

Н агрузочная диаграмма.
M (Нм) M3 M3
M1 M1
M2 M2
M4 M4
t1 t2 t3 t4 t0 t1 t2 t3 t4
t (c)
Содержание РГР:
Провести анализ заданной схемы электропривода постоянного тока и построить развертки цепей главного тока. (Внимание! При в приведенных вариантах схем привода введены ошибки, поэтому при анализе схемы необходим их исправить.)
По заданной нагрузочной диаграмме выбрать двигатель постоянного тока и проверить правильность выбора.
Рассчитать механические характеристики для каждой скорости, предусмотренных схемой электропривода.
Выбрать защитно-коммутационную аппаратуру.
Вариант 1. Схема электропривода грузового механизма с силовым кулачковым контроллером.
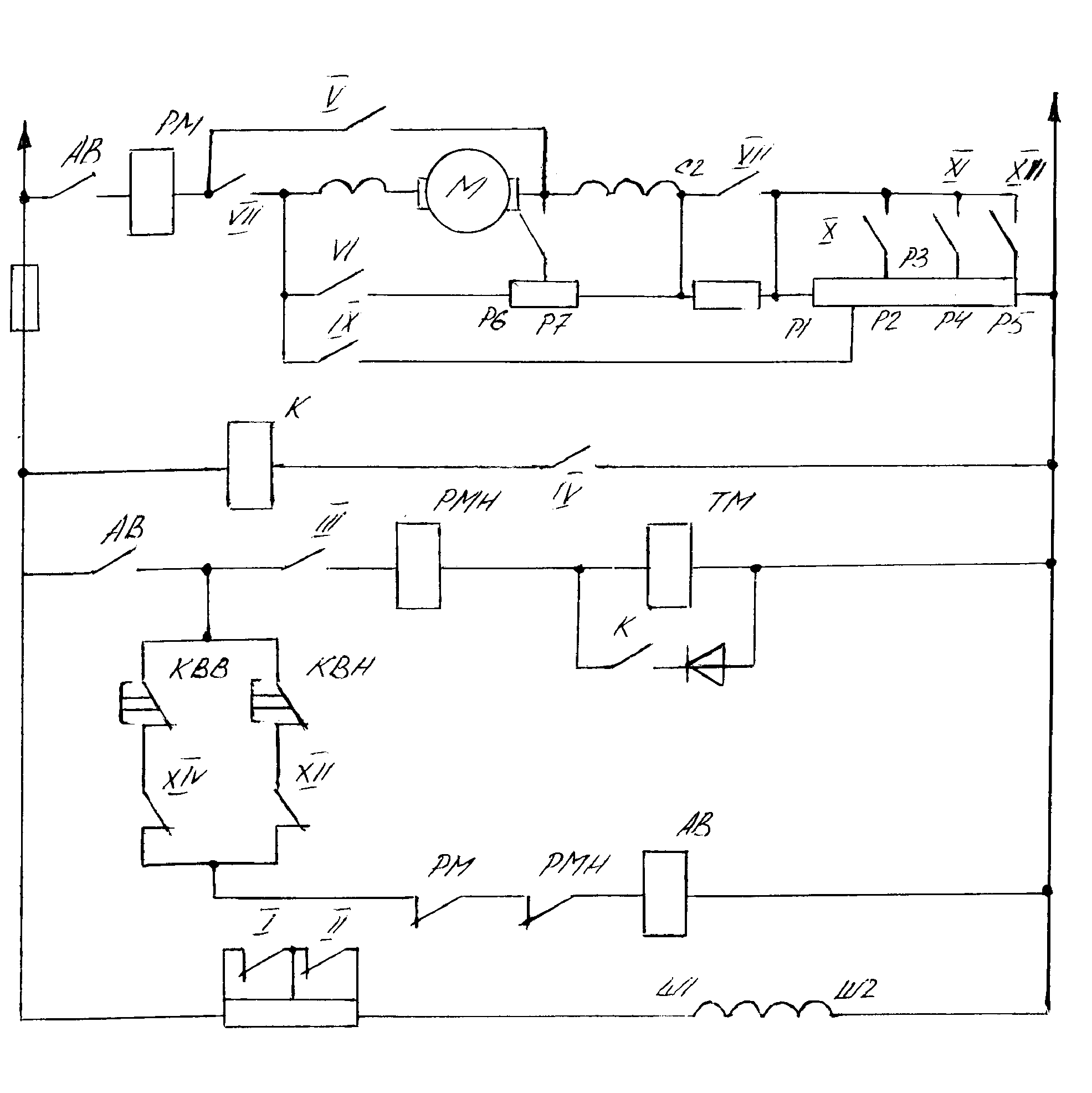
Значения
сопротивлений: Р1-Р2=19% Р2-Р3=15% Р3-Р4=27% Р4-Р5=15% Р6-Р7=60% С3-Р1=200% от
номинального сопротивления
электродвигателя. |
Травить |
0 |
Выбирать |
||||||||
5 |
4 |
3 |
2 |
1 |
1 |
2 |
3 |
4 |
5 |
||
I |
|
X |
X |
X |
X |
X |
X |
X |
X |
X |
|
II |
X |
|
X |
X |
X |
|
X |
|
|
|
|
III |
X |
X |
X |
X |
X |
|
X |
X |
X |
X |
X |
IV |
|
|
|
X |
X |
|
|
|
|
|
X |
V |
X |
X |
X |
X |
|
|
|
|
|
|
|
VI |
|
|
|
X |
X |
X |
|
|
|
|
|
VII |
|
|
|
|
|
|
X |
X |
X |
X |
X |
VIII |
|
|
|
|
|
|
X |
X |
X |
X |
X |
IX |
X |
X |
X |
X |
|
|
|
|
|
|
|
X |
X |
X |
X |
|
|
|
|
X |
X |
X |
X |
XI |
X |
X |
|
|
|
|
|
|
X |
X |
X |
XII |
X |
|
|
|
|
|
|
|
|
X |
X |
XIII |
X |
X |
X |
X |
X |
X |
|
|
|
|
|
XIV |
|
|
|
|
|
X |
X |
X |
X |
X |
X |
Вариант 2. Схема электропривода якорно-швартовного устройства постоянного тока с силовым кулачковым контроллером.
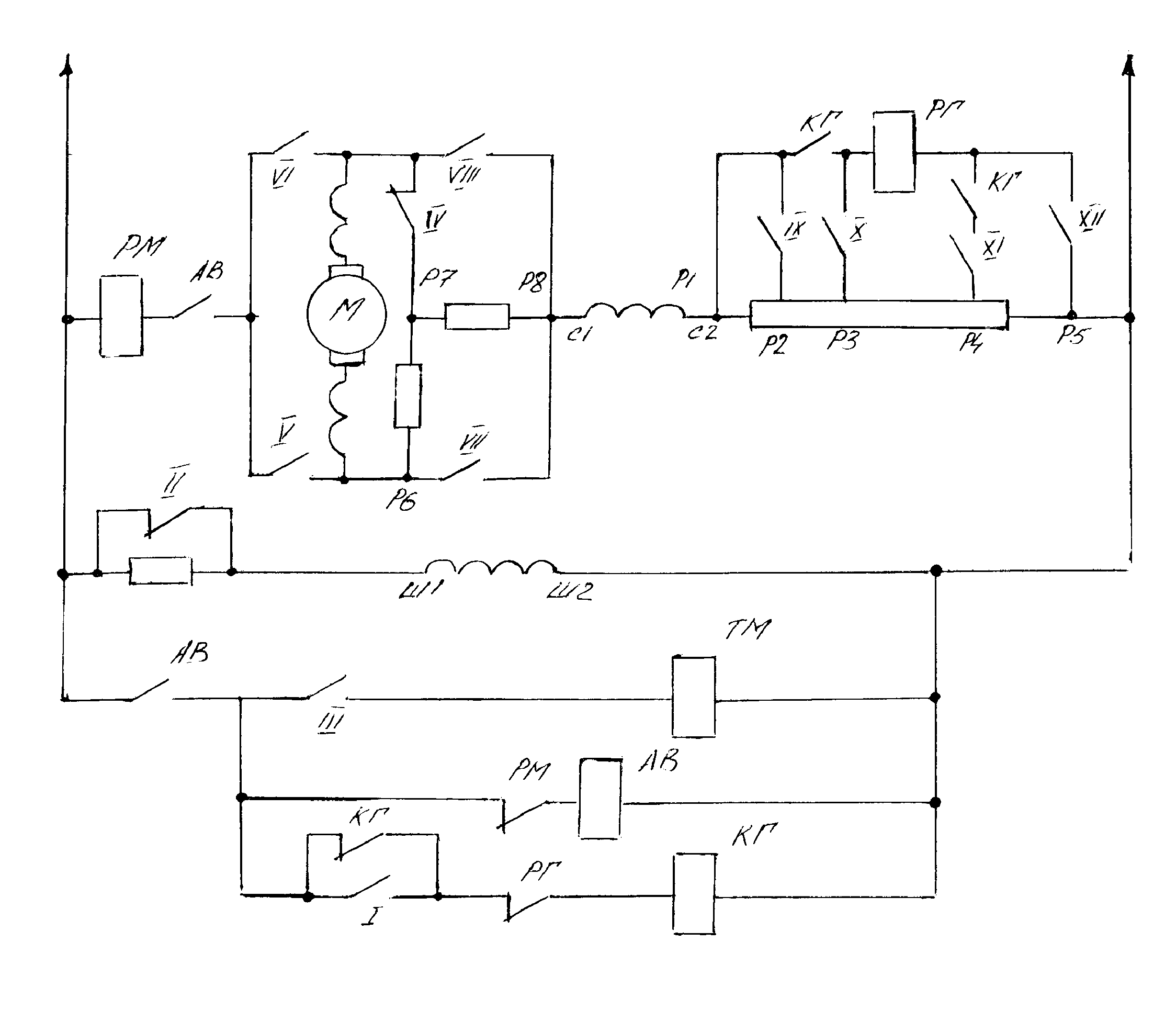
Значения
сопротивлений: Р1-Р2=34% Р2-Р3=26% Р3-Р4=15% Р4-Р5=9% Р6-Р7=50% P7-P8=280% от
номинального сопротивления
электродвигателя.
В положении 6
«Выбирать» FПР
ослабляется на 50%. |
Травить |
0 |
Выбирать |
|||||||||||
6 |
5 |
4 |
3 |
2 |
1 |
1 |
2 |
3 |
4 |
5 |
6 |
|||
I |
|
|
|
X |
X |
X |
X |
X |
X |
X |
|
|
|
|
II |
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
III |
X |
X |
X |
X |
X |
X |
|
X |
X |
X |
X |
X |
X |
|
IV |
|
|
|
|
|
X |
X |
X |
|
|
|
|
|
|
V |
X |
X |
X |
X |
X |
X |
|
|
|
|
|
|
|
|
VI |
|
|
|
|
|
|
|
X |
X |
X |
X |
X |
X |
|
VII |
|
|
|
|
|
|
|
X |
X |
X |
X |
X |
X |
|
VIII |
X |
X |
X |
X |
X |
X |
|
|
|
|
|
|
|
|
IX |
X |
X |
X |
X |
|
|
|
|
|
X |
X |
X |
X |
|
X |
|
X |
X |
|
|
|
|
|
|
|
X |
X |
|
|
XI |
X |
X |
|
|
|
|
|
|
|
|
|
X |
X |
|
XII |
X |
|
|
|
|
|
|
|
|
|
|
|
X |
|
Вариант 3. Схема электропривода якорно-швартовного устройства постоянного тока с силовым кулачковым контроллером.

Значения
сопротивлений: Р1-Р2=46% Р2-Р3=28% Р3-Р4=15% Р5-Р6=50% Р6-Р7=280% от
номинального сопротивления
электродвигателя. При
размыкании контакта III
Fпр ослабляется на
30%. |
Травить |
0 |
Выбирать |
||||||||
5 |
4 |
3 |
2 |
1 |
1 |
2 |
3 |
4 |
5 |
||
I |
|
|
|
|
|
X |
X |
X |
X |
X |
X |
II |
X |
X |
X |
X |
X |
X |
|
|
|
|
|
III |
X |
X |
X |
X |
X |
|
X |
X |
X |
X |
|
IV |
X |
X |
X |
X |
X |
|
X |
X |
X |
X |
X |
V |
|
|
|
|
|
|
X |
X |
X |
X |
X |
VI |
X |
X |
X |
X |
X |
|
|
|
|
|
|
VII |
X |
X |
X |
X |
X |
|
|
|
|
|
|
VIII |
|
|
|
|
|
|
X |
X |
X |
X |
X |
IX |
|
|
|
|
X |
X |
X |
|
|
|
|
X |
X |
X |
X |
|
|
|
|
|
X |
X |
X |
XI |
X |
X |
|
|
|
|
|
|
|
X |
X |
XII |
X |
|
|
|
|
|
|
|
|
|
X |
Вариант 4. Электропривод грузового механизма с силовым кулачковым контроллером.
Значения
сопротивлений:
P2-Р6=50%
Р2-Р3=150%
Р3-Р4=31%
Р4-Р5=17%
Р6-Р3=18%
от номинального
сопротивления электродвигателя.
При размыкании
контакта III Fпр
ослабляется на 50%.
Номер контакта |
Травить |
0 |
Выбирать |
|||||||
4 |
3 |
2 |
1 |
|
1 |
2 |
3 |
4 |
5 |
|
I |
|
|
|
|
X |
X |
X |
X |
X |
X |
II |
X |
X |
X |
X |
X |
|
|
|
|
|
III |
|
X |
X |
X |
|
X |
X |
X |
X |
|
IV |
X |
X |
X |
X |
|
X |
X |
X |
X |
X |
V |
X |
X |
X |
X |
|
|
|
|
|
|
VI |
X |
X |
X |
X |
|
X |
X |
X |
X |
X |
VII |
|
|
|
|
|
X |
X |
X |
X |
X |
VIII |
X |
X |
|
|
|
|
|
|
X |
X |
IX |
X |
X |
X |
X |
X |
|
|
|
|
|
X |
X |
|
|
|
|
|
|
X |
X |
X |
XI |
|
|
X |
X |
X |
X |
X |
|
|
|
XII |
|
|
X |
X |
|
|
X |
X |
X |
X |