

2.5.2 Read and traslate the text and choose the best summary below. Forces and motions
Types of Motion. — The motions of bodies may be divided into three classes: (1) translation, (2) rotation, and (3) vibration or oscillation. A body is said to have a motion of translation when it moves on continuously in the same direction. A ball thrown from the hand and an automobile running on a straight road are illustrations of motions of translation. If a body instead of travelling forward turns on fixed axis, it has a motion of rotation. Thus the flywheel of a stationary engine turns continuously around its axis without ever moving forward. Any point on the wheel returns again and again to its original position. This is a motion of rotation. The drive wheels of a locomotive are moving forward and are at the same time rotating. Therefore they have two motions, one of rotation and the other of translation. Some bodies reverse their motions from time to time and return at regular intervals to their original positions. Such bodies are said to have a motion of vibration or oscillation. The pendulum of an ordinary clock swings back and forth at regular intervals, so that the same motion is repeated again and again. The bob of the pendulum has a motion of vibration.
Summary variants:
Translation is a motion with the continuous changing of the direction, while rotating means circling and oscillation represents a periodic motion.
Translation is a continuous forward motion, while rotating means swinging back and forth and oscillation represents a motion with some intervals.
Translation is a forward motion in a straight line, while rotating means revolving on the axis and oscillation represents reversing motion with some periodicity.
2.5.3 Read the text, translate it and find out what sentences to the text are false. Speed and velosity
Speed. — The speed of a body is defined to be the rate at which the body is passing through space or the space passed over in unit time. It is determined by dividing the space over which a body has passed by the time required to pass over that space. It is a scalar quantity and has magnitude only.
Speed = space per unit time = distance / time
Velocity. — The velocity of a body has a directional quality in addition to its magnitude. Velocity is a vector quantity in contrast to speed, which is a scalar quantity. The magnitude of the velocity is the same as the numerical value of the speed. In giving the velocity of a body the direction of motion must also be specified. If it is stated that an automobile is running 30 mph the information is not sufficient to locate the machine. In addition to stating the speed of the machine, it is necessary to give the direction in which the machine is moving and the point from which it starts. Directed speed, which is called velocity, is therefore a vector quantity. The velocity of a body may change either by changing the numerical value of the speed or by changing the direction of motion. A body that is moving in a circular path with uniform speed continually changes its direction. Its velocity is therefore variable. The magnitude of the velocity = space passed over per unit time = distance : time.
Addition of Velocities. — Suppose that a railroad train is running east at 10 mph and that a man walks forward on the train at the rate of 4 mph. The man has a forward velocity because of the motion of the train and also a forward motion because of his walking. His forward velocity with respect to the earth is the sum of these two velocities, or 14 mph. Now suppose that he walks backward on the train at the rate of 4 mph. Again he has two velocities, 10 mph forward and 4 mph backward. His net velocity with respect to the earth is the difference between his forward and his backward velocity or 6 mph forward. In this case the two velocities lie along the same line and the resultant velocity is equal to the algebraic sum of the separate velocities. When the separate velocities lie along different lines, they must be added with proper regard for the directions of motion.
As an illustration of the composition of velocities that are at right angles to each other, consider the case of a man rowing a boat across a stream. The man has a velocity across the stream owing to his rowing. If the man rows at right angle to the direction in which the water flows, conditions are as represented in Figure 17a. The effect of the combined velocities is that the boat is carried across the stream and at the same time is carried down the stream. The speed at which the boat actually moves and the direction of its motion are found by constracting a rectangle so that one side represents the speed and direction of motion of the boat due to the rowing, and the other side the speed and direction of motion of the boat due to the stream alone. The actual direction of motion and speed of the boat is given by the diagonal of this rectangle.
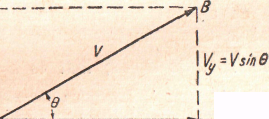
Resolution of Velocities. — As in the case of displacements, forces and other vector quantities, it is often convenient to replace a velocity by its components at right angles to each other. This process is called the resolution of velocities. Let OB, Figure 17b represent the magnitude and direction of a velocity V.
 A
A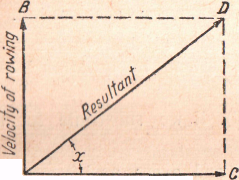 O
A
O
A
Velosity of stream Vx=VcosӨ
a b