

МІНІСТЕРСТВО ОСВІТИ і науки УКРАЇНИ
тЕРНОПІЛЬСЬКИЙ ДЕРЖАВНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ ІМЕНІ ІВАНА ПУЛЮЯ
Кафедра ВІСАВ
МЕТОДИЧНІ ВКАЗІВКИ ДЛЯ САМОСТІЙНИХ ЗАНЯТЬ ТА ДО
ЛАБОРАТОРНОЇ РОБОТИ №1 (1)
ОСНОВНІ МЕХАНІЗМИ ВЕРСТАТІВ ТА
ЇХ УМОВНІ ПОЗНАЧЕННЯ
Тернопіль 2001
Методичні вказівки розроблені у відповідності з учбовими
планами спеціальностей ____________________________
Методичні вказівки розробили:
К.т.н. Р.А. Скляров
Ст. викл. М.В. Шарик
Рецензент:
Методичні вказівки розглянуті та затверджені на засіданні кафедри верстато-інструментальних систем автоматизованого виробництва
Протокол № _______________ від __________ 200__ р.
Мнтодичні вказівки розглянуті та рекомендовані до друку на засіданні методичної комісії Тернопільського державного технічного університету імені Івана Пулюя
Протокол № ______________ від ___________ 200__ р.
Основні механізми верстатів та їх умовні позначення
Мета: |
|
Завдання: |
|
|
|
|
|
Обладнання, пристосування, наочне приладдя: |
|
1
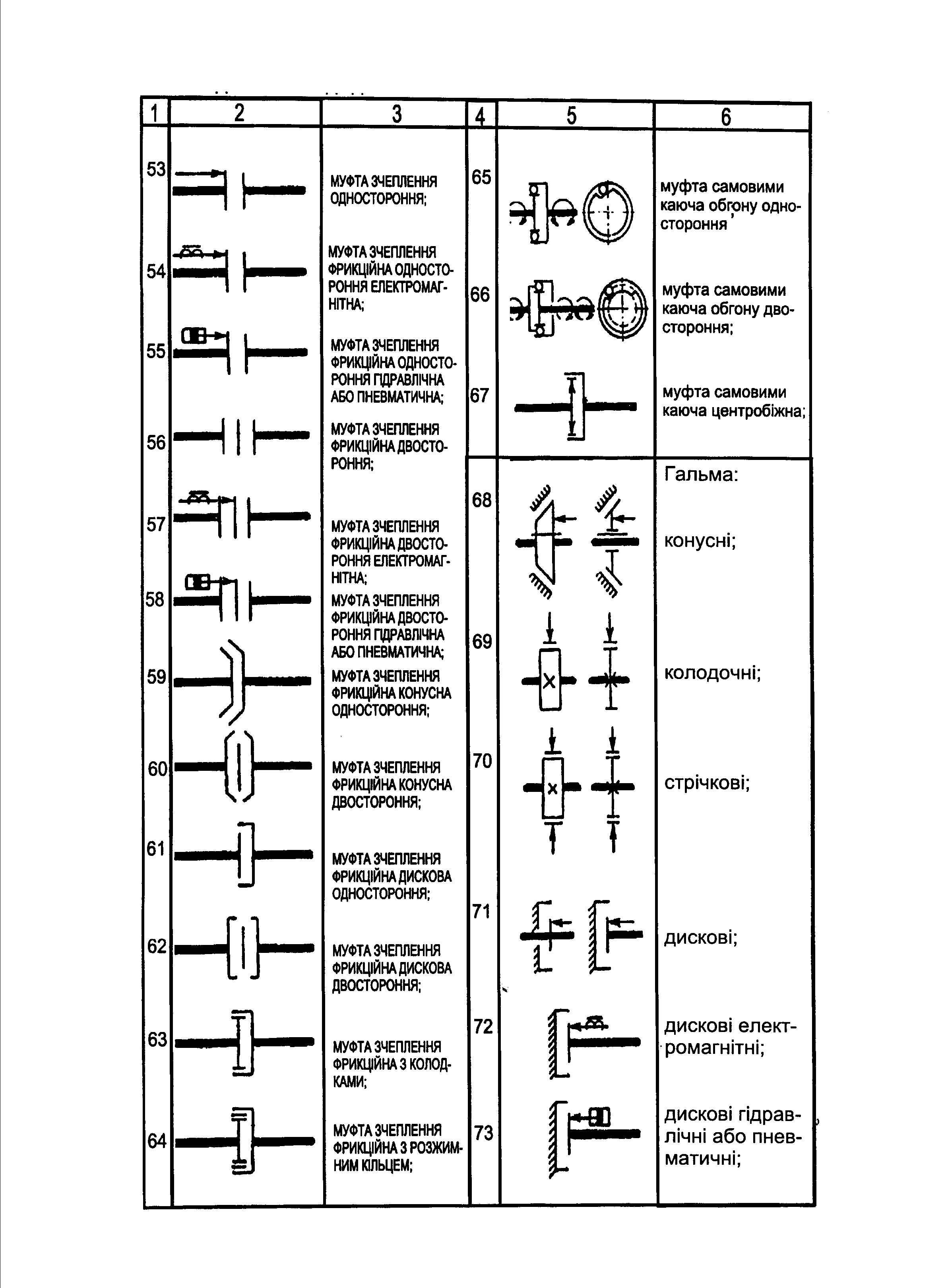
1. Умовні позначення елементів кінематичних схем
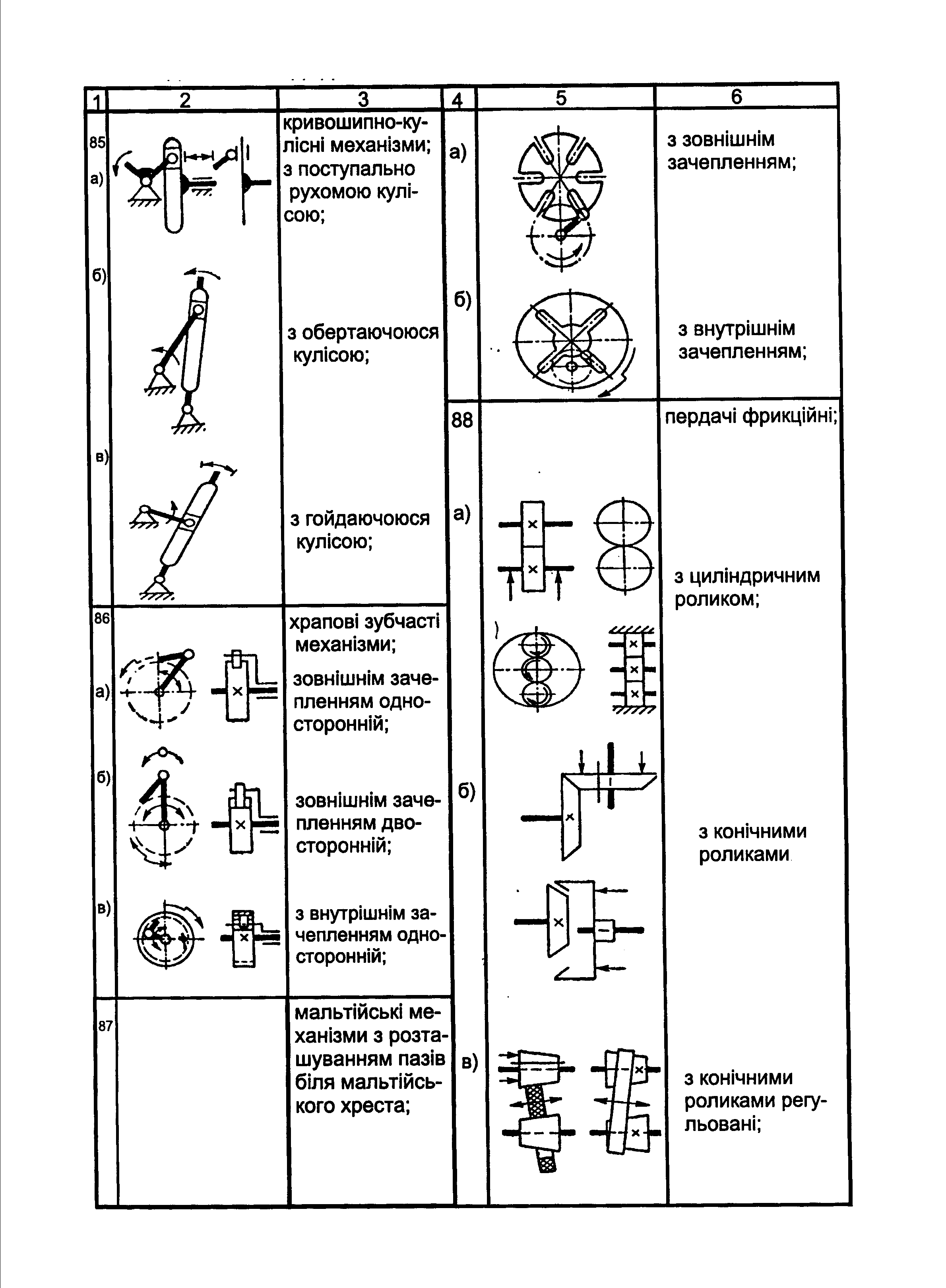
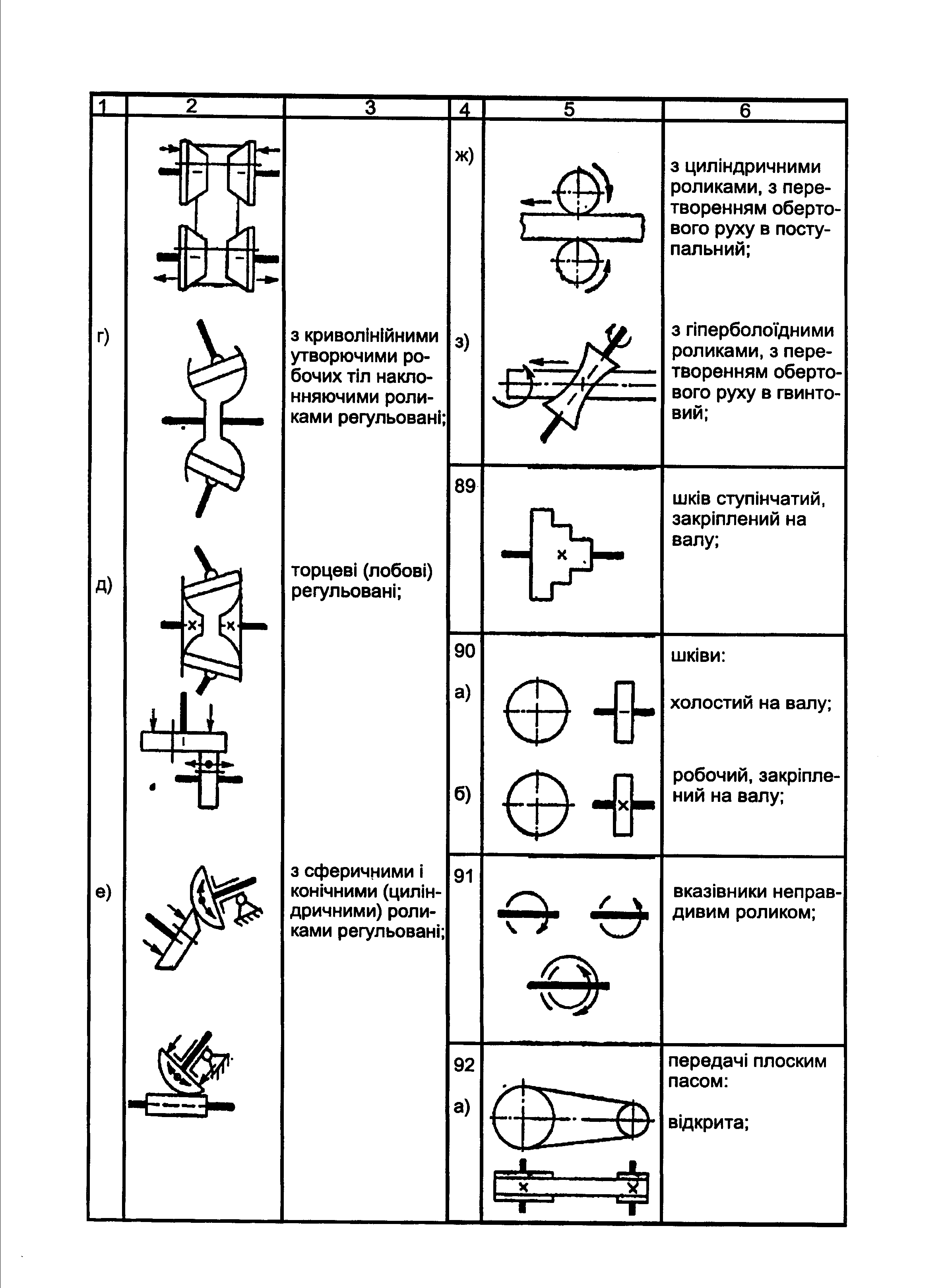
При складанні кінематичної схеми використовують умовні позначення деталей і механізмів верстатів по ГОСТ2.770–68* і СТ СЕВ 2519-80 (табл.1).
Таблиця 1 - Умовні позначення елементів кінематичних схем
2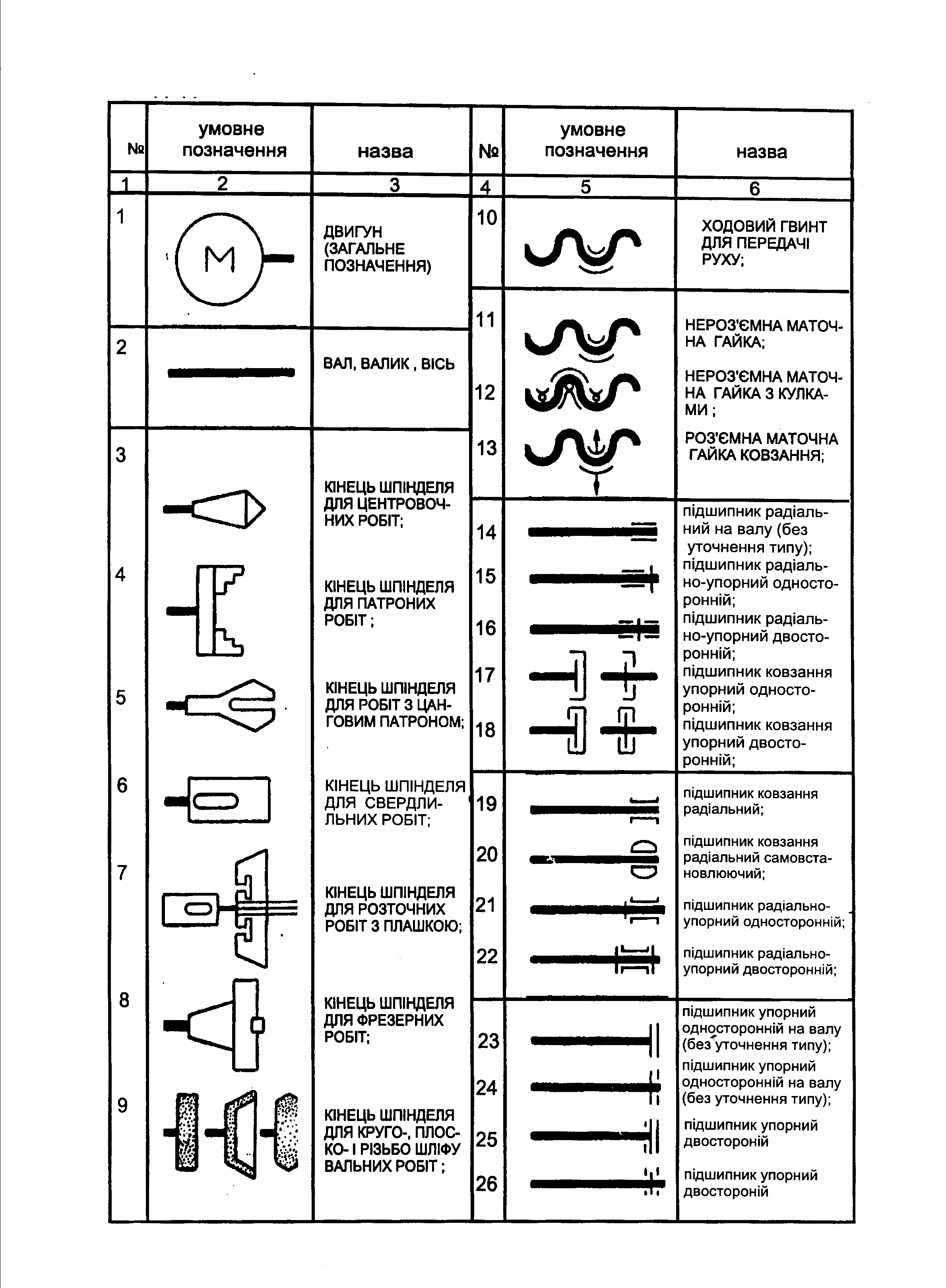
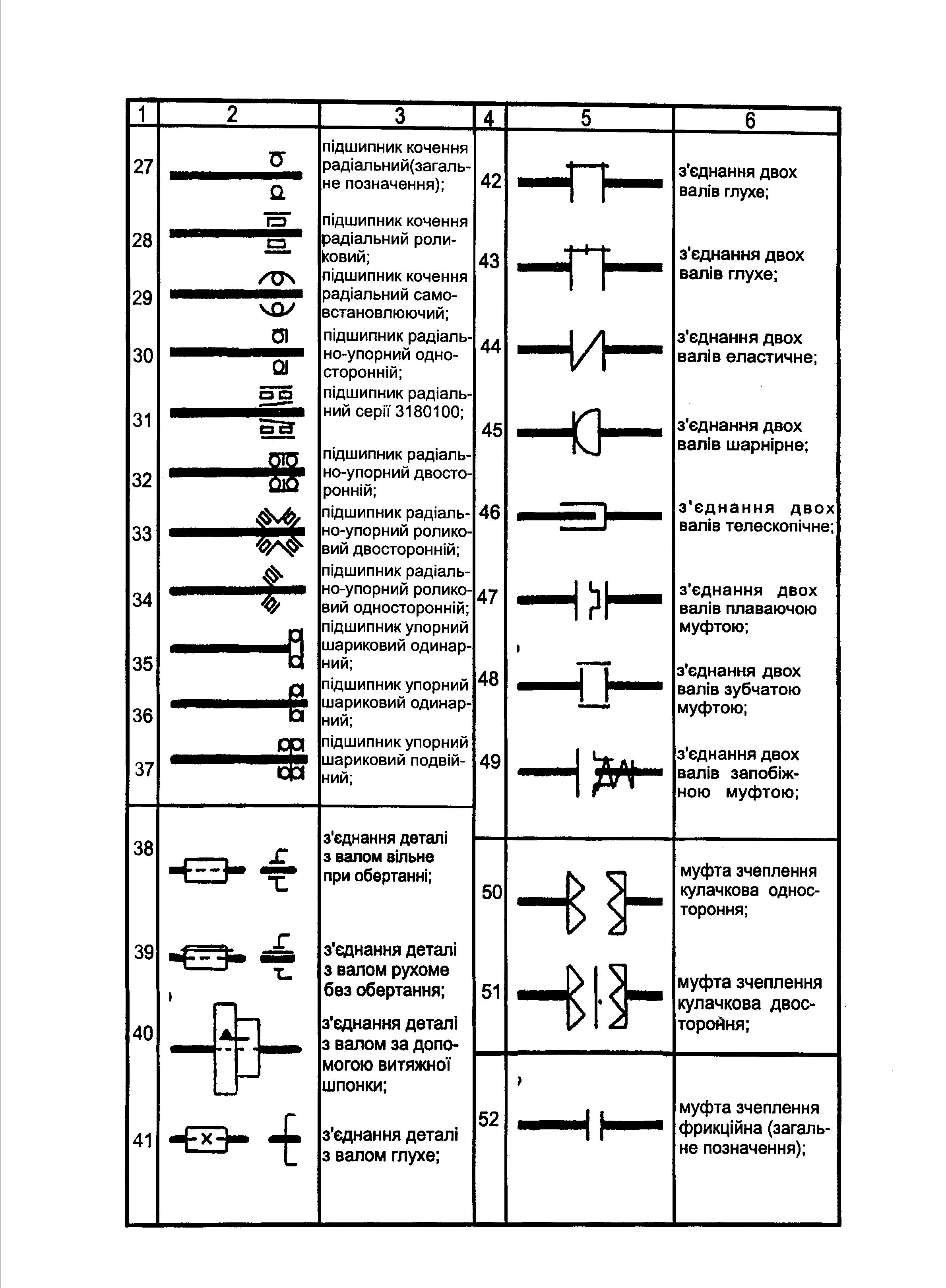 продовження
табл.1
продовження
табл.1
3
продовження табл.1
4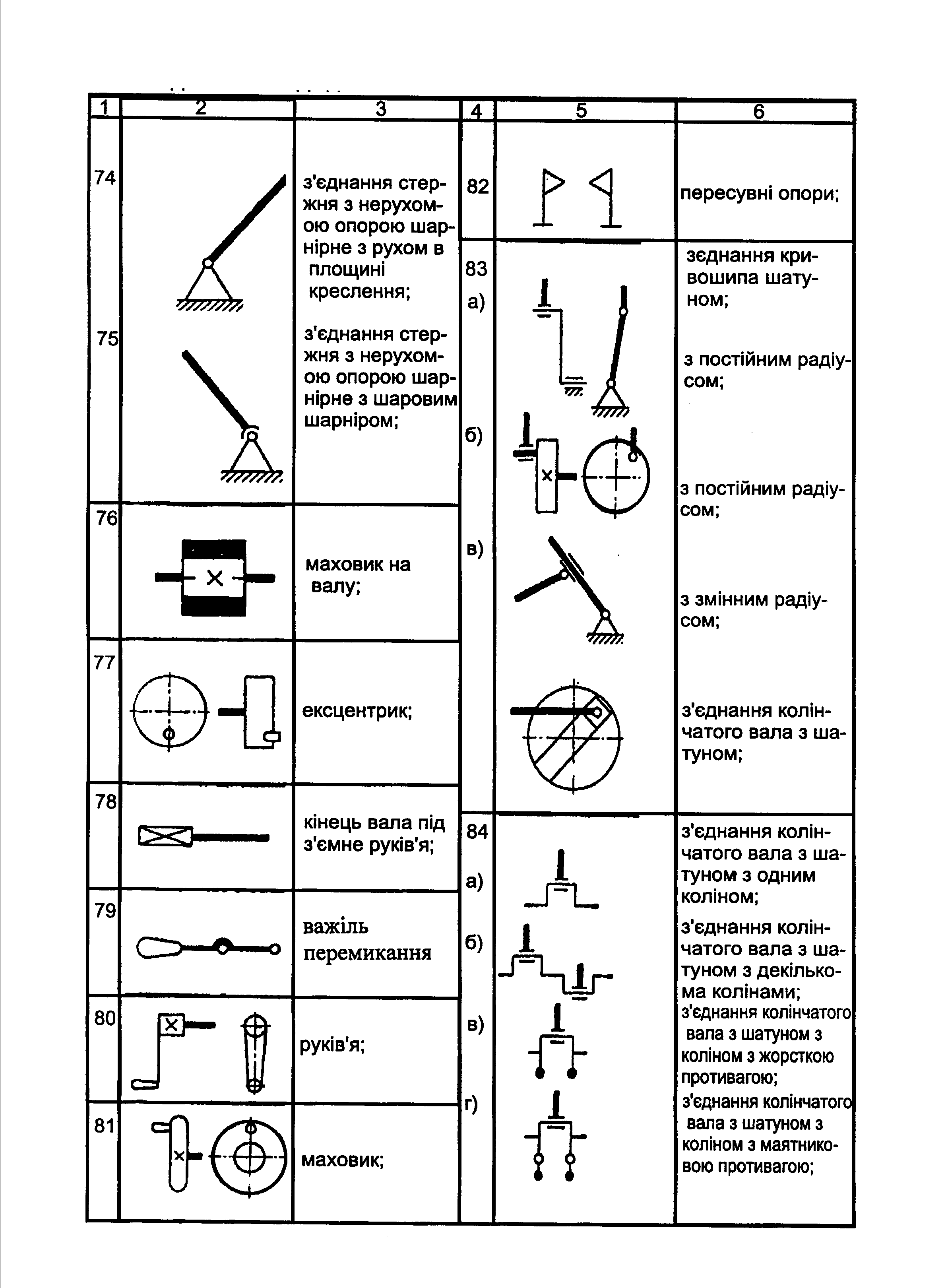
 продовження
табл.1
продовження
табл.1
5
 продовження
табл.1
продовження
табл.1
6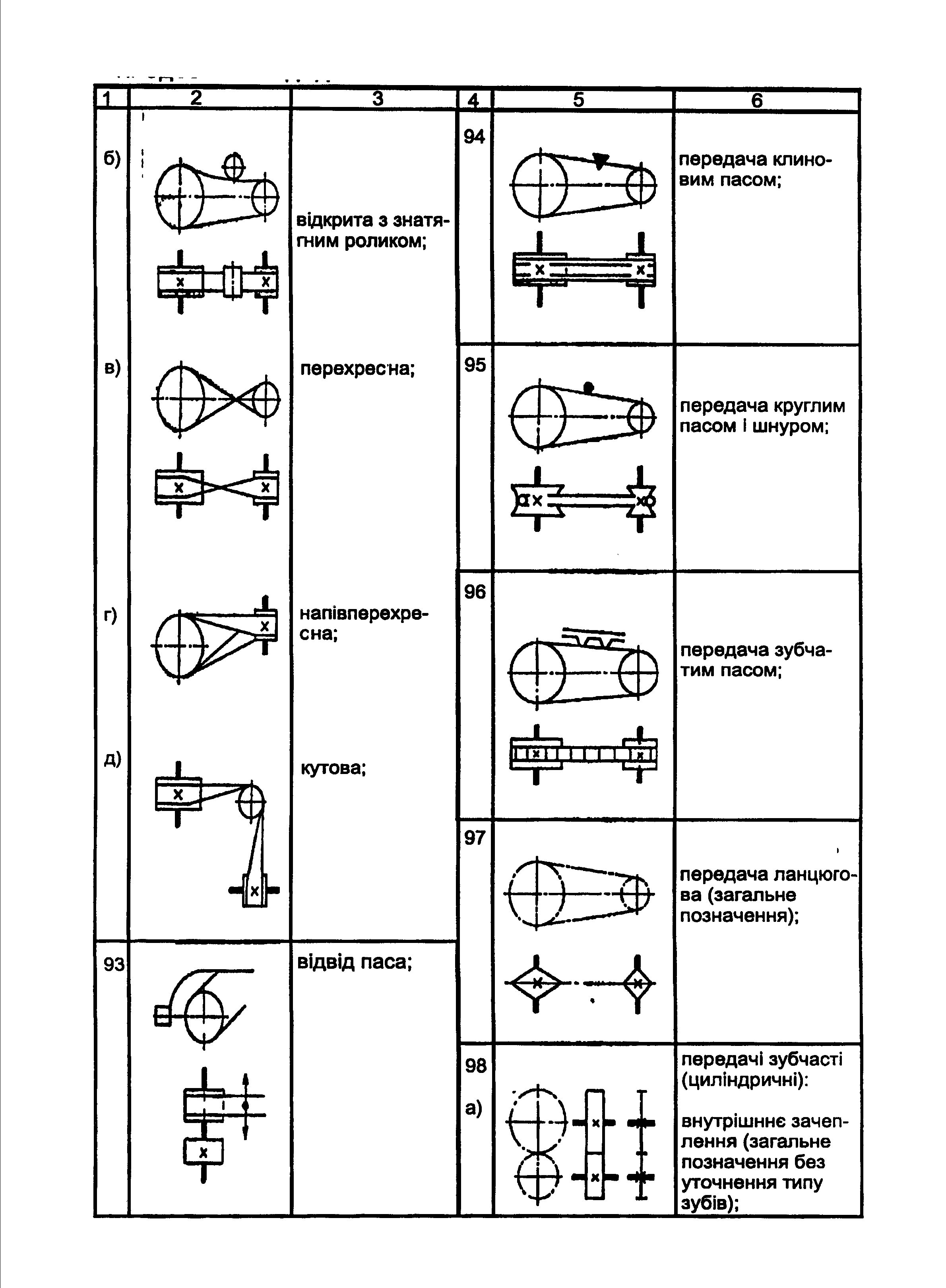
7
2. Типові приводи і механізми металорізальних верстатів
2.1. Приводи і механізми для безступінчастої зміни швидкості обертання
Для досягнення максимальної продуктивності верстата і зручності його обслуговування у верстатобудуванні знаходять застосування різного виду приводи і механізми для безступінчастої зміни швидкості (рис. 2.1). Останні бувають механічного (варіатори), електричного і гідравлічного типів.
Варіатор з розсувними конусами. Цей тип варіатора (поз. 1) виконується з різним видом зв'язку С. В якості зв'язку С застосовуються стандартні чи спеціальні клинові ремені, спеціальний ланцюг або сталеве кільце трапецієподібного січення. Плавна зміна швидкості вихідного шківа Ш в діапазоні 4 - 8 досягається шляхом одночасного розсовування однієї і зближення іншої пари конусів. При цьому змінюються діаметри робочої частини ведучих Шк1 і ведених Шк2 конусів.
Здвоєний торцевий варіатор. У приводах допоміжних рухів застосовуються одинарні чи здвоєні (поз. 2) торцеві варіатори. Рух від вала 1 через диск Д1, рухомий ролик Рк і диск Д2 передається валу ІІІ. Безступінчаста зміна швидкості обертання вала ІІІ у діапазоні 20—25 і вище досягається за рахунок переміщення ролика Рк вздовж вала ІІ.
Т
8
9
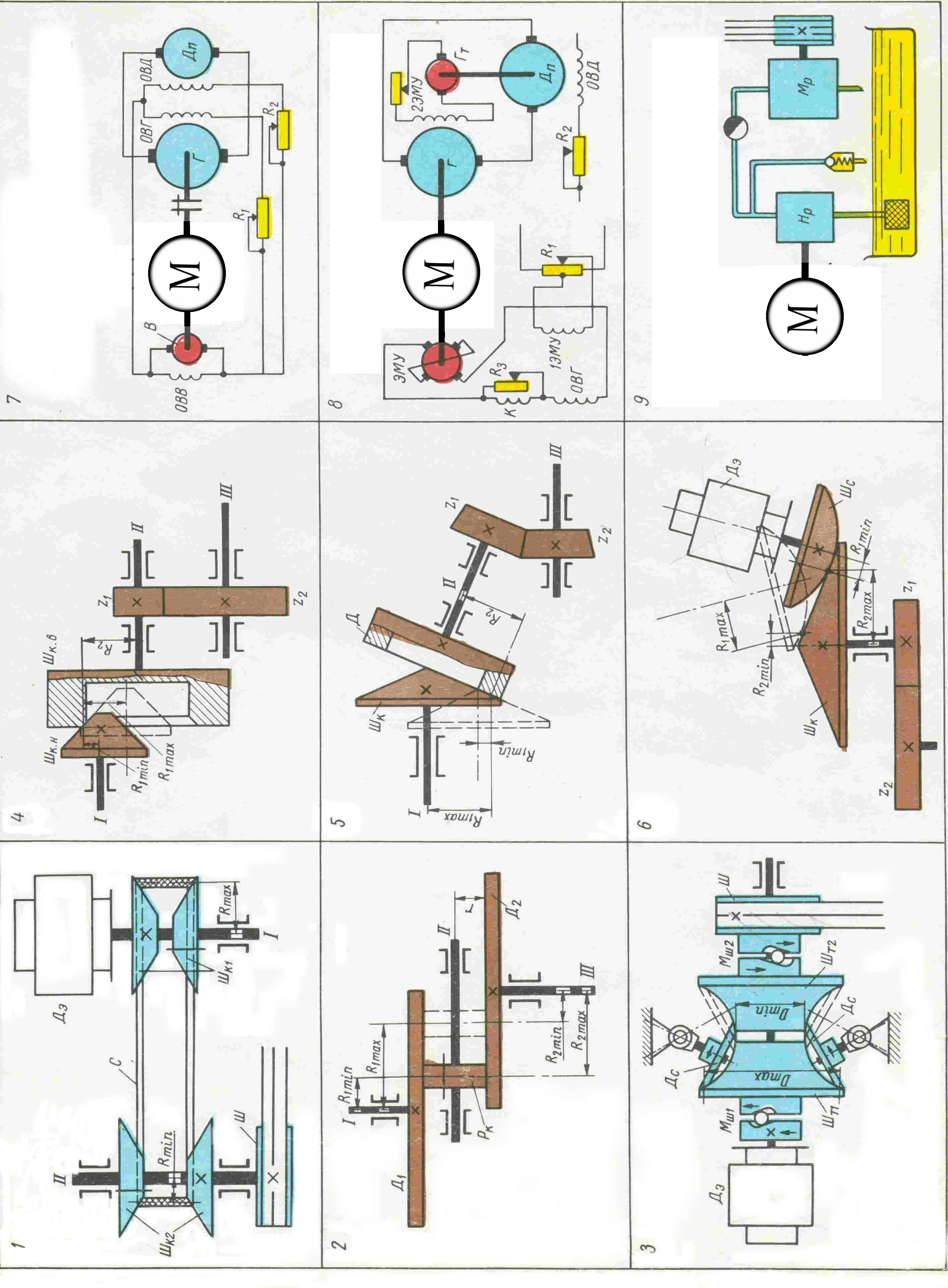
Варіатор із зовнішнім і внутрішньої конічними шківами. Рух від вала І (поз. 4) через зовнішній конічний шків Шк.з. і шків Шк.в. внутрішньою конічною поверхнею передається валу ІІ і далі через передачу z1 – z2 валу ІІІ. Вал І спільно зі шківом Шк.з. може переміщатися вздовж твірної свого конуса, завдяки чому робочий радіус шківа Шк.з. змінюється від R1max до R2max. При цьому передаточне відношення варіатора змінюється в діапазоні 3—4.
Торцеконічний варіатор. У цьому варіаторі (поз. 5) вал І з конічним шківом Шк знаходиться в постійному контакті з торцевою поверхнею диска Д, який передає обертання валу ІІ і через конічну передачу z1 – z2 веденому валу ІІІ. Для безступінчастої зміни швидкості обертання вала ІІІ передбачена можливість переміщення вала І з конічним шківом Шк вздовж його твірної, що дозволяє змінювати робочий радіус конічного шківа від R1min до R1max.
Сфероконічний варіатор. Істотною ознакою цього варіатора (поз. 6) є застосування шківа Шс зі сферичною робочою поверхнею, що має контакт із конічною поверхнею шківа Шк. При зміні кута нахилу осі електродвигуна Де, зі сферичним шківом Шс змінюються робочі радіуси як сферичного, так і конічного шківів, що забезпечує більш широкий діапазон зміни передатного відношення варіатора в межах 9—16.
Генератор-двигун. Система генератор-двигун (поз. 7) складається з асинхронного електродвигуна Да, генератора Г, збудника В і робочого електродвигуна Дп постійного струму. Збудник В представляє собою малопотужний генератор із самозбудженням, що призначений для живлення обмотки збудження ОВГ генератора Г і обмотки збудження ОВД електродвигуна Дп. Діапазон зміни швидкості дорівнює 10—16.
Е
10
Гідравлічні приводи. Асинхронний електродвигун перемінного струму Де, (поз. 9), з'єднаний з гідравлічним насосом Нр. Останній подає масло в гідравлічний двигун Мр , з'єднаний з робочими органами верстата. Безступінчаста зміна швидкості здійснюється як за рахунок зміни кількості масла що подається насосом, так і спожитого гідравлічним двигуном на кожен його оберт.