

17. Определение обратной м-цы, теорема о существовании обратной матрицы (с док-вом).
Обратная матрица — такая матрица A−1, при умножении на которую исходная матрица A даёт в результате единичную матрицу E:
![]()
Квадратная матрица обратима тогда и только тогда, когда она невырожденная, то есть её определитель не равен нулю. Для неквадратных матриц и вырожденных матриц обратных матриц не существует.

Если определитель матрицы =0, то матрица называется выраженной, обратной не существует.
ТЕОРЕМА о существовании обратной матрицы. Для того, чтобы квадратная матрица А имела обратную матрицу, необходимо и достаточно , чтобы матрица А была невыражденной (detA<>0)
18. Свойства обратных матриц
См. вопрос№17
![]() ,
где
,
где
![]() обозначает определитель.
обозначает определитель.
![]() для
любых двух обратимых матриц
и
.
для
любых двух обратимых матриц
и
.
![]() где
где
![]() обозначает
транспонированную матрицу.
обозначает
транспонированную матрицу.
![]() для
любого коэффициента
для
любого коэффициента
![]() .
.
19. Слау. Основные понятия
Система m линейных алгебраических уравнений с n неизвестными (или, линейная система, также употребляется аббревиатура СЛА́У) в линейной алгебре — это система уравнений вида
|
Система называется однородной, если все её свободные члены равны нулю (b1 = b2 = … = bm = 0), иначе — неоднородной. В общее решение неоднородной системы будет входить общее решение однородной системы и частное решение неоднородной системы
Решение системы - совокупность чисел c1, c2, …, cn, таких что подстановка каждого ci вместо xi в систему обращает все её уравнения в тождества
Решаются методом Гаусса и Крамера
20. Теорема Крамера
Метод Крамера (правило Крамера) — способ решения квадратных систем линейных алгебраических уравнений с ненулевым определителем основной матрицы.
Пример
Система линейных уравнений:
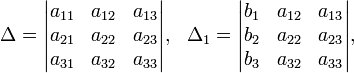
Определители:
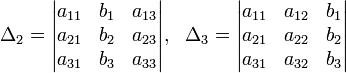
Решение:
![]()
21. Элементарное преобразование функций слау. Метод Гаусса. Решение слау.
Элементарные преобразования матрицы — это такие преобразования матрицы, в результате которых сохраняется эквивалентность матриц. Таким образом, элементарные преобразования не изменяют множество решений системы линейных алгебраических уравнений, которую представляет эта матрица.
Элементарными преобразованиями строк называют:
перестановка местами любых двух строк матрицы;
умножение любой строки матрицы на константу , ;
прибавление к любой строке матрицы другой строки.
Пример
Покажем, как методом Гаусса можно решить следующую систему:
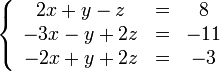
Чтобы ее решить, нужно сделать нули под главной диагональю системы
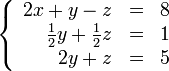
Обнулим
коэффициенты при
![]() во
второй и третьей строчках. Для этого
вычтем из них первую строчку, умноженную
на
во
второй и третьей строчках. Для этого
вычтем из них первую строчку, умноженную
на
![]() и
и
![]() ,
соответственно:
,
соответственно:
Теперь
обнулим коэффициент при
![]() в
третьей строке, вычтя из неё вторую
строку, умноженную на
в
третьей строке, вычтя из неё вторую
строку, умноженную на
![]() :
:
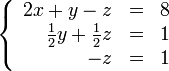
В результате мы привели исходную систему к треугольному виду, тем самым закончив первый этап алгоритма.
На втором этапе разрешим полученные уравнения в обратном порядке. Имеем:
![]() из третьего;
из третьего;
![]() из второго, подставив полученное
из второго, подставив полученное
![]()
![]() из первого, подставив полученные
и
.
из первого, подставив полученные
и
.
Таким образом исходная система решена.
СЛАУ имеет несколько решений:
Пусть
![]() —
решения однородной системы ,
—
решения однородной системы ,
![]() —
произвольные константы. Тогда
—
произвольные константы. Тогда
![]() также
является решением рассматриваемой
системы.
также
является решением рассматриваемой
системы.
- Для однородной системы
Теорема (о структуре
общего решения).
Пусть
![]() ,
тогда:
,
тогда:
если
 ,
где
—
число переменных системы, то существует
только тривиальное решение (Нулевое
решение).
,
где
—
число переменных системы, то существует
только тривиальное решение (Нулевое
решение).если
 ,
то существует
,
то существует
 линейно
независимых решений рассматриваемой
системы:
линейно
независимых решений рассматриваемой
системы:
 ,
причём её общее решение имеет вид:
,
причём её общее решение имеет вид:
 ,
где
,
где
 —
некоторые константы.
—
некоторые константы.
- Для неоднородной системы
Теорема
(об общем решении неоднородных
систем).
Пусть
![]() тогда:
тогда:
если , где — число переменных системы, то решение существует и оно единственно;
если , то общее решение системы имеет вид
 ,
где
,
где
 —
общее решение системы, называемое общим
однородным решением,
—
общее решение системы, называемое общим
однородным решением,
 —
частное решение системы, называемое
частным
неоднородным решением.
—
частное решение системы, называемое
частным
неоднородным решением.