорения:



a = = = υ
r
dr
r
du
d
r
r

dt dt dt2
Ускорение
равно
первой
производ-
ной от скорости или второй производной от
радиус - вектора по времени.
Ускорение характеризует быстроту
изменения
вектора
скорости.
Оно
направлено


так же как Du при ∆t®0. Из рис. 3.1 видно,
что вектор направлен в сторону “закруг-
ления” траектории. Подставим в (3.1) вектор
u , выражен через его проекции (уравнение
(2.5))

Рис.3.1
r
d
r
r
dvx
r
dt dt dt
Выразим
вектор
a
через
проекции
ax
,
ay

a = axex + ayey . (3.4)
Из (3.3) и (3.4) находим:
2


ax = , т.к. & &&
dt dt dt dt2
2
аналогично для ay : & &&
2
Из
(3.2)
получим:
.

с2
13
Малый
участок
криволинейной
траекто-
рии всегда можно представить как дугу окружно-
сти радиуса R (рис. 3.2). Этот радиус называется
радиусом кривизны траектории для данной точки
кривой. Центр окружности (точка О) называется
центром кривизны траектории. Из сказанного
выше следует, что вектор a всегда направлен в
сторону центра кривизны. Разложим вектор a на
две составляющие: одна из них an направлена по
радиусу
кривизны,
вторая
at
-
по
касательной


(т.е. по линии перпендикулярной к радиусу кри-
a
=
an
+
at

Составляющая an называется нормальным (или центростремительным)
ускорением и характеризует быстроту изменения направления вектора
скорости.


(3.6)

Составляющая at называется тангенциальным (или касательным)
ускорением и характеризует быстроту изменения вектора скорости по
величине. Следовательно, модуль вектора at должен быть равен:


(3.7)
Так
как
an
перпендикулярна
at
,
то:


a
=
a
+
at2

Примеры.
1. Прямолинейное движение: радиус
кривизны R® ¥ (направление скорости не ме-
няется). Из (3.6) получим:

an = 0 ⇒ a = aτ
14
2.
Криволинейное
движение
с
постоянной



по
величине
скоростью
u
=
const
:










aτ = = 0 ⇒ a = an
3. Равнопеременное движение: a = const => .
Из (3.4) получим (после интегрирования левой и правой части)


dux = axdt ; = dt ⇒ux -u0x = axt ⇒
u0x 0
ux = u0 x + axt
Из(2.6) следует :
x
t2
t
∫dx=∫u
dt
⇒
x-
x0
=∫(u
+axt)dt
⇒
x
=
x0
+uox×t
+
2
(3.11)




(3.12)
Например: тело брошено под углом a к
горизонту вверх со скоростью u0 с высо-
ты h ( рис.3.3).
x0=0; y0=h; ax=0; ay=-g
u0x =u0 cosa ;uoy =u0 cos(90 -a) =u0 sina

x
=
u0
cosa
×
t;
y
=
h
+u0
sina
×
t
-

Рис.3.3
§3А. Вывод формул для тангенциального и нормального ускорений.

На рис.3.а.1 показаны вектора t и скорости для двух положений точек на
криволинейной траектории. Подставим (3.1а) в (3.1).
15

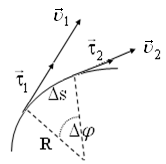




Рис.3а.1 Рис.3а.2
Направим единичный векторt по направлению скорости . Тогда
u = t (3.1а)
(3.2а)
Первое
слагаемое
в
(3.2а)
есть
вектор
at
:

at
=
t

Следовательно, at направлен так же как вектор t , т.е. по направлению вектора , т.е.
по касательной. Т.к. вектор t - единичный, то
du
dt
Второе
слагаемое
в
(3.2а)
есть
нормальное
ускорение:

an = u . (3.3а)
dt

Найдем производную от единичного вектора t ( рис. 3.а.2).
dτ ∆τ τ2 - τ1 . (3.4а)
По определению :
∆ t ® ∆ t ®
Направим единичный вектор n1 так же как вектор Dt . Тогда:
∆τ = ∆τ × n1 , (3.5а)
где Dt - длина вектора Dt . Учитывая, что ∆t®0, т.е. Dj - мал, длину Dt можно
найти как длину дуги окружности с радиусом t1=t2=t=1 и центральным углом Dj
(рис 3.a2):
16
∆t=t∆j=∆j
(t=1).
(3.6а)



Подставим (3.5а) и (3.6а) в (3.4а) :
При ∆t®0 направление вектора n1 стремиться к направлению, совпадающему с направ-
лением
радиуса
кривизны
R
:



при Dt®0
Из рис. 3a.1 и 3a.2 видно
Подставим
Dj
в
(3.7а)
:




lim0 × × n = n ∆t ® = n . (3.8а).
∆t ®
an
=
u
×
n
=
n
Т.е.
вектор
an
направлен
по
радиусу
кривизны
и
равен
по
модулю
u
2
R
.
