

9.2 Интегральные оценки
Интегральные оценки качества переходных процессов дают обобщенную оценку быстроты затухания и величины отклонения регулируемой величины системы от установившегося значения (рисунок 9.4).
E(s)
Рисунок 9.4 – Структурная схема системы с отклонением E(s)
Простейшими интегральными линейными оценками являются оценки
![]() ,
,
![]() ,
,
где
![]() – отклонение (рисунок 9.5).
– отклонение (рисунок 9.5).
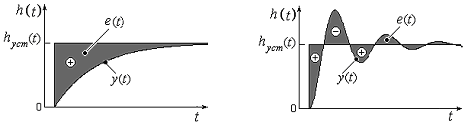
Рисунок 9.5 – Монотонный и колебательный переходные процессы
Чем меньше значение приведенных интегральных оценок, тем лучше переходный процесс.
Однако, имеют место недостатки, ограничивающие использование простейших оценок:
1) оценка I1 не может применяться к колебательному переходному процессу;
2) аналитическое вычисление I2 по коэффициентам уравнения ошибки затруднено;
3) одно значение оценки I2 может соответствовать переходным процессам с разной колебательностью (если совпадают мажоранты и миноранты).
Ограничения 1 и 2 для оценок I1 и I2 преодолеваются квадратичными оценками I и I'
![]() ,
,
![]() .
.
Ограничения I1, I2, I и I' снимаются улучшенной квадратичной оценкой
![]() .
.

9.3 Порядок выполнения работы
1. Снять переходные характеристики системы (таблица 7.1), и по ним определить показатели качества.
2. Постепенно увеличивая коэффициент усиления всей системы, вывести ее на границу устойчивости и определить kкр.
3. Замкнуть систему единичной обратной связью.
4. Получить график ошибки системы e(t). Обосновать выбор интегральной оценки.
5. Построить
асимптотическую ЛАЧХ и ЛФЧХ и по ним
оценить устойчивость системы, определить
запасы устойчивости по амплитуде и
фазе,
критическое значение коэффициента
усиления системы kкр,
частоту
среза ЛАЧХ
![]() .
.
6. По
полученным параметрам ЛАЧХ, пользуясь
номограммой /1, стр.351-353/, определить tp
и
![]() .
.
8. Сравнить показатели качества, полученные экспериментальным путем с расчетными.
9.4 Контрольные вопросы
1. Прямые и косвенные оценки качества переходного процесса.
2. Как оценивается запас устойчивости системы?
3. Каким образом можно оценить качество системы по ЛАЧХ и ЛФЧХ?
4. Как определяется предельный коэффициент усиления системы?
Лабораторная работа №10. Коррекция систем автоматического управления
Цель работы: теоретическое и экспериментальное исследование влияния корректирующих устройств системы на устойчивость и точность работы системы. Определение оптимальных параметров управляющего устройства.
10.1 Понятие о методах коррекции су. Законы регулирования
Коррекция системы управления должна обеспечить требуемые характеристики системы, т.е. заданные запасы устойчивости и показатели переходного процесса. Коррекция системы относится к области синтеза систем, так как при расчете коррекции нужно выяснить, какие дополнительные звенья должны быть введены в систему для обеспечения заданных характеристик.
Обычно необходимые запасы устойчивости и показатели переходного процесса обеспечиваются за счет добавления соответствующих корректирующих звеньев с особо подобранными передаточными функциями. Они могут включаться либо последовательно с основными звеньями СУ, либо параллельно им, или за счет введения контура обратной связи.
К корректирующим звеньям относятся типовые регуляторы, действующие по законам регулирования – зависимость, по которой формируется регулирующее воздействие u(t) на объект из первичной информации: задающее воздействие g(t), и/или вектор переменных состояний x(t) и, возможно, возмущающее воздействие f (t).
В зависимости от вида передаточной функции используются следующие корректирующие звенья: пропорциональное (П), интегральное (И), дифференциальное (Д). При сочетании можно получить типовые регуляторы следующего вида: П–регулятор, И–регулятор, ПИ–регулятор, ПИД–регулятор.