

9.3.9 Использование цип для измерения переменных напряжений
Часто приходится иметь дело с измерением переменных напряжений и токов. Многофункциональные ЦИП – мультиметры выполняют, как правило, на основе ЦВ, дополненных преобразователями входной величины в постоянное напряжение. Эти преобразователи используют в виде сменных блоков. Так как получить при построении мультиметров погрешность меньше, чем при измерении постоянного напряжения, невозможно, то основной проблемой в этом случае является обеспечение высокой точности преобразователей входных величин.
Преобразователи среднего по модулю переменного напряжения (назовем сокращенно ПС) строятся на базе операционных усилителей из-за простоты схемотехнической реализации, возможности использования интегральных микросхем, высоких метрологических характеристик. Для реализации соотношения
![]() (9.29)
(9.29)
рассмотрим схему, часто используемую на практике (рис. 9.17,а). Это однополупериодное выпрямительное устройство с разделенными цепями ООС для положительной и отрицательной полуволн входного напряжения. Постоянная составляющая выходного напряжения Uвыхx, пропорциональная Uср, выделяется с помощью фильтра Ф.
Благодаря поочередной работе двух симметричных ветвей с диодами VD1 и VD2 и резисторами R2 и R3, в каждой из этих ветвей происходит однополупериодное выпрямление, но ток через резистор R1 является синусоидальным. Важно, что VD2 оказывается включенным в прямой тракт, а не в цепи ООС, поэтому нелинейность и нестабильность его характеристик почти не влияют на функцию преобразования.
Главным фактором, определяющим погрешность ПС, оказывается нелинейность и нестабильность обратных сопротивлений диодов Rобр. Действительно, с учетом приведенных диаграмм (рис. 9.17,б) имеем
![]() (9.30)
(9.30)
Если выбрать
отношение
![]() то Uвх
без учета погрешностей будет равно
действующему значению Ux.
то Uвх
без учета погрешностей будет равно
действующему значению Ux.
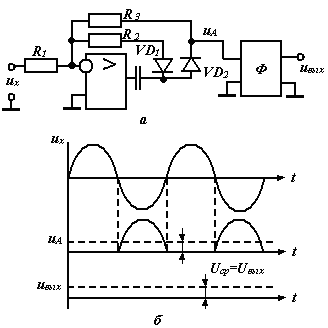
Рис. 9.17. Схема преобразователя среднего по модулю переменного напряжения (а)
и его временные диаграммы (б)
Преобразователи действующего значения напряжения (ПДЗ) должны выполнять достаточно сложный алгоритм преобразования:
![]() (9.31)
(9.31)
т.е. возведение в квадрат, усреднение по времени, извлечение корня.
До последних лет схемотехническая реализация таких алгоритмов вызывала трудности и поиски велись по проектированию элементов с квадратичной характеристикой (чаще – термопары).
В последнее время благодаря бурному развитию микроэлектроники были созданы ПДЗ, непосредственно реализующие алгоритм получения действующего значения.
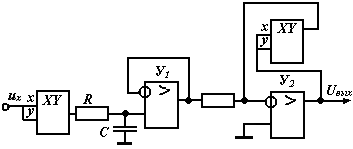
Рис. 9.18. Схема преобразователя действующего значения напряжения
10 Частотно-регулируемый электропривод
Современный частотно-регулируемый электропривод состоит из асинхронного или синхронного электрического двигателя и преобразователя частоты (рис.10.1).
Электрический двигатель преобразует электрическую энергию в механическую и приводит в движение исполнительный орган технологического механизма.
РО
Рис. 10.1. Структурная схема частотно-регулируемого электропривода (ЧРП):
ПЧ – преобразователь частоты; РО – рабочий орган (насос, станок, генератор); ЧРП
Преобразователь частоты (ПЧ) управляет электрическим двигателем и представляет собой электронное статическое устройство. На выходе преобразователя формируется электрическое напряжение с переменными амплитудой и частотой.
Название «частотно–регулируемый электропривод» обусловлено тем, что регулирование скорости вращения двигателя осуществляется изменением частоты напряжения питания, подаваемого на двигатель от преобразователя частоты.
На протяжении последних 10–15 лет в мире наблюдается широкое и успешное внедрение частотно регулируемого электропривода для решения различных технологических задач во многие отрасли промышленности. Это объясняется в первую очередь разработкой и созданием преобразователей частоты на принципиально новой элементной базе, главным образом на биполярных транзисторах с изолированным затвором IGBT.
Ниже кратко описаны известные типы преобразователей частоты, применяемые в частотно–регулируемом электроприводе, и реализованные в них методы управления.