

5 Вплив параметрів , , на вигляд швидкісних (механічних) характеристик двигуна постійного струму з паралельним збудженням. Регулювання швидкості обертання двигуна
Регулюванням швидкості називається цілеспрямоване примусове зміна швидкості двигуна за допомогою спеціального пристрою або пристосування, незалежно від величини і характеру навантаження, відповідно до вимог, що пред'являються до закону руху робочого органу механізму. Встановлена при регулюванні швидкість при відсутності впливу на регулює пристосування надалі змінюється по механічній характеристиці електроприводу відповідно до навантаження. Регулювання швидкості дозволяє найбільш раціонально використовувати виробничі механізми, забезпечити оптимальні режими їх роботи і, як правило, зменшити споживання енергії.
Двигуни паралельного збудження, що живляться від джерела постійної напруги, зазвичай застосовуються для тривалого режиму роботи, коли потрібно широке регулювання частоти обертання, наприклад для металообробних верстатів, для Листоправильні машин в прокатних станах, для головних приводів трубопрокатних станів і т. п.
Вираз швидкості обертання двигуна постійного струму:
показує, що можливі три принципово різних способу регулювання кутової швидкості двигуна:
1) зміною струму збудження (магнітного потоку) двигуна;
2) зміною опору кола якоря за допомогою резисторів (реостатне);
3) із зміною підводиться до якоря двигуна напруги.
Реостатне регулювання швидкості двигуна
Реостатне
регулювання швидкості електроприводів
здійснюється шляхом зміни активних
опорів резисторів, включених до головні
ланцюги двигунів. При
цьому для двигунів постійного струму
маються на увазі резистори,
що включаються в ланцюзі обмоток
якоря. При
регулюванні швидкості опором у ланцюзі
якоря у всьому діапазоні маємо ![]() .
.
З рівняння:
видно, що включення додаткового опору в ланцюг якоря дозволяє змінювати швидкість вниз від швидкості ідеального холостого ходу, при цьому жорсткість механічних характеристик різко зменшується, особливо при великих значеннях додаткового опору (рис. 5.1).

Малюнок 5.1 - Схема включення і механічні характеристики двигуна постійного струму паралельного збудження при реостатному регулювання швидкості
Діапазон
реостатного параметричного регулювання
струму і моменту обмежений зверху
перевантажувальної здатністю двигуна
за умовами комутації, а межі зміни
швидкості, в яких можна отримати задану
точність регулювання, зменшуються з
зростанням статичної жорсткості. Таким
чином за умови М С =
const діапазон регулювання зазвичай не
перевищує 1 ![]() 3.
3.
Втрати потужності при реостатному регулювання пропорційні споживаної потужності і перепаду кутовий швидкості, висловленим у відносних одиницях. Так, якщо момент навантаження постійний (отже, постійна споживана потужність) і кутова швидкість двигуна зменшується вдвічі, то приблизно половина потужності, що споживається з мережі, буде розсіюватися у вигляді теплоти, виділеної в реостате, тобто даний спосіб регулювання (реостатний) є не економічний.
Реостатне регулювання швидкості здійснюється простими і дешевими технічними засобами і зазвичай знаходить застосування в тих випадках, коли вимоги до плавності регулювання невеликі, тривалість роботи зі зниженою швидкістю незначна і застосування більш досконалих методів регулювання економічно недоцільно (вентилятори, димососи).
Регулювання швидкості двигуна зміною напруги живлення
Для реалізації даного способу регулювання необхідно мати джерело живлення, напруга, на затискачах якого може змінюватися в широких межах. Для електродвигунів постійного струму в якості таких джерел використовуються різного роду керовані перетворювачі електричної енергії змінного струму в електричну енергію постійного струму. Найбільш широке застосування отримали електромашинні і вентильні перетворювачі. Регулювання напругою, так само як і реостатне, здійснюється при постійному потоці двигуна Ф = Ф н = const. З рівняння
випливає, що зі зміною здійснюється регулювання тільки швидкості ідеального холостого ходу

тоді як жорсткість механічних характеристик при незмінних параметрах ланцюга якоря зберігається. При цьому механічні характеристики являють собою сімейство паралельних один одному прямих, тобто мають однакову твердість (як показано на рис. 5.2), що визначає відносно високу стабільність кутовий швидкості.
Малюнок
5.2 - Механічні характеристики двигуна
при зміні живлячої напруги ( ![]() )
)
Діапазон
регулювання  в
системах приводу без зворотних зв'язків
обмежується значенням (8
10):
1, а в замкнутих системах може досягати
значень 1000:1 і більше.
в
системах приводу без зворотних зв'язків
обмежується значенням (8
10):
1, а в замкнутих системах може досягати
значень 1000:1 і більше.
Модуль жорсткості механічних штучних характеристик менше, ніж модуль жорсткості природної характеристики. Однак у порівнянні з реостатним регулюванням при регулюванні в зоні низьких швидкостей модуль жорсткості характеристик виявляється значно більшим, що дає можливість істотно розширити діапазон регулювання швидкості.
Регулювання кутової швидкості здійснюється вниз від основної, так як напруга, що прикладається до якоря, в більшості випадків може змінюватися тільки вниз від номінального (іноді, наприклад, при регулюванні кутової швидкості двигуна з постійними магнітами можливе регулювання як вниз, так і вгору від основної швидкості - двухзонной).
Оцінивши технічні та економічні показники параметричного регулювання швидкості зміною напруги, можна прийти до висновку, що високі технічні показники регулювання швидкості купуються ціною значного збільшення габаритів і вартості електропривода. Додаткові витрати, пов'язані з введенням керованого перетворювача, повністю окупаються високою керованістю системи, що забезпечує можливість ефективного автоматичного управління всіма режимами роботи електропривода і точного автоматичного регулювання його координат.
Регулювання швидкості двигуна зміною потоку збудження
Цей принцип регулювання слід безпосередньо з аналізу виразів для швидкісної і механічної характеристики:
![]()
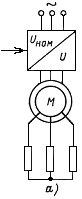
Струм збудження, а значить, і потік можуть змінюватися лише в бік зменшення в порівнянні з номінальними, так як за умовами нормальної роботи обмотки збудження струм в ній не може тривало перевершувати номінальну величину. Крім того, навіть короткочасне збільшення виявляється неефективним, тому що в більшості випадків магнітні кола електричних машин вже при номінальному потоці близькі і насичення. Отже, мова йде лише про регулювання швидкості шляхом зниження потоку або, як прийнято говорити, шляхом ослаблення потоку збудження. Основною перевагою даного методу регулювання є те, що потужність обмотки збудження невелика і становить, як правило, 2 5% потужності двигуна. Для машин малої, а іноді і середньої потужності зазвичай використовуються резистори в колі збудження (рис. 5.3, а), а для великих машин - спеціальні перетворювачі, наприклад генератори, електромашинні підсилювачі, магнітні підсилювачі, регулятори напруги, вентильні перетворювачі (рис. 5.3, б).

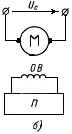
Малюнок 5.3 - Схеми включення двигуна при регулюванні швидкості зміною магнітного потоку
З рівності
![]()
випливає, що для того, щоб при різних потоках ерс була дорівнює одному і тому ж номінальній напрузі мережі , Частота обертання повинна збільшуватися назад пропорційно ослаблення потоку. Наприклад, якщо потік ослаблений вдвічі, то частота обертання повинна збільшитися також удвічі і т. д.
Електромеханічним
характеристикам ![]() при
зміні струму збудження відповідають різні
значення кутової швидкості ідеального
холостого ходу, що визначаються за:
при
зміні струму збудження відповідають різні
значення кутової швидкості ідеального
холостого ходу, що визначаються за:
![]()
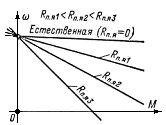
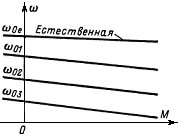
На рис. 5.4 по осі ординат відкладено значення кутової швидкості ідеального холостого ходу для природної характеристики, коли потік .
Значення
кутових швидкостей ідеального холостого
ходу при ослабленому потоці ![]() і
лежать,
очевидно, вище
.
і
лежать,
очевидно, вище
.
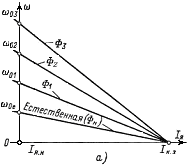
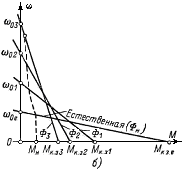
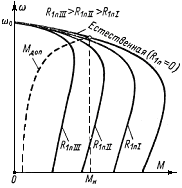
Малюнок 5.4 - Електромеханічні і механічні характеристики двигуна постійного струму паралельного збудження при регулюванні кутової швидкості струмом порушення
Всі електромеханічні характеристики перетинаються з віссю абсцис в одній точці. Останнє випливає з того, що при рівняння для будь-якої електромеханічної характеристики має вигляд:
![]()
звідки визначається струм в якорі двигуна
 .
.
Отже, при різних струмах порушення і при кутовий швидкості двигуна, що дорівнює нулю, струм в якірного ланцюга дорівнює струму короткого замикання двигуна. Цим значенням струму і визначається загальна точка перетину електромеханічних характеристик.
Механічні характеристики, показані на рис. 5.4, мають ті ж значення кутових швидкостей ідеального холостого ходу, що і для електромеханічних характеристик. Це випливає з . Однак ці характеристики не перетинаються в одній точці на осі абсцис, так як у міру зменшення потоку зменшується і момент короткого замикання, що визначається за формулою:
![]()
Діапазон
регулювання обмежується різними
чинниками. Головним
з них є погіршення умов комутації з
зростанням кутовий швидкості, оскільки
реактивна ЕРС, що викликає іскріння на
колекторі пропорційна току і кутовий
швидкості, тобто ![]() . Крім
того, при великих кутових швидкостях
потрібно підвищувати механічну міцність
якоря. Нижня
межа кутовий швидкості обмежується
ступенем насичення машини і нагріванням
обмотки збудження, тобто номінальною
кутовою швидкістю. Більшість
двигунів незалежного збудження, не
призначених для регулювання швидкості,
і допускають підвищення її тільки на
10
20%. Двигуни,
спеціально сконструйовані для роботи
з регулюванням швидкості, дають можливість
працювати зі швидкістю, в 3
5
разів перевищує швидкість ідеального
холостого ходу при номінальному значенні
магнітного потоку.
. Крім
того, при великих кутових швидкостях
потрібно підвищувати механічну міцність
якоря. Нижня
межа кутовий швидкості обмежується
ступенем насичення машини і нагріванням
обмотки збудження, тобто номінальною
кутовою швидкістю. Більшість
двигунів незалежного збудження, не
призначених для регулювання швидкості,
і допускають підвищення її тільки на
10
20%. Двигуни,
спеціально сконструйовані для роботи
з регулюванням швидкості, дають можливість
працювати зі швидкістю, в 3
5
разів перевищує швидкість ідеального
холостого ходу при номінальному значенні
магнітного потоку.
Стабільність
кутовий швидкості при регулюванні
визначається відносним перепадом
кутовий швидкості при зміні навантаження. У
даному випадку при номінальному струмі
якоря як 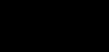 ,
Тому незалежно від струму збудження
відносний перепад зберігається одним
і тим же для природного та штучного
характеристик, тобто кутова швидкість
порівняно стабільна.
,
Тому незалежно від струму збудження
відносний перепад зберігається одним
і тим же для природного та штучного
характеристик, тобто кутова швидкість
порівняно стабільна.
Слід
відзначити, що ослаблення потоку
однозначно призводить до зростання
швидкості тільки в тому випадку, коли
момент навантаження на валу двигуна
обернено пропорційний швидкості. Якщо
ж
=
Const, то збільшення швидкості буде мати
місце лише до певного значенні ![]() . При
подальшому зниженні потоку почнеться
і зниження кутової швидкості, так як у
випадку
=
Const ослаблення потоку призводить до
збільшення струму якоря
. При
подальшому зниженні потоку почнеться
і зниження кутової швидкості, так як у
випадку
=
Const ослаблення потоку призводить до
збільшення струму якоря ![]() ,
А значить, і до збільшення падіння
напруги на опорах ланцюга якоря. Починаючи
з деякого значення потоку в процесі його
зниження зростання швидкості ідеального
холостого ходу
йде
повільніше, ніж зменшується швидкість,
обумовлена падінням
напруги на
.
,
А значить, і до збільшення падіння
напруги на опорах ланцюга якоря. Починаючи
з деякого значення потоку в процесі його
зниження зростання швидкості ідеального
холостого ходу
йде
повільніше, ніж зменшується швидкість,
обумовлена падінням
напруги на
.
Оцінюючи енергетичні показники даного способу регулювання швидкості двигунів постійного струму з паралельним збудженням, необхідно відзначити, що втрати в силовому ланцюзі двигуна і його ККД такі ж, як і під час роботи на природній характеристиці. Слід також враховувати, що у зв'язку з відносно малою потужністю ланцюга обмотки збудження в порівнянні з номінальною потужністю двигуна витрати на регулювальні пристрої (реостати або перетворювачі в ланцюзі обмотки збудження) невеликі.
Двигуни незалежного збудження, регульовані шляхом ослаблення потоку, широко застосовуються для приводу механізмів, потужність яких зі зміною швидкості залишається постійною.
6 Вплив параметрів (Опір роторної ланцюга), , F на вигляд механічних характеристик асинхронного двигуна з короткозамкненим та фазним ротором. Способи регулювання швидкості обертання асинхронних двигунів
в останні роки з розвитком напівпровідникової техніки все більша увага приділяється застосуванню різних систем регульованих електроприводів змінного струму з асинхронними двигунами з короткозамкненим або фазним ротором.
Застосування двигунів змінного струму обумовлена їх простотою, дешевизною, підвищеною надійністю, істотно (у 2 3 рази) меншими габаритами і масою в порівнянні з двигунами постійного струму. Крім того, деякі способи регулювання кутової швидкості не вимагають спеціальних перетворювальних пристроїв.
Відзначаючи переваги двигунів змінного струму, не можна не звернути уваги на те, що відносно прості способи регулювання кутової швидкості електроприводів змінного струму володіють і рядом недоліків, до яких можна віднести в одному випадку невелику плавність, в іншому - невисокі енергетичні показники і т. д. Більше ефективні способи регулювання здійснюються за допомогою порівняно складних перетворювальних пристроїв і засобів управління.
Найбільшого поширення набули наступні способи регулювання кутової швидкості асинхронного двигуна: 1) реостатне регулювання; 2) перемиканням кількості пар полюсів; 3) частотне регулювання; 4) зміною напруги на статорі; 5) каскадним включенням асинхронного двигуна з іншими машинами або перетворювачами. Для регулювання кутової швидкості, крім згаданих, можуть бути використані деякі інші способи включення електричних двигунів: імпульсне регулювання, регулювання зміною підводиться до статора напруги, регулювання за допомогою електромагнітної муфти ковзання і ін
Реостатне регулювання кутової швидкості асинхронних двигунів
Введення резисторів в ланцюг ротора (реостатне регулювання) дозволяє, як і для двигунів постійного струму, регулювати кутову швидкість двигуна. Регулювання здійснюється вниз від основної кутовий швидкості. Плавність регулювання залежить від числа ступенів включаються резисторів.
Для асинхронних двигунів з фазним ротором застосовується регулювання швидкості шляхом зміни опорів в ланцюзі ротора, а для двигунів з короткозамкненим ротором використовуються опору в ланцюзі статора, як це показано на рис. 6.1
 а)
а) 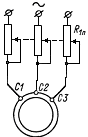 б)
б)
Малюнок 6.1-Схеми включення резисторів в ланцюг ротора а) і статора б)
 (6-1)
(6-1)
Згідно виразами (6-1) при збільшенні активного опору вторинної ланцюга збільшується критичне ковзання, і механічна характеристика стає більш м'якою (див. рис. 6.2).
а) б)
Малюнок 6.2 - Механічні характеристики асинхронного двигуна при регулюванні швидкості зміною опору в ланцюзі ротора а) і статора б)
При збільшенні ковзання в 2 рази в порівнянні з номінальною, тобто при зниженні швидкості всього лише на 8 15%, допустимий момент зменшується в 2 рази. З цієї причини діапазон регулювання зазвичай не перевищує (1,5 2): 1.
При незмінному моменті навантаження і реостатному управлінні втрати потужності в роторної ланцюга змінюються пропорційно ковзання, а втрати в статорі не залежать від ковзання і залишаються незмінними при даному моменті навантаження. Якщо, наприклад, швидкість двигуна знижена вдвічі в порівнянні з номінальною, то приблизно половина всієї споживаної з мережі потужності втрачається у регулювальних резисторах. Отже, із зростанням регулювального опору при одному і тому ж ковзанні знижується к. п. д.
Даний спосіб регулювання швидкості пов'язаний зі значними втратами енергії в додатковому опорі і тому малоекономічен. Він застосовується головним чином при короткочасній або повторно-короткочасній роботі (наприклад, пуско-налагоджувальні режими деяких машин, крани пристрої та інші), а також у приводах з вентиляторним моментом. В останньому випадку потужність на валу із зменшенням швидкості швидко знижується, і тому потужність ковзання і втрати в ланцюзі ротора за величиною обмежені.
До недоліків реостатного регулювання швидкості ставляться також м'якість механічних характеристик і залежність діапазону регулювання від величини навантаження. Зокрема, регулювання швидкості на холостому ходу практично неможливо.
Реостатне регулювання швидкості асинхронного двигуна з фазним ротором продовжує знаходити практичне застосування при невисоких вимогах до точності регулювання.
Реостатне регулювання завдяки своїй простоті знаходить практичне застосування, наприклад, в приводі підйомно-транспортних пристроїв, вентиляторів і насосів малої та середньої потужності (до 100 кВт).
Регулювання кутової швидкості асинхронного електроприводу зміною напруги
Якщо регулювати напругу, що підводиться до трьох фаз статора асинхронного двигуна, то можна, нехтуючи впливом регулюючого пристрою на характеристики двигуна, змінювати максимальний момент, не змінюючи критичного ковзання. Для зміни напруги на затискачах статора можуть використовуватися різні пристрої: автотрансформатори, дроселі насичення, тиристорні регулятори напруги.
У разі ненасиченої магнітної кола машини максимальний момент при зниженій напрузі знижується пропорційно квадрату напруги:

де ![]() ,
, ![]() -
Відповідно максимальні моменти, що
розвиваються двигуном при зниженому і
номінальному напругах;
,
-
Відповідно максимальні моменти, що
розвиваються двигуном при зниженому і
номінальному напругах;
, ![]() -
Відповідно понижений та номінальне
напруги.
-
Відповідно понижений та номінальне
напруги.
Критичне ковзання, що не залежить від напруги, залишається незмінним. Не змінюється також і синхронна кутова швидкість, яка залежить тільки від частоти живлячої напруги і числа пар полюсів двигуна.
Регулювання кутової швидкості двигуна при цьому способі відбувається за рахунок зменшення модуля жорсткості механічних характеристик і здійснюється вниз від номінальної кутової швидкості. Плавність регулювання визначається плавністю зміни напруги; при застосуваннітиристорного регулятора напруги кутова швидкість регулюється безступінчатий.
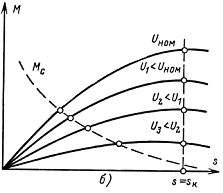
Механічні характеристики двигуна з короткозамкненим ротором при регулюванні напруги на статорі наведено на рис. 6. З цих характеристик слід, що межі регулювання вельми обмежені навіть при використанні вентиляторної навантаження, але вони можуть бути істотно розширені в замкнутих системах електроприводу. У дійсності внаслідок зменшення критичного ковзання через вплив параметрів регулюючого пристрою межі регулювання в розімкнутих системах ще зменшуються.
Так як великі втрати потужності ковзання в двигуні з короткозамкненим ротором виділяються в самому роторі, то допустимий момент різко зменшується у міру зростання ковзання, тому такий неекономічний спосіб регулювання кутової швидкості асинхронного двигуна з короткозамкненим ротором можна використовувати тільки при малій потужності двигуна й у короткочасному режимі роботи .

Малюнок 6.3 - Механічні характеристики двигуна з короткозамкненим ротором при регулюванні напруги на статорі
Краще використання двигуна і більш сприятливі характеристики можуть бути отримані, якщо застосувати двигун з фазним ротором, в роторну ланцюг його включити додатковий нерегульований резистор і регулювати напругу на статорі (рис. 6.4, а). Механічні характеристики для даного способу наведено на рис. 6.4, б. Перевага цього способу в порівнянні з реостатним полягає в тому, що управління двигуном здійснюється плавно і виключається контактна апаратура в роторної ланцюга.
Втрати енергії в приводі виходять приблизно такими ж або трохи більше, як і при реостатному регулюванні; втрати потужності ковзання в основному виносяться з двигуна і виділяються в додатковому резистори, що збільшує допустимий момент. Цей спосіб може бути використаний при вентиляторної навантаженням для тривалого режиму, а при М з = const для короткочасного режиму роботи. Очевидно, що регулювання зміною напруги може бути здійснено тільки вниз від основної кутовий швидкості.
Механічні характеристики (рис. 6.4, б) в міру зниження напруги стають м'якими і не забезпечують стабільності кутовий швидкості при можливе відхилення навантаження. Крім того, наявність постійно включеного резистора призводить до недовикористання двигуна по швидкості (кутова швидкість завжди менше номінальної) і по потужності. Підвищення стабільності кутовий швидкості і розширення діапазону регулювання до (5 10): 1 досягається у замкнутих системах.
Малюнок 6.4 - Схема включення двигуна з фазним ротором з нерегульованим резистором у роторної ланцюга і регулюванням напруги на статорі (а) і механічні характеристики (б)
Для регулювання напруги використовуються як тиристорні регулятори напруги з фазовим керуванням, так і реактори насичення, автотрансформатори і імпульсні, наприклад тиристорні або контактні регулюючі пристрої.
Якщо регулювання швидкості здійснюється за допомогою тиристорного регулятора напруги з фазовим керуванням, то виникають додаткові втрати в двигуні, обумовлені вищими гармоніками в кривій напруги. Втрати в міді статора і ротора за рахунок вищих гармонік зростають у середньому на 10%. Загальні електромагнітні втрати у міді і стали двигуна, розраховані з урахуванням вищих гармонік, зростають не більше ніж на 10-12% в порівнянні з загальними втратами, визначені при синусоїдальному напрузі.
При зниженні напруги, що підводиться до статора, зменшується магнітний потік двигуна, що при сталості моменту навантаження призводить до зростання струмів ротора і статора, тому зростають втрати і перевищення температури обмоток двигуна. Зростання втрат і, крім того, погіршення умов вентиляції двигуна зі зменшенням кутовий швидкості призводить до необхідності зниження допустимої моменту.
Регулювання швидкості зміною напруги, що підводиться до статора, знаходить застосування переважно при використанні двигунів невеликої потужності (до 20 30 кВт) з контактними кільцями при включенні додаткового опору в роторної ланцюга для механізмів повторно-короткочасного і короткочасного режимів роботи.
Частотне регулювання швидкості асинхронних електроприводів
Принципова
можливість регулювання кутової швидкості
асинхронного двигуна зміною частоти
напруги живлення ![]() слід
безпосередньо з виразу:
слід
безпосередньо з виразу:
 .
.
Харчування асинхронних двигунів здійснюється при цьому не від загальної мережі, а від перетворювача частоти ПЧ, показаного на рис. 6.5,енергія до якого підводиться від мережі постійної частоти f 1С та напруги U 1С. На виході перетворювача, як правило, змінюється не тільки частота f 1, але й напруга U 1. Для перетворення частоти можуть бути використані електромашинні або напівпровідникові пристрої, що розрізняються за принципом дії і конструкції.
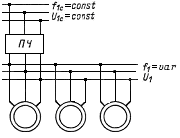
Малюнок 6.5 - Схема включення асинхронних двигунів, які отримують живлення від перетворювача частоти
При регулюванні частоти виникає також необхідність регулювання напруги джерела живлення. Дійсно, е.. д. с. обмотки статора асинхронного двигуна пропорційна частоті і потоку:
З
іншого боку, нехтуючи в першому наближенні
падінням напруги на опорах обмотки
статора, тобто вважаючи ![]() ,
Можна записати:
,
Можна записати:
![]()
Або
З
наведеного вираження випливає, що при
незмінній напрузі джерела живлення
і
регулювання його частоти змінюється
магнітний потік асинхронного
двигуна. Зокрема,
зменшення частоти
призводить
до зростання потоку і як наслідок до
насичення машини і збільшення струму
намагнічування, що пов'язано з
погіршенням енергетичних показників
двигуна, а в ряді випадків і з його
неприпустимим нагріванням. Збільшення
частоти
призводить
до зниження потоку двигуна, що при
постійному моменті навантаження на
валу відповідно, з виразом ![]() призводить
до зростання струму ротора, тобто до
перевантаження його обмоток по струму
при недовикористаної сталі. Крім
того, з цим пов'язано зниження максимального
моменту і перевантажувальної здатності
двигуна. Для
найкращого використання асинхронного
двигуна при регулюванні швидкості
зміною частоти необхідно регулювати
напругу одночасно вфункції частоти
і навантаження.
призводить
до зростання струму ротора, тобто до
перевантаження його обмоток по струму
при недовикористаної сталі. Крім
того, з цим пов'язано зниження максимального
моменту і перевантажувальної здатності
двигуна. Для
найкращого використання асинхронного
двигуна при регулюванні швидкості
зміною частоти необхідно регулювати
напругу одночасно вфункції частоти
і навантаження.
Регулювання напруги лише у функції однієї частоти з урахуванням характеристики механізму може бути реалізовано в розімкнутих системах частотного керування.
Регулювання напруги в функції навантаження можна здійснити, як правило, лише в замкнутих системах, в яких при використанні зворотних зв'язків напруга при даній частоті може змінюватися в залежності від навантаження.
У міру
зниження частоти при ![]() падає
частка е.. д.
с. по
відношенню до прикладеній напрузі
внаслідок відносного зростання падіння
напруги в опорі статора із зростанням
навантаження, що призводить до зменшення
магнітного потоку, а, отже, до зниження
електромагнітного моменту. Як
наслідок зменшення магнітного потоку
і абсолютного критичного ковзання в
міру зниження частоти падає максимальний
момент і знижується жорсткість механічних
характеристик (див. рис. 6.6).
падає
частка е.. д.
с. по
відношенню до прикладеній напрузі
внаслідок відносного зростання падіння
напруги в опорі статора із зростанням
навантаження, що призводить до зменшення
магнітного потоку, а, отже, до зниження
електромагнітного моменту. Як
наслідок зменшення магнітного потоку
і абсолютного критичного ковзання в
міру зниження частоти падає максимальний
момент і знижується жорсткість механічних
характеристик (див. рис. 6.6).
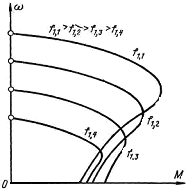
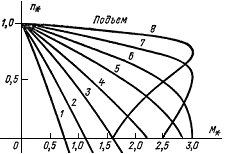
Малюнок 6.6 - Механічні характеристики асинхронного двигуна при частотному управлінні з законом .
Зміна частоти джерела живлення дозволяє регулювати швидкість асинхронного двигуна як вище, так і нижче основної. Зазвичай при регулюванні вище основної швидкості частота джерела живлення перевищує номінальну не більше ніж в 1,5 2 рази. Зазначене обмеження зумовлене, насамперед, міцністю кріплення обмотки ротора. Крім того, зі зростанням частоти харчування помітно збільшуються величини потужності втрат, пов'язані з втратами в сталі статора. Регулювання швидкості вниз від основної, як правило, здійснюється в діапазоні до 10 15. Нижня межа частоти обмежений складністю реалізації джерела живлення з низькою частотою, можливістю нерівномірності обертання і рядом інших факторів. Таким чином, частотне регулювання швидкості асинхронного двигуна може здійснюватися в діапазоні до 20-30.Використання двигунів спеціальної конструкції дає можливість розширити діапазон регулювання за рахунок збільшення верхньої межі швидкості. Нижня межа швидкості може бути зменшений шляхом введення в схему управління різних зворотних зв'язків.
Якщо
при регулюванні частоти напруга
змінюється таким чином, що Ф = const, то
допустимий момент на валу асинхронного
двигуна при частотному регулюванні
швидкості також буде незмінним ( ![]() ).
).
Цей спосіб регулювання дозволяє отримати жорсткі механічні характеристики. Втрати потужності при частотному управлінні невеликі. Це випливає з виразу
з урахуванням того, що двигун при зміні частоти працює на лінійних ділянках механічних характеристик, тобто при малих ковзаннях s. При наявності відповідного перетворювача частоти можна отримати будь-яку плавність регулювання. Важливо відзначити, що зазначені позитивні властивості можна реалізувати з безконтактним асинхронним короткозамкненим двигуном, який є найбільш простим, надійним і дешевим електричним двигуном.
Частотне регулювання кутової швидкості електроприводів змінного струму з двигунами з короткозамкненим ротором знаходить все більше застосування в різних галузях техніки. Наприклад, в установках текстильної промисловості, де за допомогою одного перетворювача частоти, який живить групу асинхронних двигунів, що знаходяться в однакових умовах, плавно і одночасно регулюються їх кутові швидкості.Прикладом іншої установки з частотно-регульованими асинхронними двигунами з короткозамкненим ротором можуть служити транспортнірольганги в металургійній промисловості, деякі конвеєри та ін
Частотне регулювання кутової швидкості асинхронних двигунів широко застосовується в індивідуальних установках, коли потрібне отримання досить високих кутових швидкостей (наприклад, для центрифуг, шліфувальних верстатів, для приводу електрошпінделем в металорізальних верстатах з частотою обертання до 20 000 об / хв).
Економічні вигоди частотного регулювання особливо істотні для приводів, що працюють в повторно-короткочасному режимі, де має місце часта зміна напрямку обертання з інтенсивним гальмуванням.
Основним недоліком електроприводів з частотним управлінням є необхідність використання перетворювачів частоти, які в даний час характеризуються відносною складністю в схемного виконання і високою вартістю. Цей недолік обмежує застосування частотноуправляемих електроприводів. Тим не менш, переваги цих приводів настільки значні, що протягом багатьох років і в даний час ведуться інтенсивні роботи зі створення перетворювачів частоти для регулювання швидкості асинхронних двигунів.
У разі створення прийнятних за складності та вартості перетворювачів частоти частотноуправляемий привід з асинхронним короткозамкненим двигуном отримає широке поширення в техніці.