Динамика вращения атт
При изучении вращения АТТ часто пользуются понятием момента инерции. Момент инерции тела – мера инерции твердых тел при вращательном движении. Термин момент всегда связан с вращением , при этом обязательно нужно указывать относительно чего вращается тело.
Момент инерции материальной точки
массой
![]() относительно оси вращения:
относительно оси вращения:
![]() ,
где
,
где
![]() - кратчайшее расстояние от МТ до оси.
- кратчайшее расстояние от МТ до оси.
Моментом инерции системы (тела) относительно оси вращения называется физическая величина, равная сумме произведений масс "n" материальных точек системы на квадраты их расстояний до рассматриваемой оси.
![]()
В случае непрерывного распределения
масс эта сумма сводится к интегралу
![]() .
.
Моменты инерции относительно оси вращения наиболее часто встречающихся тел сведены в таблицу.
Таблица моментов инерции некоторых тел относительно оси вращения
Тело |
Положение оси вращения |
Момент инерции |
Полый тонкостенный цилиндр радиусом R |
ось симметрии |
|
сплошной цилиндр или диск радиусом R |
ось симметрии |
|
прямой тонкий стержень длиной |
ось перпендикулярна стержню и проходит через его середину |
|
прямой тонкий стержень длиной |
ось перпендикулярна стержню и проходит через его конец |
|
шар радиусом R |
ось проходит через центр шара |
|
Если известен момент инерции тела массой
![]() относительно оси, проходящей через его
центр масс
относительно оси, проходящей через его
центр масс
![]() ,
то момент инерции этого тела
,
то момент инерции этого тела
![]() относительно любой другой параллельной
оси определяется теоремой Штейнера:
относительно любой другой параллельной
оси определяется теоремой Штейнера:
![]() , где
, где
![]() - расстояние между осями.
- расстояние между осями.
Моментом силы
относительно
неподвижной точки О (Рисунок 18)
называется векторная физическая
величина, определяемая векторным
произведением радиуса-вектора
![]() ,
проведенного из точки О в точку приложения
силы на вектор силы.
,
проведенного из точки О в точку приложения
силы на вектор силы.
![]() .
Вектор
.
Вектор
![]() является псевдовектором.
является псевдовектором.
М
Рисунок 18 Момент силы относительно
неподвижной точки О.![]()

![]() ,
где
- плечо - кратчайшее расстояние между
линией действия силы
и точкой O.
,
где
- плечо - кратчайшее расстояние между
линией действия силы
и точкой O.
М
![]()
![]() ,
равная проекции на эту ось вектора
момента силы
,
определенного относительно произвольной
точки О данной оси z.
Значение
не зависит от выбора положения
точки О на оси z.
,
равная проекции на эту ось вектора
момента силы
,
определенного относительно произвольной
точки О данной оси z.
Значение
не зависит от выбора положения
точки О на оси z.
![]()
М омент
силы относительно оси z
равен произведению момента инерции
тела относительно этой оси на угловое
ускорение - основной закон динамики
вращательного движения.
омент
силы относительно оси z
равен произведению момента инерции
тела относительно этой оси на угловое
ускорение - основной закон динамики
вращательного движения.
П
Рисунок 19. Момент силы F относительно
оси Z.
![]() .
.
Моментом импульса тела
![]() относительно неподвижной точки О
(Рисунок 20) называется векторная
физическая величина, определяемая
векторным произведением
относительно неподвижной точки О
(Рисунок 20) называется векторная
физическая величина, определяемая
векторным произведением
![]() .
.

М
O
![]()
![]() ,
где
,
где
![]() - плечо.
- плечо.
М
Рисунок 20. Момент импульса тела
относительно точки О.
О
![]() ,
равная проекции на эту ось вектора
момента импульса
,
равная проекции на эту ось вектора
момента импульса
![]() ,
определенного относительно произвольной
точки О данной оси.
,
определенного относительно произвольной
точки О данной оси.
Момент импульса АТТ относительно оси z:

![]()
Основной закон динамики вращательного движения АТТ:
![]()
Кинетическая энергия вращения тела находится как сумма кинетических энергий его элементарных объемов:
![]()
![]()
 ,
то: Евр=
,
то: Евр= .
Таким образом:
.
Таким образом:
Работа, совершаемая при вращении АТТ, идет на увеличение его кинетической энергии:
![]()
В случае плоского движения АТТ его
кинетическая энергия складывается
из энергии поступательного движения и
энергия вращательного движения
![]() ,
где с - скорость
центра масс,
,
где с - скорость
центра масс,
Ic - момент инерции относительно оси, проходящей через центр масс.
Центром масс системы называется точка
С, положение которой задает радиус-вектор
![]() .
.
![]() ,
где m – масса системы
,
где m – масса системы
![]() ,
mi –
масса i-той частицы,
,
mi –
масса i-той частицы,
![]() -
радиус - вектор i-той
частицы.
-
радиус - вектор i-той
частицы.
Декартовы координаты центра масс:
![]() ;
;
![]()
![]()
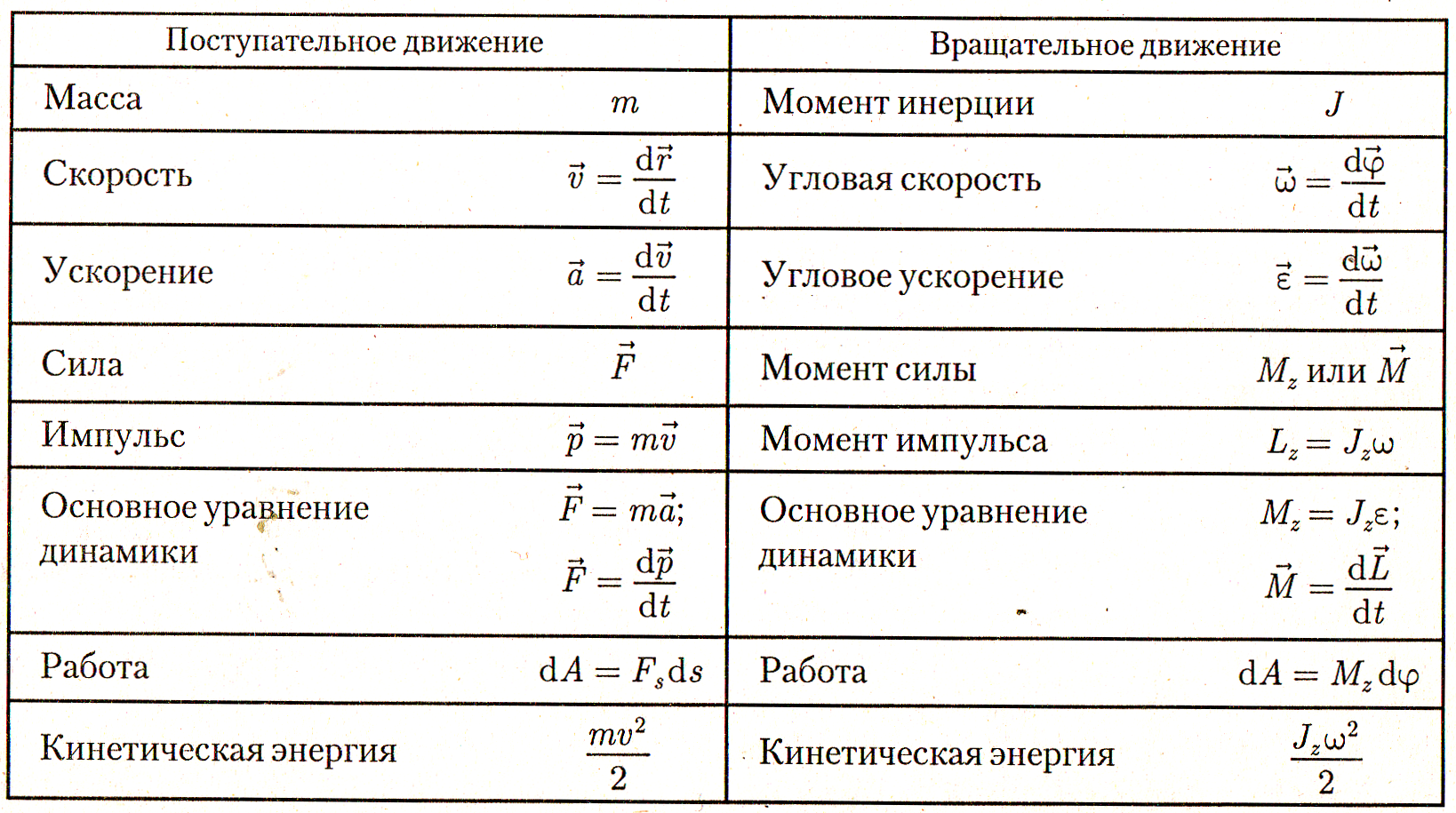
В заключении сопоставим в виде таблицы основные величины и уравнения поступательного и вращательного движения тела. В приведенной таблице прослеживается аналогия конфигурации формул для расчета физических величин поступательного и вращательного движений.