

Бурштинський енергетичний коледж Івано-Франківського національного технічного університету нафти і газу
Реферат
Тема «Причини що викликають іскріння на колекторі »
Студента:
Легіна М.І.
(прізвище, ім’я, по батькові)
Група: 2Е11-12
Спеціальність: Електрик
Викладач”
Бурштин 2012
ЗМІСТ
1 Визначення поняття «електропривод»
2 Класифікація електроприводів
3 Режими роботи електропривода
4 Рівняння руху електроприводу при поступальному і обертальному русі
5 Вплив
параметрів ![]() ,
,
,
, ![]() на
вигляд швидкісних (механічних)
характеристик двигуна постійного струму
з паралельним збудженням.Регулювання
швидкості обертання двигуна
на
вигляд швидкісних (механічних)
характеристик двигуна постійного струму
з паралельним збудженням.Регулювання
швидкості обертання двигуна
6 Вплив
параметрів
(Опір
роторної ланцюга), ![]() ,
F на вигляд механічних характеристик
асинхронного двигуна з короткозамкненим
та фазним ротором. Способи
регулювання швидкості обертання
асинхронних двигунів
,
F на вигляд механічних характеристик
асинхронного двигуна з короткозамкненим
та фазним ротором. Способи
регулювання швидкості обертання
асинхронних двигунів
7 Розрахувати для двигуна постійного струму з паралельним збудженням
з параметрами: ДП-41 щаблі пускових опорів. Зобразити схему включення опорів в ланцюг якоря і відповідні характеристики
8 Розрахувати для асинхронного двигуна з фазним ротором з параметрами: МТВ311-8 щаблі пускових опорів. Зобразити схему включення опорів в ланцюг ротора і відповідні розрахункові характеристики
Перелік використаної літератури
1 Визначення поняття «електропривод»
Електричний привід являє собою електромеханічний пристрій, призначений для приведення в рух робочого органу машини іуправління її технологічним процесом. Він складається з трьох частин: електричного двигуна, що здійснює електромеханічне перетворенняенергії, механічної частини, що передає механічну енергію робочому органу машини, і системи управління, що забезпечує оптимальне за тими чи іншими критеріями управління технологічним процесом. Характеристики двигуна і можливості системи управління визначаютьпродуктивність механізму, точність виконання технологічних операцій, динамічні навантаження механічного обладнання та ряд інших чинників. З іншого боку, навантаження механічної частини приводу, умови руху її пов'язаних мас, точність передач і т. п. впливають на умови роботи двигуна і системи управління, тому електричні і механічні елементи електроприводу утворюють єдину електромеханічну систему, складові частини якої знаходяться в тісній взаємодії .
Властивості електромеханічної системи мають вирішальний вплив на найважливіші показники робочої машини і значною мірою визначають якість і економічну ефективність технологічних процесів. Розвиток автоматизованого електропривода (Рисунок 1.1) веде до вдосконалення конструкцій машин, до корінних змін технологічних процесів, до подальшого прогресу у всіх галузях народного господарства.
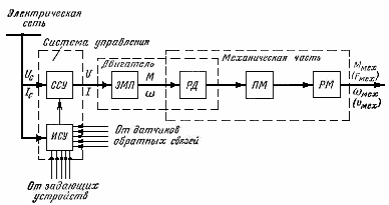
Малюнок 1.1 - Схема автоматизованого електропривода
2 Класифікація електроприводів
Електроприводи зі способів розподілу механічної енергії можна розділити на три основні типи: груповий електропривод; індивідуальний і взаємопов'язаний.
Груповий електропривод забезпечує рух виконавчих органів декількох робочих машин або декількох виконавчих органів однієї робочої машини. Передача механічної енергії від одного двигуна до декількох робочих машин і її розподіл між ними здійснюється за допомогою однієї або декількох трансмісій. Такий груповий привід називають також трансмісійним (рисунок 2.1).
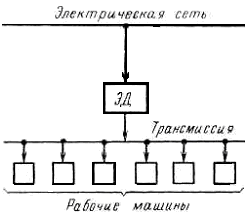
Малюнок 2.1 - Структурна схема групового трансмісійного електроприводу
Внаслідок свого технічну недосконалість трансмісійний електропривод в даний час майже не застосовується, він поступився місцем індивідуальному і взаємопов'язаному, хоча в ряді випадків ще знаходить застосування і групової привід за схемою на малюнку 2.2.
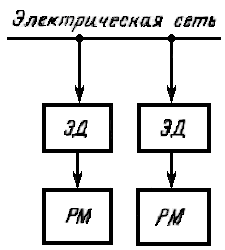
Малюнок 2.2 - Структурна схема групового електроприводу
Індивідуальний привід в порівнянні з трансмісійним і груповим має низку переваг: виробничі приміщення не загромождают важкими трансмісіями і передавальними пристроями; поліпшуються умови роботи і підвищується продуктивність праці внаслідок полегшення управління окремими механізмами, зменшення запиленості приміщень, кращого освітлення робочих місць; знижується травматизм обслуговуючого персоналу. Крім того, індивідуальний електропривод відрізняється більш високими енергетичними показниками.
У трансмісивному приводі при виході з ладу або при ремонті електродвигуна вибуває з роботи група машин, тоді як у випадку індивідуального приводу або групового за схемою на малюнку 2.2 зупинка одного електродвигуна викликає зупинку лише однієї робочої машини.
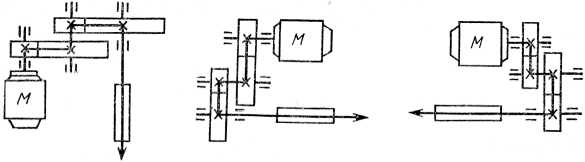
Малюнок 2.3 - Індивідуальні електроприводи робочих органів (шпинделів) поздовжньо-фрезерного верстата
Індивідуальний електропривод широко застосовується в різних сучасних машинах, наприклад у складних металорізальних верстатах, в прокатних станах металургійного виробництва, в підйомно-транспортних машинах, екскаваторах, в роботах-маніпуляторах і т. п.
Прикладом використання індивідуального приводу може служити поздовжньо-фрезерний верстат (рисунок 2.3), що має окреміелектроприводи головних рухів (приводи трьох шпиндельних бабок).
Взаємопов'язаний електропривод містить два або кілька електрично або механічно пов'язаних між собою електродвигунні пристрою (абоелектроприводів), при роботі яких підтримується заданий співвідношення або рівність швидкостей або навантажень або положення виконавчих органів робочих машин. Необхідність у такому приводі часто виникає з конструктивним плі технологічних міркувань.
Прикладом взаємопов'язаного електроприводу може служити привід ланцюгового конвеєра. На малюнку 2.4 показана схема такого приводу, робочим органом якого є ланцюг, що приводиться в рух двома або кількома двигунами (М1, М2), розташованими вздовж ланцюга. Ці двигуни мають вимушено однакову швидкість.
Взаємопов'язаний електропривод широко застосовується в різних сучасних машинах і агрегатах, наприклад в копіювальних металорізальних верстатах і верстатах з програмним управлінням, на машинах з, ротаційних машинах поліграфічного виробництва, і текстильних агрегатах, в прокатних станах металургійного виробництва, у потокових технологічних лініях але виробництва шинного корду, синтетичних плівок і т. д.
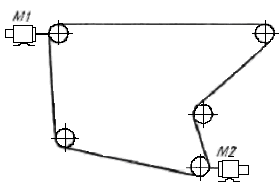
Рисунок 2.4 - Схема взаємопов'язаного приводу конвеєра
По виду руху електроприводи можуть забезпечити: обертальне односпрямоване рух, обертальний реверсивний та поступальний реверсивний руху.
Обертальний односпрямоване, а також реверсивний рух здійснюється електродвигунами звичайного виконання. Поступальний рух може бути отримано шляхом використання електродвигуна обертального руху звичайного виконання спільно з преосвітнім механізмом (кулісним, гвинтовим, рейковим і т. п.) або застосування електродвигуна спеціального виконання для поступального руху (так звані лінійніелектродвигуни, магнітогідродинамічних двигуни).
За ступенем керованості електропривод може бути:
1) нерегульований - для приведення в дію виконавчого органу робочої машини з однієї робочої швидкістю, параметри приводу змінюються тільки в результаті збурюючих впливів;
2) регульований - для сполучення змінною плі незмінної швидкості виконавчому органу машини, параметри приводу можуть змінюватися під впливом керуючого пристрою;
3) програмно-керований - керований відповідно до заданої програми;
4) стежить - автоматично відробляє переміщення виконавчого органу робочої машини з певною точністю відповідно до довільно мінливим задає сигналом;
5) адаптивний - автоматично обирає структуру або параметри системи керування при зміні умов роботи машини з метою вироблення оптимального режиму.
Можна класифікувати електроприводи і за родом передавального пристрою. У цьому сенсі електропривод буває:
1) редукторний, в якому електродвигун передає обертальний рух передавальним пристрою, який містить редуктор;
2) безредукторний, в якому здійснюється передача руху від електродвигуна або безпосередньо робочому органу, або через передавальний пристрій, що не містить редуктор.
За рівнем автоматизації можна розрізняти:
1) неавтоматизованих електропривод, в якому управління ручне; в даний час такий привід зустрічається рідко, переважно в установках малої потужності побутової та медичної техніки і т. п.;
2) автоматизований електропривод, керований автоматичним регулюванням параметрів;
3) автоматичний електропривод, в якому керуючий вплив виробляється автоматичним пристроєм без участі оператора.
Два останніх типу електропривода знаходять застосування в переважній більшості випадків.
Нарешті, за родом струму застосовуються електроприводи постійного та змінного струму.