

4.6. Понятие о демпфировании электроприводом упругих механических колебаний
Представляя электропривод простейшей структурной схемой на рис. 4.7, необходимо помнить, что неучет упругих механических связей всегда в той или иной степени искажает фактический характер процессов. Наряду с задачами, для решения которых в конкретных условиях эти искажения не имеют существенного значения, имеется широкий круг практических вопросов, правильно решить которые без учета упругостей невозможно. Кроме того, при решении любых задач нужно уметь оценивать влияние упругих связей на динамику электромеханической системы. Поэтому анализ особенностей взаимодействия электропривода, обладающего линейной механической характеристикой, с механизмом, содержащим упругие связи, в единой системе имеет важное практическое значение.
Проведем анализ влияния упругих связей с помощью обобщенной структуры электромеханической системы, представленной на рис. 4.5. Для удобства анализа процессов по управлению положим ΜC1=МС2=0 и воспользуемся преобразованной структурной схемой механической части, приведенной на рис. 1.12,б. Полученная таким образом структурная схема электропривода с упругой связью приведена на рис. 4.14. Здесь передаточные функции механической части выражены через обобщенные параметры γ, Ω12 и ΤM1=J1/β,причем γTΜ1β=JΣ. (см. § 1.5).
Обращаясь к анализу свойств механической части, выполненному в § 1.5, можно заключить, что в структуре на рис. 4.14 механическая часть объекта представляет собой консервативное колебательное звено, в котором при Μ=const возникшие механические колебания при принятых допущениях не затухают. Однако, рассматривая схему на рис. 4.14, можно установить, что колебания скорости двигателя οηблагодаря наличию внутренней обратной связи по скорости в системе электропривода должны вызывать колебания момента, обусловленные динамической жесткостью механической характеристики:
![]() (4.30)
(4.30)
При отсутствии электромагнитной инерции (ТЭ=0)
![]()
Сравнивая эту зависимость с (1.18), можно убедиться, что при отсутствии электромагнитной инерции двигатель создает воздействующий на первую массу момент, аналогичный моменту вязкого трения. Следовательно, электропривод благодаря наличию электромеханической связи оказывает на колебания в механической части демпфирующее действие, аналогичное действию вязкого трения. Степень затухания колебаний в консервативной механической системе является количественным показателем демпфирующей способности электропривода.
Рассмотрим эффект демпфирования упругих колебаний на простейшем примере, предположив, что момент инерции второй массы настолько велик, что она практически не совершает колебаний (J2>>J1),а электромагнитная инерция настолько мала, что можно принять ТЭ=0. Этим условиям соответствуют
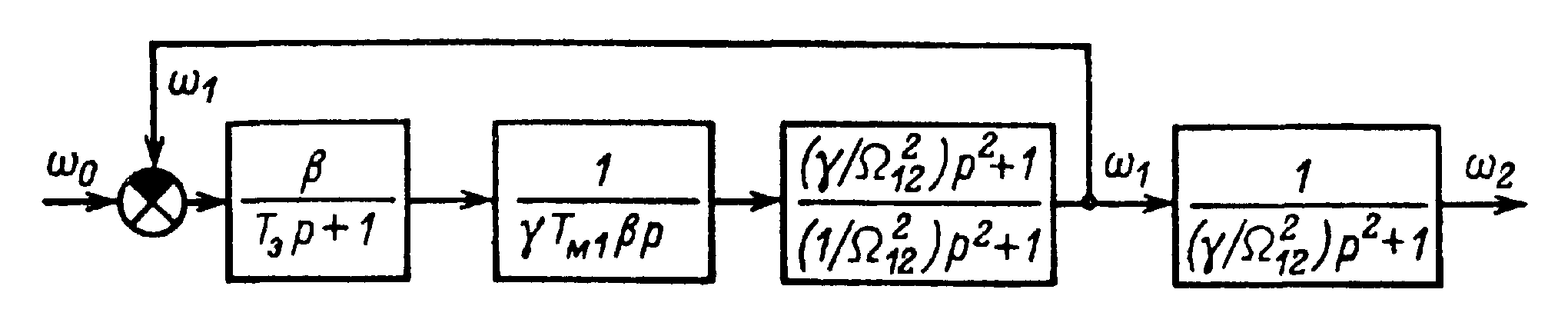
Рис.4.14. Преобразованная структурная схема двухмассовой упругой системы
электромеханическая схема на рис. 4.15, а и структурная схема, изображенная на рис. 4.15, б. Путем преобразования этой структуры получим передаточную функцию объекта по управляющему воздействию ω0:
 (4.31)
(4.31)
Характеристическое уравнение системы
![]()
Корни данного уравнения
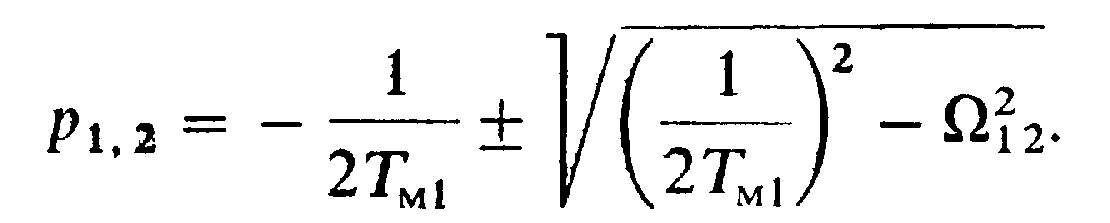
Если Ω12 >½ТМ1корни являются комплексно-сопряженными:
 (4.32)
(4.32)
Нетрудно видеть, что при ΤM1≠∞колебания в рассматриваемой упругой электромеханической системе затухают вследствие демпфирующего действия электропривода. Рассмотрим влияние параметров электропривода на затухание колебаний характеризуемое логарифмическим декрементом
![]() (4.33)
(4.33)
Пусть якорь двигателя питается от источника тока Iя=I1=const, тогда при Φ=Фном=const Μ=c·I1=Μ1=const. Механическая характеристика двигателя, соответствующая этому режиму, приведена на рис. 4.16,а(прямая1).Ей соответствуют β=0 и ТМ1=∞, при этом по (4.33) λ=0. Следовательно, при β=0 демпфирующее действие электропривода на механические колебания отсутствует.
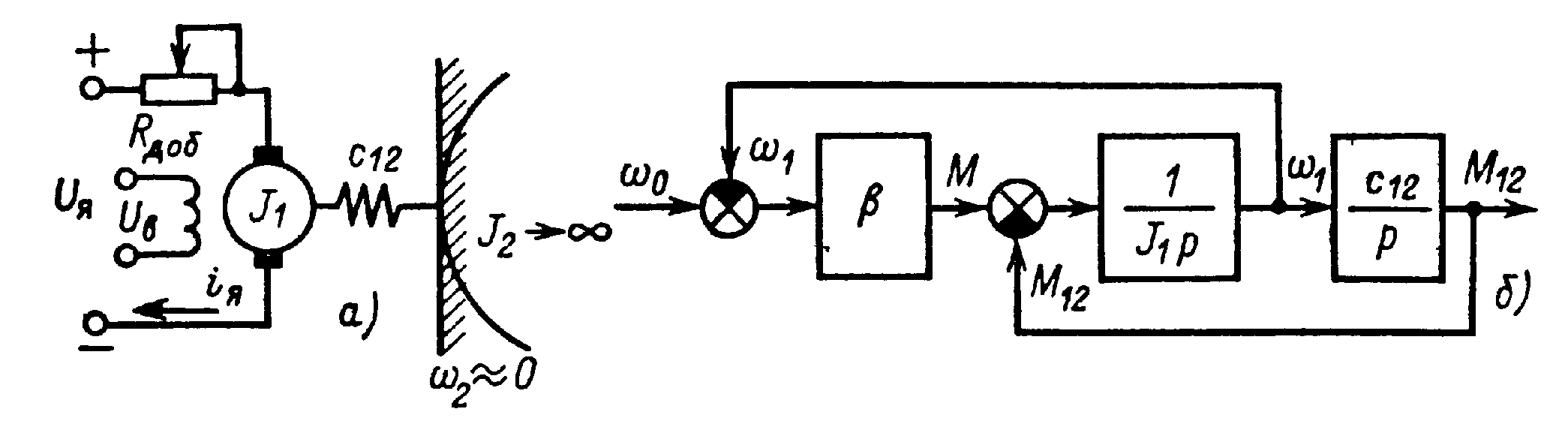
Рис. 4.15. К анализу демпфирующего действия электропривода при J2=∞и Тэ=0
Подключив якорь к источнику регулируемого напряжения uя, можно при различных uя вводить добавочные резисторы Rдоб с такими сопротивлениями, при которых Iк,з = I1 = const, и получить семейство механических характеристик 2–7, показанных на рис. 4.16,a, Этим характеристикам соответствуют значения
=c2/(Rя+Rдоб),
изменяющиеся в пределах от 0 до е. При увеличении от 0 до е значения Тм1, изменяются от до Tм1е, и в соответствии с (4.33) затухание колебаний постепенно увеличивается. При =кр, когда 2Тм1кр12=1, в соответствии с (4.33) = и переходный процесс в системе приобретает апериодический характер. Таким образом, зависимость =() имеет вид, показанный на рис. 4.16,6 (кривая 1). Рассматривая эту кривую, можно убедиться, что изменение жесткости механической характеристики является эффективным средством изменения колебательности системы. Каждому значению J1 и c12 соответствует определенное значение кр, обеспечивающее критическое демпфирование (=):
![]()
При J2 дальнейшее увеличение кр в области >кр в соответствии с (4.32) вызывает монотонное возрастание коэффициента затухания , так как вторая масса колебаний совершать не может. При конечных значениях J2 и вторая масса вовлекается в процесс колебаний, причем в случае жесткой заделки первой массы возникшие колебания не затухают. Следовательно, если принять, что и Тм1 0, то в двухмассовой системе демпфирование должно уменьшаться
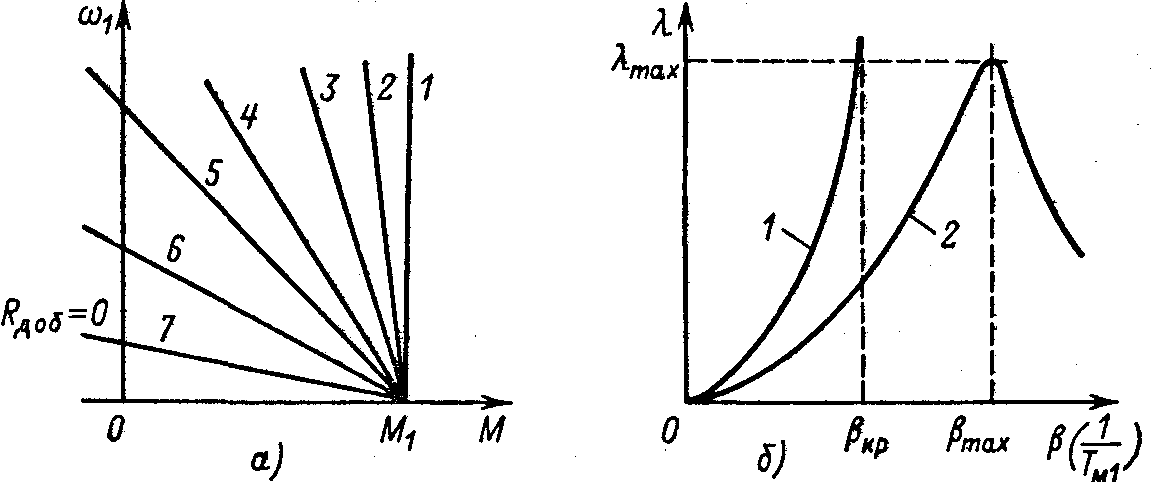
Рис. 4.16. Механические характеристики (а) и соответствующие характеристики демпфирования (б)
При Тм1* = 0 ( = ) уравнение (4.37) также упрощается:
![]()
Корни
этого уравнения
![]() Переходя к действительному времениt,
получаем
Переходя к действительному времениt,
получаем
![]() (4.38)
(4.38)
где
![]() – частота свободных колебаний массыJ2
при жесткой заделке вала двигателя. В
этом случае отсутствуют колебания массы
двигателя J1
и демпфирующая способность электропривода
оказывается равной нулю по причине
чрезмерно сильной электромеханической
связи.
– частота свободных колебаний массыJ2
при жесткой заделке вала двигателя. В
этом случае отсутствуют колебания массы
двигателя J1
и демпфирующая способность электропривода
оказывается равной нулю по причине
чрезмерно сильной электромеханической
связи.
Таким образом, как при предельно слабой электромеханической связи ( = 0), так и при предельно сильной (жесткой) электромеханической связи ( = ) демпфирующий эффект отсутствует и логарифмический декремент (4.36) равен нулю. При увеличении от нуля Тм1*= Тм112 уменьшается, логарифмический декремент возрастает до максимума и при дальнейшем увеличении вновь стремится к нулю, как это и показано на рис. 4.16,6 (кривая 2), где значению max соответствует оптимальное значение (Тм1*)max.
Из изложенного следует, что каждому значению соответствует один максимум max, который наступает при определенном значении (Тм1*)max. Таким образом, max в системе без электромагнитной инерций зависит только от соотношения инерционных масс =J/J1. Оптимальная жесткость механической характеристики зависит от параметров механической части:
max=J112/(Тм1*)max (4.39)
Формула (4.39) свидетельствует о том, что чем больше частота свободных механических колебаний системы, тем при большей жесткости max достигается максимум логарифмического декремента max.
Современная вычислительная техника позволяет детально исследовать связь демпфирующей способности электропривода с обобщенными параметрами электромеханической системы. Задаваясь различными и Tэ*, можно вычислить соответствующие (4.35) значения , построить семейства зависимостей =(Тм1*) при =const и Tэ*=const, аналогичные кривой 2 на рис. 4.16, б, и далее установить, как изменяются значения max, в зависимости от Tэ* и .
Полученные в результате расчетов на цифровой ЭВМ обобщенные зависимости max=(Тэ*) и (Тм1*)max=(Тэ*) при =const представлены на рис. 4.18. Рассматривая их, можно выявить ряд важных физических особенностей упругой электромеханической системы.
Возможное демпфирование колебании в соответствии с рис. 4.18 тем выше, чем больше , т. е. чем больше приведенный момент инерции механизма. При малых (см. кривую для =1,5) в широком диапазоне значений Тэ* max < 2. При этом выбором параметров электромеханического преобразователя невозможно обеспечить высокодемпфированные процессы в упругой системе.
Кривая, соответствующая = 1,5 свидетельствует о том, что электромагнитная инерция в определенных пределах позволяет увеличить демпфирование (пред = 2,2) и соответствует значительным Тэ*, в то время как при Тэ* = 0, max = 0,85, т. е. ниже в 2,6 раза.
Так как индуктивность диссипативными свойствами не обладает, возможность ее демпфирующего действия требует разъяснений. При малых и m < 4 система имеет две пары комплексных корней и две резонансные частоты, из которых первая пара и первая частота характеризуют колебательность двигателя, а вторая резонансная частота близка к частоте свободных механических колебаний. При увеличении индуктивности рассеяния колебательность двигателя, зависящая от m = Тм1 / Тэ, увеличивается и меньший резонансный пик АЧХ возрастает. Однако увеличение колебательности двигателя при малом моменте инерции J2 увеличивает электромеханическую связь и отвод энергии механических колебаний в цепь якоря; второй резонансный пик, обусловленный параметрами механической части, соответственно уменьшается.
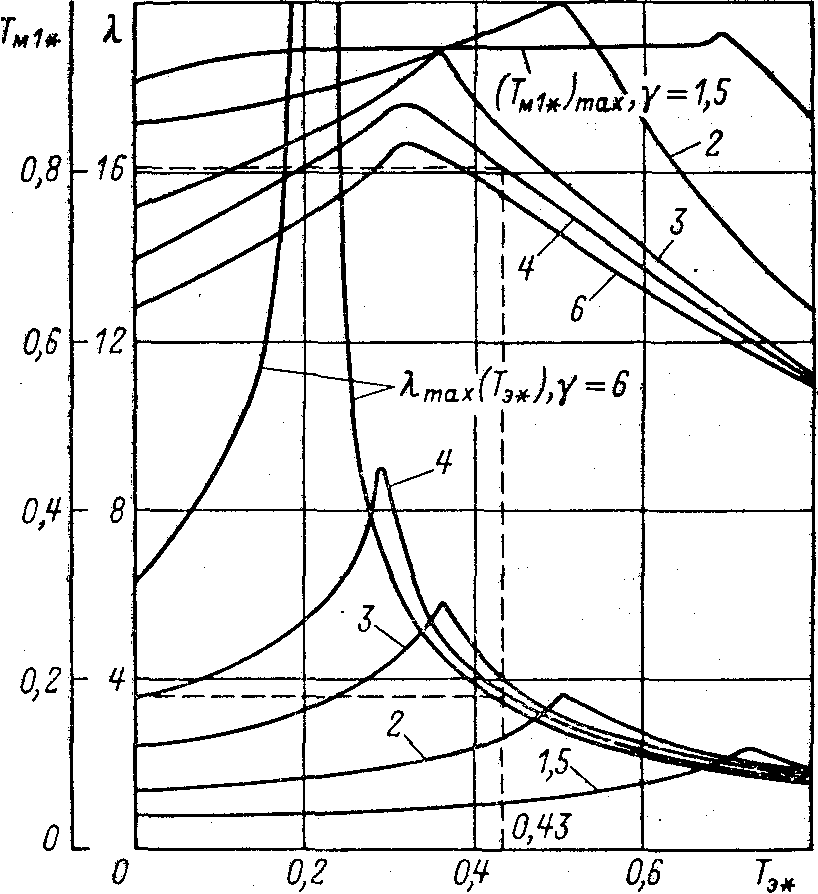
Рис. 4.18. Характеристики максимального демпфирования.
Увеличение индуктивности приводит к уменьшению общей колебательности системы только до того ее значения, при котором наступает равенство резонансных пиков. Дальнейшее увеличение индуктивности вызывает возрастание колебательности. Такие условия наступают тем раньше, чем больше .
При Тэ* = 0 значения max однозначно определяются соотношением масс . Зависимости max = () и (Tм*1)опт = () при Тэ* = 0 представлены на рис. 4.19 (кривые 1 и 1'). Они иллюстрируют закономерность, согласно которой в системе без электромагнитной инерции подбором жесткости механической характеристики получить апериодический характер процессов можно только при 9. При > 9 критическому демпфированию соответствуют два значения (Тм1*.)max и два значения жесткости механической характеристики. Кривая 1' в этой области разветвляется, и заштрихованной зоне соответствуют значения Тм1*., при которых все корни уравнения (4.37) являются действительными и отрицательными.
Кривые на рис. 4.18 свидетельствуют о том, что варьирование электромагнитной инерционности двигателя позволяет получить при каждом большее демпфирование, чем при Тэ* = 0. Предельные значения логарифмического декремента, соответствующие каждому , позволяют построить зависимость пред = () и соответствующие ей зависимости (Тм1*)опт = () и (Тэ*)опт = () (кривые 2, 2' и 2" на рис. 4.19). Эти кривые показывают, что при наличии электромагнитной инерции Тэ* 0 критическое демпфирование достигается при 5,5, т. е. возможности использования демпфирующего действия электропривода в системах с малым приведенным моментом инерции механизма повышаются.
Представленные на рис. 4.18 характеристики дают возможность определять сочетания параметров, оптимальные по демпфированию колебаний в упругой разомкнутой электромеханической системе.
Пример 4.2. Определить оптимальную по критерию минимума колебательности жесткость механической характеристики электропривода постоянного тока, для которого частные параметры электрической и механической частей имеют следующие значения:

kФном=с=2,84 Вс; Rя=0,098 Ом (в нагретом состоянии машины); Тя = 0,03 с; J1 = 3,5 кгкм2; J2 = 10,5 кгм2; c12 = 548 Нм.
Определим обобщенные параметры, соответствующие (4.35):
= с2/Rя = 2,842/0,098 = 82,3 Нмс;
![]()
Рис. 4.19. Характеристики предельного демпфирования.
 1/с
1/с
Тэ* = Тэ12 = 0,0314,45 = 0,43; (Тм1*)е = J112 / = 3,514,45 / 82,3 = 0,61
При = 4,0 и Тэ* = 0,43 по кривым рис. 4.18 определяем значения max и (Тм1*) max:
max = 3,5; (Тм1*)max = 0,805
Модуль оптимальной при Тэ* = 0,43 жесткости механической характеристики
max = J112/(Тм1*)max3,514,45/0,805 = 63 Нмс,
Сравнивая max c , можно заключить, что для получения максимального демпфирования при Тя = 0,03 с жесткость механической характеристики нужно уменьшить на 24%.
Для реализации предельного демпфирования по кривым на рис. 4.18, соответствующим =4,0, необходимо обеспечить значения (Тэ*)опт = 0,29 и (Тм1*.)опт = 0,865.
Следовательно, необходимо уменьшить постоянную времени якорной цепи до значения
Тя,опт = (Тэ*)опт / 12 = 0,02 с
Требуемая для предельного демпфирования жесткость механической характеристики составит:
опт=J112/(Тм1*)опт=3,514,45/0,865=58,6 Нмс
Следовательно, для реализации предельного демпфирования упругих механических колебаний в данном случае необходимо уменьшить на 33% постоянную времени Тя и на 28,2% снизить жесткость механической характеристики . Эти изменения в разомкнутой системе могут быть с удовлетворительной точностью обеспечены увеличением сопротивления Rя на 30% путем введения соответствующего добавочного резистора. Полученные значения (Тэ*)опт и (Тм1*)опт могут быть использованы при оптимизации по критерию минимума колебательности электромеханических систем, замкнутых обратными
связями по моменту (току) и скорости.