

Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени:
Вектор
![]() направлен вдоль оси вращения по
правилу правого винта, т.е. так же, как
и вектор
направлен вдоль оси вращения по
правилу правого винта, т.е. так же, как
и вектор
![]() (рис.7). Размерность угловой скорости
lim =T–1,
а ее единица — радиан в секунду
(рад/с).
(рис.7). Размерность угловой скорости
lim =T–1,
а ее единица — радиан в секунду
(рад/с).
Линейная
скорость точки (см. рис. 6)![]()
т .
е.
.
е.![]()
В векторном виде формулу для линейной скорости можно написать как векторное произведение:
![]()
При
этом модуль векторного произведения,
по определению, равен
![]() ,
а направление совпадает с направлением
поступательного движения правого винта
при его вращении от
к R.
,
а направление совпадает с направлением
поступательного движения правого винта
при его вращении от
к R.
Угловым
ускорением называется векторная
величина, равная первой производной
угловой скорости по времени:
При
вращении тела вокруг неподвижной оси
вектор углового ускорения направлен
вдоль оси вращения в сторону вектора
элементарного приращения угловой
скорости. При ускоренном движении вектор
![]() сонаправлен вектору
(рис.8), при замедленном — противонаправлен
ему (рис.9).
сонаправлен вектору
(рис.8), при замедленном — противонаправлен
ему (рис.9).
Таким
образом, связь между линейными (длина
пути s, пройденного
точкой по дуге окружности радиуса R,
линейная скорость v,
тангенциальное ускорение
![]() ,
нормальное ускорение
,
нормальное ускорение
![]() )
и угловыми величинами (угол поворота
, угловая скорость
, угловое ускорение
) выражается
следующими формулами:
)
и угловыми величинами (угол поворота
, угловая скорость
, угловое ускорение
) выражается
следующими формулами:
![]()
В случае равнопеременного движения точки по окружности (=const)
![]()
где 0 — начальная угловая скорость.
![]()
![]()
Преобразование
кинематических величин при переходе
из неподвижной системы отсчёта в систему
отсчёта, вращающуюся с постоянной
угловой скоростью вокруг поступательно
движущейся оси
Путь
Представлен
изменением радиуса вектора, рассматриваемого
в виде суммы векторов переносного и
относительного движений
![]() Скорость
Основные
задачи кинематики сложного движения
заключаются в установлении зависимостей
между кинематическими характеристиками
абсолютного и относительного движений
точки (или тела) и характеристиками
движения подвижной системы отсчета, то
есть переносного движения. Для точки
эти зависимости являются следующими:
абсолютная скорость точки равна
геометрической сумме относительной и
переносной скоростей, то есть:
Скорость
Основные
задачи кинематики сложного движения
заключаются в установлении зависимостей
между кинематическими характеристиками
абсолютного и относительного движений
точки (или тела) и характеристиками
движения подвижной системы отсчета, то
есть переносного движения. Для точки
эти зависимости являются следующими:
абсолютная скорость точки равна
геометрической сумме относительной и
переносной скоростей, то есть:![]() или
или
![]() Ускорение
Связь
ускорений можно найти путём дифференцирования
связи для скоростей, не забывая, что
координатные векторы подвижной системы
координат также могут зависеть от
времени.
Положение материального
тела в условно неподвижной и инерциальной
системе задаётся здесь вектором
Ускорение
Связь
ускорений можно найти путём дифференцирования
связи для скоростей, не забывая, что
координатные векторы подвижной системы
координат также могут зависеть от
времени.
Положение материального
тела в условно неподвижной и инерциальной
системе задаётся здесь вектором
![]() ,
а в неинерциальной системе — вектором
,
а в неинерциальной системе — вектором
![]() . Положение начала координат второй
системы отсчета в первой системе отсчета
определяется вектором
. Положение начала координат второй
системы отсчета в первой системе отсчета
определяется вектором
![]() . Угловая скорость вращения неинерциальной
системы отсчета относительно инерциальной
задаётся вектором
. Угловая скорость вращения неинерциальной
системы отсчета относительно инерциальной
задаётся вектором
![]() . Линейная относительная скорость тела
по отношению к неинерциальной (вращающейся)
системе отсчета ( считая ее при этом
неподвижной ) задаётся вектором
. Линейная относительная скорость тела
по отношению к неинерциальной (вращающейся)
системе отсчета ( считая ее при этом
неподвижной ) задаётся вектором
![]() .
Тогда ускорение
.
Тогда ускорение
![]() в инерциальной системе отсчета будет
равно сумме:
в инерциальной системе отсчета будет
равно сумме:
![]()
Здесь
первый член — переносное поступательное
ускорение второй системы относительно
первой,
второй член — переносное
вращательное ускорение второй системы,
возникающее из-за неравномерности ее
вращения.
третий член представляет
собой вектор, противоположно направленный
осестремительной составляющей
![]() вектора
вектора
![]() , перпендикулярной
(что можно получить, рассматривая это
двойное векторное произведение - оно
равно
, перпендикулярной
(что можно получить, рассматривая это
двойное векторное произведение - оно
равно
![]() ) и потому представляет собой
осестремительное ускорение (оно совпадает
с нормальным переносным ускорением той
точки вращающейся системы , с которой
в данный момент совпадает движущаяся
точка, не путать с нормальным ускорением
движущейся точки , направленным по
нормали к ее траектории ).
сумма первых
трех членов называется переносным
ускорением .
четвертый член есть
Кориолисово
ускорение,
порождаемое взаимным влиянием переносного
вращательного движения второй системы
отсчета и относительного поступательного
движения точки относительно ее.
последний
член
) и потому представляет собой
осестремительное ускорение (оно совпадает
с нормальным переносным ускорением той
точки вращающейся системы , с которой
в данный момент совпадает движущаяся
точка, не путать с нормальным ускорением
движущейся точки , направленным по
нормали к ее траектории ).
сумма первых
трех членов называется переносным
ускорением .
четвертый член есть
Кориолисово
ускорение,
порождаемое взаимным влиянием переносного
вращательного движения второй системы
отсчета и относительного поступательного
движения точки относительно ее.
последний
член
![]() — ускорение точки относительно второй
системы отсчета ( считая ее неподвижной
).
— ускорение точки относительно второй
системы отсчета ( считая ее неподвижной
).
Причиной изменения скорости движения тела всегда является его взаимодействие с другими телами.
Первый закон Ньютона: всякая материальная точка (тело) сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит ее изменить это состояние.
Стремление тела сохранять состояние покоя или равномерного прямолинейного движения называется инертностью. Поэтому первый закон Ньютона называют также законом инерции. Механическое движение относительно, и его характер зависит от системы отсчета. Первый закон Ньютона выполняется не во всякой системе отсчета, а те системы, по отношению к которым он выполняется, называются инерциальными системами отсчета. Инерциальной системой отсчета является такая система отсчета, относительно которой материальная точка, свободная от внешних воздействий, либо покоится, либо движется равномерно и прямолинейно. Первый закон Ньютона утверждает существование инерциальных систем отсчета. Из опыта известно, что при одинаковых воздействиях различные тела неодинаково изменяют скорость своего движения, т.е., иными словами, приобретают различные ускорения. Ускорение зависит не только от величины воздействия, но и от свойств самого тела (от его массы). Галилея принцип относительности, принцип физического равноправия инерциальных систем отсчёта в классической механике, проявляющегося в том, что законы механики во всех таких системах одинаковы. Отсюда следует, что никакими механическими опытами, проводящимися в какой-либо инерциальной системе, нельзя определить, покоится ли данная система или движется равномерно и прямолинейно.
Масса тела — физическая величина, являющаяся одной из основных характеристик материи, определяющая ее инерционные (инертная масса) и гравитационные (гравитационная масса) свойства. В настоящее время можно считать доказанным, что инертная и гравитационная массы равны друг другу (с точностью, не меньшей 10–12 их значения).
Второй
закон Ньютона
— дифференциальный закон движения,
описывающий взаимосвязь между приложенной
к материальной точке силой и получающимся
от этого ускорением этой точки. Фактически,
второй закон Ньютона вводит массу как
меру проявления инертности материальной
точки в выбранной инерциальной системе
отсчёта (ИСО).
Современная
формулировка
В
инерциальной системе отсчёта ускорение,
которое получает материальная точка,
прямо пропорционально равнодействующей
всех приложенных к ней сил и обратно
пропорционально её массе.
При
подходящем выборе единиц измерения,
этот закон можно записать в виде
формулы:![]() В
случае, когда масса материальной точки
меняется со временем, второй закон
Ньютона формулируется с использованием
понятия импульс:
В
случае, когда масса материальной точки
меняется со временем, второй закон
Ньютона формулируется с использованием
понятия импульс:
![]() В
инерциальной системе отсчета скорость
изменения импульса материальной точки
равна равнодействующей всех приложенных
к ней сил.
В
инерциальной системе отсчета скорость
изменения импульса материальной точки
равна равнодействующей всех приложенных
к ней сил.
![]() Когда на тело действуют несколько
сил, с учётом принципа суперпозиции
второй закон Ньютона записывается:
Когда на тело действуют несколько
сил, с учётом принципа суперпозиции
второй закон Ньютона записывается:
![]() или
или
![]()
Третий
закон Ньютона
Этот
закон объясняет, что происходит с двумя
взаимодействующими телами. Возьмём для
примера замкнутую систему, состоящую
из двух тел. Первое тело может действовать
на второе с некоторой силой
![]() , а второе — на первое с силой
, а второе — на первое с силой
![]() . Как соотносятся силы? Третий закон
Ньютона утверждает: сила действия равна
по модулю и противоположна по направлению
силе противодействия. Подчеркнём, что
эти силы приложены к разным телам, а
потому вовсе не компенсируются.
Современная
формулировка
Материальные
точки попарно действуют друг на друга
с силами, имеющими одинаковую природу,
направленными вдоль прямой, соединяющей
эти точки, равными по модулю и
противоположными по направлению:
. Как соотносятся силы? Третий закон
Ньютона утверждает: сила действия равна
по модулю и противоположна по направлению
силе противодействия. Подчеркнём, что
эти силы приложены к разным телам, а
потому вовсе не компенсируются.
Современная
формулировка
Материальные
точки попарно действуют друг на друга
с силами, имеющими одинаковую природу,
направленными вдоль прямой, соединяющей
эти точки, равными по модулю и
противоположными по направлению:
![]() Тело,
двигающееся прямолинейно и равномерно
относительно системы отсчета К, вследствие
уравнений
Тело,
двигающееся прямолинейно и равномерно
относительно системы отсчета К, вследствие
уравнений движется также прямолинейно и равномерно
относительно системы отсчета К’. Это
обозначает, что первый закон Ньютона
справедлив во всех инерциальных системах
отсчета.
Поскольку, ускорение и масса
инвариантны относительно преобразований
Галилея, т.е. не меняются в различных
инерциальных системах отсчета. Значит,
второй
закон Ньютона инвариантен относительно
преобразований Галилея. Поскольку,
величина силы не меняется при переходе
от одной инерциальной системы отсчета
к другой, третий
закон Ньютона тоже инвариантен
относительно преобразований
Галилея.
Фундамента́льные
взаимоде́йствия
— качественно различающиеся типы
взаимодействия элементарных частиц и
составленных из них тел.
На сегодня
достоверно известно существование
четырех фундаментальных
взаимодействий:
гравитационное,электромагнитное,сильное,слабое.
При
этом электромагнитное и слабое
взаимодействия являются проявлениями
единого электрослабого взаимодействия.
Основные
законы
Принцип
относительности Галилея
Основным
принципом, на котором базируется
классическая механика является принцип
относительности, сформулированный на
основе эмпирических наблюдений Г.
Галилеем. Согласно этому принципу
существует бесконечно много систем
отсчёта, в которых свободное тело
покоится или движется с постоянной по
модулю и направлению скоростью. Эти
системы отсчёта называются инерциальными
и движутся друг относительно друга
равномерно и прямолинейно. Во всех
инерциальных системах отсчёта свойства
пространства и времени одинаковы, и все
процессы в механических системах
подчиняются одинаковым законам. Этот
принцип можно также сформулировать как
отсутствие абсолютных систем отсчёта,
то есть систем отсчёта, каким-либо
образом выделенных относительно
других.
Законы
Ньютона
Основой
классической механики являются три
закона Ньютона.
Первый
закон
устанавливает наличие свойства инертности
у материальных тел и постулирует наличие
таких систем отсчёта, в которых движение
свободного тела происходит с постоянной
скоростью (такие системы отсчёта
называются инерциальными).
Второй
закон Ньютона
вводит понятие силы как меры взаимодействия
тела и на основе эмпирических фактов
постулирует связь между величиной силы,
ускорением тела и его инертностью
(характеризуемой массой). В математической
формулировке второй закон Ньютона чаще
всего записывается в следующем виде:
движется также прямолинейно и равномерно
относительно системы отсчета К’. Это
обозначает, что первый закон Ньютона
справедлив во всех инерциальных системах
отсчета.
Поскольку, ускорение и масса
инвариантны относительно преобразований
Галилея, т.е. не меняются в различных
инерциальных системах отсчета. Значит,
второй
закон Ньютона инвариантен относительно
преобразований Галилея. Поскольку,
величина силы не меняется при переходе
от одной инерциальной системы отсчета
к другой, третий
закон Ньютона тоже инвариантен
относительно преобразований
Галилея.
Фундамента́льные
взаимоде́йствия
— качественно различающиеся типы
взаимодействия элементарных частиц и
составленных из них тел.
На сегодня
достоверно известно существование
четырех фундаментальных
взаимодействий:
гравитационное,электромагнитное,сильное,слабое.
При
этом электромагнитное и слабое
взаимодействия являются проявлениями
единого электрослабого взаимодействия.
Основные
законы
Принцип
относительности Галилея
Основным
принципом, на котором базируется
классическая механика является принцип
относительности, сформулированный на
основе эмпирических наблюдений Г.
Галилеем. Согласно этому принципу
существует бесконечно много систем
отсчёта, в которых свободное тело
покоится или движется с постоянной по
модулю и направлению скоростью. Эти
системы отсчёта называются инерциальными
и движутся друг относительно друга
равномерно и прямолинейно. Во всех
инерциальных системах отсчёта свойства
пространства и времени одинаковы, и все
процессы в механических системах
подчиняются одинаковым законам. Этот
принцип можно также сформулировать как
отсутствие абсолютных систем отсчёта,
то есть систем отсчёта, каким-либо
образом выделенных относительно
других.
Законы
Ньютона
Основой
классической механики являются три
закона Ньютона.
Первый
закон
устанавливает наличие свойства инертности
у материальных тел и постулирует наличие
таких систем отсчёта, в которых движение
свободного тела происходит с постоянной
скоростью (такие системы отсчёта
называются инерциальными).
Второй
закон Ньютона
вводит понятие силы как меры взаимодействия
тела и на основе эмпирических фактов
постулирует связь между величиной силы,
ускорением тела и его инертностью
(характеризуемой массой). В математической
формулировке второй закон Ньютона чаще
всего записывается в следующем виде:
![]() Второй закон Ньютона может быть
также записан в терминах изменения
импульса тела :
Второй закон Ньютона может быть
также записан в терминах изменения
импульса тела :![]() .
Второго
закона Ньютона недостаточно для описания
движения частицы. Дополнительно требуется
описание силы , полученное из рассмотрения
сущности физического взаимодействия,
в котором участвует тело.
Третий
закон Ньютона
уточняет некоторые свойства введёного
во втором законе понятия силы. Им
постулируется наличие для каждой силы,
действующей на первое тело со стороны
второго, равной по величине и противоположной
по направлению силы, действующей на
второе тело со стороны первого. Наличие
третьего закона Ньютона обеспечивает
выполнение закона сохранения импульса
для системы тел.
Закон
сохранения импульса
Закон
сохранения импульса является следствием
законов Ньютона для замкнутых систем,
то есть систем, на которые не действуют
внешние силы или действия внешних сил
скомпенсированы и результирующая сила
равна нулю. С более фундаментальной
точки зрения существует взаимосвязь
закона сохранения импульса и однородности
пространства, выражаемая теоремой
Нётер.
Закон
сохранения энергии
Закон
сохранения энергии является следствием
законов Ньютона для замкнутых
консервативных систем, то есть систем,
в которых действует только консервативные
силы. С более фундаментальной точки
зрения существует взаимосвязь закона
сохранения энергии и однородности
времени, выражаемая теоремой Нётер.
.
Второго
закона Ньютона недостаточно для описания
движения частицы. Дополнительно требуется
описание силы , полученное из рассмотрения
сущности физического взаимодействия,
в котором участвует тело.
Третий
закон Ньютона
уточняет некоторые свойства введёного
во втором законе понятия силы. Им
постулируется наличие для каждой силы,
действующей на первое тело со стороны
второго, равной по величине и противоположной
по направлению силы, действующей на
второе тело со стороны первого. Наличие
третьего закона Ньютона обеспечивает
выполнение закона сохранения импульса
для системы тел.
Закон
сохранения импульса
Закон
сохранения импульса является следствием
законов Ньютона для замкнутых систем,
то есть систем, на которые не действуют
внешние силы или действия внешних сил
скомпенсированы и результирующая сила
равна нулю. С более фундаментальной
точки зрения существует взаимосвязь
закона сохранения импульса и однородности
пространства, выражаемая теоремой
Нётер.
Закон
сохранения энергии
Закон
сохранения энергии является следствием
законов Ньютона для замкнутых
консервативных систем, то есть систем,
в которых действует только консервативные
силы. С более фундаментальной точки
зрения существует взаимосвязь закона
сохранения энергии и однородности
времени, выражаемая теоремой Нётер.
Р абота
силы (сил) над одной точкой
Работа
нескольких сил определяется естественным
образом как работа их равнодействующей
(их векторной суммы). Поэтому дальше
будем говорить об одной силе.
При
прямолинейном движении одной материальной
точки и постоянном значении приложенной
к ней силы работа (этой силы) равна
произведению величины проекции вектора
силы на направление движения и величины
совершённого перемещения:
абота
силы (сил) над одной точкой
Работа
нескольких сил определяется естественным
образом как работа их равнодействующей
(их векторной суммы). Поэтому дальше
будем говорить об одной силе.
При
прямолинейном движении одной материальной
точки и постоянном значении приложенной
к ней силы работа (этой силы) равна
произведению величины проекции вектора
силы на направление движения и величины
совершённого перемещения:
![]() Здесь
точкой обозначено скалярное произведение,
— вектор перемещения; подразумевается,
что действующая сила постоянна в течение
всего того времени, за которое вычисляется
работа.
Если сила не постоянна, то в
этом случае она вычисляется как
интеграл:
Здесь
точкой обозначено скалярное произведение,
— вектор перемещения; подразумевается,
что действующая сила постоянна в течение
всего того времени, за которое вычисляется
работа.
Если сила не постоянна, то в
этом случае она вычисляется как
интеграл:![]() (подразумевается
суммирование по кривой, которая является
пределом ломаной, составленной из
последовательных перемещений если
вначале считать их конечными, а потом
устремить длину каждого к нулю).
Если
существует зависимость силы от
координат[6], интеграл определяется[7]
следующим образом:
(подразумевается
суммирование по кривой, которая является
пределом ломаной, составленной из
последовательных перемещений если
вначале считать их конечными, а потом
устремить длину каждого к нулю).
Если
существует зависимость силы от
координат[6], интеграл определяется[7]
следующим образом:
Cледствие: если направление движения тела ортогонально силе, работа (этой силы) равна нулю.
Мощность в механике Если на движущееся тело действует сила, то эта сила совершает работу. Мощность в этом случае равна скалярному произведению вектора силы на вектор скорости, с которой движется тело:
![]()
![]()
Частный случай мощности при вращательном движении: В физике консервати́вные си́лы (потенциальные силы) — силы, работа которых не зависит от формы траектории (зависит только от начальной и конечной точки приложения сил). Отсюда следует определение: консервативные силы — такие силы, работа которых по любой замкнутой траектории равна 0. Если в системе действуют только консервативные силы, то механическая энергия системы сохраняется. К консервативным силам относят силы притяжения, силы упругости и силы электростатического взаимодействия; к неконсервативным соответственно - силы трения и силы сопротивления. Кинетическая энергия механической системы — это энергия механического движения этой системы.
С![]() ила
F, действуя на покоящееся тело и вызывая
его движение, совершает работу, а энергия
движущегося тела возрастает на величину
затраченной работы. Таким образом,
работа dA
силы F на пути, который тело прошло за
время возрастания скорости от 0 до v,
идет на увеличение кинетической энергии
dT тела,
т. е.
ила
F, действуя на покоящееся тело и вызывая
его движение, совершает работу, а энергия
движущегося тела возрастает на величину
затраченной работы. Таким образом,
работа dA
силы F на пути, который тело прошло за
время возрастания скорости от 0 до v,
идет на увеличение кинетической энергии
dT тела,
т. е.
![]() Используя
второй закон Ньютона
Используя
второй закон Ньютона
![]() и умножая на перемещение dr
получаем
и умножая на перемещение dr
получаем
Т![]() ак
как
ак
как
![]() то dA
= mv dv=mvdv=dT,
откуда
то dA
= mv dv=mvdv=dT,
откуда
Таким образом, тело массой т, движущееся со скоростью v, обладает кинетической энергией
![]() (12.1)
(12.1)
Из формулы (12.1) видно, что кинетическая энергия зависит только от массы и скорости тела, т. е. кинетическая энергия системы есть функция состояния ее движения. Функция, изменение которой равно работе всех сил, действующих на тело, называется кинетической энергией.
Силово́е по́ле в физике — это векторное поле в пространстве, в каждой точке которого на пробную частицу действует определённая по величине и направлению сила (вектор силы). Технически различают (как это делается и для других видов полей) стационарные поля, величина и направление которых могут зависеть исключительно от точки пространства (координат x, у, z), и нестационарные силовые поля, зависящие также от момента времени t. Также однородное силовое поле, для которого сила, действующая на пробную частицу, одинакова во всех точках пространства и неоднородное силовое поле, не обладающее таким свойством. Центральная сила — сила, линия действия которой при любом положении тела, к которому она приложена, проходит через точку, называемую центром силы. Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
Пусть взаимодействие тел осуществляется посредством силовых полей (например, поля упругих сил, поля гравитационных сил), характеризующихся тем, что работа, совершаемая действующими силами при перемещении тела из одного положения в другое, не зависит от того, по какой траектории это перемещение произошло, а зависит только от начального и конечного положений. Такие поля называются потенциальными, а силы, действующие в них, — консервативными.
Тело,
находясь в потенциальном поле сил,
обладает потенциальной энергией П.
Работа консервативных сил при элементарном
(бесконечно малом) изменении конфигурации
системы равна приращению потенциальной
энергии, взятому со знаком минус, так
как работа совершается за счет убыли
потенциальной энергии:
![]()
Работа
dA
выражается как скалярное произведение
силы F на перемещение dr
и выражение можно записать в виде![]()
Следовательно, если известна функция П(r), то из формулы можно найти силу F по модулю и направлению.
Потенциальная
энергия может быть определена исходя
из как![]()
где С — постоянная интегрирования, т. е. потенциальная энергия определяется с точностью до некоторой произвольной постоянной. Это, однако, не отражается на физических законах, так как в них входит или разность потенциальных энергий в двух положениях тела, или производная П по координатам. Поэтому потенциальную энергию тела в каком-то определенном положении считают равной нулю (выбирают нулевой уровень отсчета), а энергию тела в других положениях отсчитывают относительно нулевого уровня. Для консервативных сил
![]()
или
в векторном виде![]() где
где![]() (i, j, k
— единичные векторы координатных осей).
Вектор, определяемый выражением (12.5),
называется градиентом скаляра П.
(i, j, k
— единичные векторы координатных осей).
Вектор, определяемый выражением (12.5),
называется градиентом скаляра П.
Для него наряду с обозначением grad П применяется также обозначение П. («набла») означает символический вектор, называемый оператором Гамильтона* или набла-оператором:
![]()
Конкретный
вид функции П зависит от характера
силового поля. Например, потенциальная
энергия тела массой т, поднятого на
высоту h над поверхностью
Земли, равна![]() где высота h отсчитывается
от нулевого уровня, для которого П0=0.
Выражение (12.7) вытекает непосредственно
из того, что потенциальная энергия равна
работе силы тяжести при падении тела с
высоты h на поверхность
Земли.
где высота h отсчитывается
от нулевого уровня, для которого П0=0.
Выражение (12.7) вытекает непосредственно
из того, что потенциальная энергия равна
работе силы тяжести при падении тела с
высоты h на поверхность
Земли.
Связь между потенциальной энергией и силой поля: Fs=-dEp/ds, где потенциальная энергия Ep – функция положения частицы в поле. Следовательно, проекция Fs силы поля – вектора F– в данной точке поля на направление перемещения dr равна с обратным знаком производной потенциальной энергии Ep по данному направлению.
В физике механи́ческая эне́ргия описывает сумму потенциальной и кинетической энергии, имеющихся в компонентах механической системы. Механическая энергия — это энергия, связанная с движением объекта или его положением, способность совершать механическую работу.
Сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и силами упругости, остается неизменной.
Это утверждение выражает закон сохранения энергии в механических процессах. Он является следствием законов Ньютона. Сумму E = Ek + Ep называют полной механической энергией. Закон сохранения механической энергии выполняется только тогда, когда тела в замкнутой системе взаимодействуют между собой консервативными силами, то есть силами, для которых можно ввести понятие потенциальной энергии.
Закон об изменении механической энергии
Если система взаимодействующих тел не замкнута, то ее механическая энергия не сохраняется. Изменение механической энергии такой системы равно работе внешних сил:
![]()
где Е и Е0 – полные механические энергии системы в конечном и начальном состояниях соответственно.
Примером такой системы может служить система, в которой наряду с потенциальными силами действуют непотенциальные силы. К непотенциальным силам относятся силы трения.
И́мпульс (Количество движения) — векторная физическая величина, характеризующая меру механического движения тела. В классической механике импульс тела равен произведению массы m этого тела на его скорость v, направление импульса совпадает с направлением вектора скорости:
![]()
 .
И́мпульс
си́лы
— это векторная физическая величина,
равная произведению силы на время её
действия, мера воздействия силы на тело
за данный промежуток времени (в
поступательном движении).
За конечный
промежуток времени эта величина равна
определённому интегралу от элементарного
импульса силы, где пределами интегрирования
являются моменты начала и конца промежутка
времени действия силы. В случае
одновременного действия нескольких
сил сумма их импульсов равна импульсу
их равнодействующей за то же время.
.
И́мпульс
си́лы
— это векторная физическая величина,
равная произведению силы на время её
действия, мера воздействия силы на тело
за данный промежуток времени (в
поступательном движении).
За конечный
промежуток времени эта величина равна
определённому интегралу от элементарного
импульса силы, где пределами интегрирования
являются моменты начала и конца промежутка
времени действия силы. В случае
одновременного действия нескольких
сил сумма их импульсов равна импульсу
их равнодействующей за то же время.
Момент
импульса
![]() частицы относительно некоторого начала
отсчёта определяется векторным
произведением её радиус-вектора и
импульса:
частицы относительно некоторого начала
отсчёта определяется векторным
произведением её радиус-вектора и
импульса:
![]() где
где
![]() — радиус-вектор частицы относительно
выбранного неподвижного в данной системе
отсчёта начала отсчёта,
— радиус-вектор частицы относительно
выбранного неподвижного в данной системе
отсчёта начала отсчёта,
![]() — импульс частицы.
Для нескольких
частиц момент импульса определяется
как (векторная) сумма таких членов:
— импульс частицы.
Для нескольких
частиц момент импульса определяется
как (векторная) сумма таких членов:
г![]()
![]() де
де
![]() —
радиус-вектор и импульс каждой частицы,
входящей в систему, момент импульса
которой определяется.
—
радиус-вектор и импульс каждой частицы,
входящей в систему, момент импульса
которой определяется.
(![]() В
пределе количество частиц может быть
бесконечным, например, в случае твердого
тела с непрерывно распределенной массой
или вообще распределенной системы это
может быть записано как где
В
пределе количество частиц может быть
бесконечным, например, в случае твердого
тела с непрерывно распределенной массой
или вообще распределенной системы это
может быть записано как где
![]() — импульс бесконечно малого точечного
элемента системы).
Момент
силы—
векторная физическая величина, равная
произведению радиус-вектора, проведенного
от оси вращения к точке приложения силы,
на вектор этой силы. Характеризует
вращательное действие силы на твёрдое
тело.
— импульс бесконечно малого точечного
элемента системы).
Момент
силы—
векторная физическая величина, равная
произведению радиус-вектора, проведенного
от оси вращения к точке приложения силы,
на вектор этой силы. Характеризует
вращательное действие силы на твёрдое
тело.
![]() Момент
силы как функция от времени
Момент
силы — производная по времени от момента
импульса,
Момент
силы как функция от времени
Момент
силы — производная по времени от момента
импульса,
г![]()
![]() де
L
— момент импульса. Момент импульса
твердого тела может быть описан через
произведение момента инерции и угловой
скорости.
То есть, если I
постоянная, то
де
L
— момент импульса. Момент импульса
твердого тела может быть описан через
произведение момента инерции и угловой
скорости.
То есть, если I
постоянная, то
Cкорость изменения момента импульса системы равна векторной сумме моментов внешних сил M, действующих на части этой системы. dL/dt = M. Причиной изменения момента импульса является действующий на систему результирующий момент внешних сил. Зако́н сохране́ния моме́нта и́мпульса (закон сохранения углового момента) — векторная сумма всех моментов импульса относительно любой оси для замкнутой системы остается постоянной в случае равновесия системы. В соответствии с этим, момент импульса замкнутой системы относительно любой неподвижной точки не изменяется со временем.
В
рамках классической механики гравитационное
взаимодействие описывается законом
всемирного тяготения.
Этот закон был открыт Ньютоном в 1666 г..
Он гласит, что сила гравитационного
притяжения между двумя материальными
точками массы
![]() и
и
![]() ,
разделёнными расстоянием
,
разделёнными расстоянием
![]() , пропорциональна обеим массам и обратно
пропорциональна квадрату расстояния
между ними — то есть:
, пропорциональна обеим массам и обратно
пропорциональна квадрату расстояния
между ними — то есть:
![]() Здесь
Здесь
![]() — гравитационная постоянная, равная
— гравитационная постоянная, равная
![]() м³/(кг с²).
м³/(кг с²).
Для гравитационных сил справедлив принцип суперпозиции: сила, действующая на точечное тело со стороны нескольких других тел, равна сумме сил, действующих со стороны каждого тела. Это утверждение также является обобщением экспериментальных данных и фундаментальным свойством гравитационных взаимодействий.
Потенциальная
энергия в поле тяготения Земли
вблизи поверхности приближённо выражается
формулой:
![]() ,
где
,
где
![]() — масса тела,
— масса тела,
![]() — ускорение свободного падения,
— ускорение свободного падения,
![]() — высота положения центра масс тела
над произвольно выбранным нулевым
уровнем.
— высота положения центра масс тела
над произвольно выбранным нулевым
уровнем.
Гравитационное поле, так же как и поле силы тяжести, потенциально. Это значит, что можно ввести потенциальную энергию гравитационного притяжения пары тел, и эта энергия не изменится после перемещения тел по замкнутому контуру. Потенциальность гравитационного поля влечёт за собой закон сохранения суммы кинетической и потенциальной энергии и при изучении движения тел в гравитационном поле часто существенно упрощает решение. В рамках ньютоновской механики гравитационное взаимодействие является дальнодействующим. Это означает, что как бы массивное тело ни двигалось, в любой точке пространства гравитационный потенциал зависит только от положения тела в данный момент времени.
Неинерциа́льная систе́ма отсчёта — система отсчёта, к которой не применим закон инерции (говорящий о том, что каждое тело, в отсутствие действующих на него сил, движется по прямой и с постоянной скоростью), и поэтому для согласования сил и ускорений в которой приходится вводить фиктивные силы инерции. Всякая система отсчета, движущаяся с ускорением относительно инерциальной, является неинерциальной. Для того, чтобы найти уравнение движения в неинерциальной системе отсчёта, нужно знать законы преобразования сил и ускорений при переходе от инерциальной системы к любой неинерциальной. Классическая механика постулирует следующие два принципа: время абсолютно, то есть промежутки времени между любыми двумя событиями одинаковы во всех произвольно движущихся системах отсчёта; пространство абсолютно, то есть расстояние между двумя любыми материальными точками одинаково во всех произвольно движущихся системах отсчёта. Эти два принципа позволяют записывать уравнение движения материальной точки относительно любой неинерциальной системы отсчёта, в которой не выполняется первый закон Ньютона.
Силы инерции - в точных науках сила инерции обычно представляет собой понятие, привлекаемое в целях удобства при рассмотрении движения материальных тел в неинерциальной системе отсчёта. Частными случаями такой силы инерции являются центробежная сила и сила Кориолиса. Си́ла Кориоли́са — одна из сил инерции, существующая в неинерциальной системе отсчёта из-за вращения и законов инерции, проявляющаяся при движении в направлении под углом к оси вращения. В неинерциальных системах отсчёта второй закон Ньютона записывается следующим образом:
![]() ,
,
где
—
![]() сила инерции, связанная с математическим
преобразованием от инерциальной к
неинерциальной системы отсчета. В
равномерно вращающихся системах отсчета
действуют две силы инерции: центробежная
сила
сила инерции, связанная с математическим
преобразованием от инерциальной к
неинерциальной системы отсчета. В
равномерно вращающихся системах отсчета
действуют две силы инерции: центробежная
сила
![]() и сила Кориолиса
и сила Кориолиса
![]() . Следовательно, утверждения «Земля
вращается вокруг своей оси» и «В системе
отсчета, связанной с Землёй, действуют
центробежная сила и сила Кориолиса»
являются эквивалетными высказываниями,
выраженными разными способами. Поэтому
экспериментальные доказательства
вращения Земли сводятся к доказательству
существования в связанной с ней системе
отсчета этих двух сил инерции.
Направление силы Кориолиса на вращающейся
Земле.
Центробежная сила, действующая
на тело массы , по модулю равна
. Следовательно, утверждения «Земля
вращается вокруг своей оси» и «В системе
отсчета, связанной с Землёй, действуют
центробежная сила и сила Кориолиса»
являются эквивалетными высказываниями,
выраженными разными способами. Поэтому
экспериментальные доказательства
вращения Земли сводятся к доказательству
существования в связанной с ней системе
отсчета этих двух сил инерции.
Направление силы Кориолиса на вращающейся
Земле.
Центробежная сила, действующая
на тело массы , по модулю равна![]() Вектор
этой силы лежит в плоскости оси вращения
и направлен перпендикулярно от неё.
Величина силы Кориолиса, действующей
на частицу, движущуюся со скоростью
относительно данной вращающейся системы
отсчета, определяется выражением
Вектор
этой силы лежит в плоскости оси вращения
и направлен перпендикулярно от неё.
Величина силы Кориолиса, действующей
на частицу, движущуюся со скоростью
относительно данной вращающейся системы
отсчета, определяется выражением![]() Вектор
этой силы направлен перпендикулярно
обоим векторам и вправо от скорости
тела (определяется по правилу буравчика).
Вектор
этой силы направлен перпендикулярно
обоим векторам и вправо от скорости
тела (определяется по правилу буравчика).
Механика занимается изучением так называемых механических систем. Механическая система обладает определённым числом k степеней свободы, а её состояние описывается с помощью обобщённых координат q1, … qk и соответствующих им обобщённых импульсов p1, … pk. Задача механики состоит в изучении свойств механических систем, и, в частности, в выяснении их эволюции во времени. Являясь одним из классов физических систем, механические системы по характеру взаимодействия с окружением разделяются на изолированные (замкнутые), закрытые и открытые, по принципу изменения свойств во времени — на статические и динамические. Сте́пени свобо́ды — характеристики движения механической системы. Число степеней свободы определяет минимальное количество независимых переменных (обобщённых координат), необходимых для полного описания движения механической системы. Также число степеней свободы равно полному числу независимых уравнений, полностью описывающих динамику системы. В механике внешними силами по отношению к данной системе материальных точек (т. е. такой совокупности материальных точек, в которой движение каждой точки зависит от положений или движений всех остальных точек) называются те силы, которые представляют собою действие на эту систему других тел (других систем материальных точек), не включенных в состав данной системы. Внутренними силами являются силы взаимодействия между отдельными материальными точками данной системы. Подразделение сил на внешние и внутренние является совершенно условным: при изменении заданного состава системы некоторые силы, ранее бывшие внешними, могут стать внутренними, и обратно.
Ц ентр
масс - геометрическая точка, характеризующая
движение тела или системы частиц как
целого. Положение центра масс (центра
инерции) системы материальных точек в
классической механике определяется
следующим образом:
ентр
масс - геометрическая точка, характеризующая
движение тела или системы частиц как
целого. Положение центра масс (центра
инерции) системы материальных точек в
классической механике определяется
следующим образом:
где
— радиус-вектор центра масс,
— радиус-вектор i-й точки системы,
 —
масса i-й точки.
—
масса i-й точки.

![]()
где:
— суммарная масса системы,
— объём,
— плотность. Центр масс, таким образом, характеризует распределение массы по телу или системе частиц.
У![]() равнение
движения центра масс.
Запишем основной закон динамики
поступательного движения механической
системы, используя понятие центра масс,
получим:
равнение
движения центра масс.
Запишем основной закон динамики
поступательного движения механической
системы, используя понятие центра масс,
получим:
где Fвнеш - результирующая всех внешних сил, действующих на систему. Это и есть уравнение движения центра масс системы одно из важнейших уравнений механики.
В классической механике полным импульсом системы материальных точек называется векторная величина, равная сумме произведений масс материальных точек на их скорости:
![]() соответственно
величина
соответственно
величина
![]() называется импульсом одной материальной
точки. Это векторная величина, направленная
в ту же сторону, что и скорость частицы.
Единицей измерения импульса в Международной
системе единиц (СИ) является килограмм-метр
в секунду (кг·м/с).
называется импульсом одной материальной
точки. Это векторная величина, направленная
в ту же сторону, что и скорость частицы.
Единицей измерения импульса в Международной
системе единиц (СИ) является килограмм-метр
в секунду (кг·м/с).
Если мы имеем дело с телом конечного размера, не состоящим из дискретных материальных точек, для определения его импульса необходимо разбить тело на малые части, которые можно считать материальными точками и просуммировать по ним, в результате получим:
![]() Импульс
системы, на которую не действуют никакие
внешние силы (или они скомпенсированы),
сохраняется во времени:
Импульс
системы, на которую не действуют никакие
внешние силы (или они скомпенсированы),
сохраняется во времени:
![]() (*)
(*)
Сохранение импульса в этом случае следует из второго и третьего закона Ньютона: написав второй закон Ньютона для каждой из составляющих систему материальных точек и просуммировав по всем материальным точкам, составляющим систему, в силу третьего закона Ньютона получим равенство(*)
Зако́н сохране́ния и́мпульса (Зако́н сохране́ния количества движения) утверждает, что векторная сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная.
В классической механике закон сохранения импульса обычно выводится как следствие законов Ньютона. Из законов Ньютона можно показать, что при движении в пустом пространстве импульс сохраняется во времени, а при наличии взаимодействия скорость его изменения определяется суммой приложенных сил.
импульс системы тел могут изменить только внешние силы, причем изменение импульса системы пропорционально сумме внешних сил и совпадает с ней по направлению. Внутренние силы, изменяя импульсы отдельных тел системы, не изменяют суммарный импульс системы.
![]()
Уравнение (9) справедливо для любого интервала времени, если сумма внешних сил остается постоянной.
Систе́ма це́нтра масс (систе́ма це́нтра ине́рции) — невращающаяся система отсчёта, связанная с центром масс механической системы. Обычно сокращается как с. ц. м. или с. ц. и. Суммарный импульс системы в с.ц.м. равен нулю. Для замкнутой системы её система центра масс инерциальна, тогда как незамкнутая система в общем случае может обладать неинерциальной системой центра масс. Суммарная кинетическая энергия механической системы в с.ц.м. минимальна среди всех систем отсчёта; в любой другой невращающейся (не обязательно инерциальной) системе отсчёта кинетическая энергия равна кинетической энергии в с.ц.м. плюс кинетическая энергия движения механической системы как целого (MV²/2, где М — полная масса механической системы, V — относительная скорость движения систем отсчёта).
Уравнение Мещерского — основное уравнение в механике тел переменной массы, полученное И. В. Мещерским для материальной точки переменной массы (состава) Уравнение обычно записывается в следующем виде:
![]() ,
где:
,
где:
m — масса материальной точки переменной массы , меняющаяся за счет обмена частицами с окружающей средой;
— скорость движения материальной точки переменной массы ;
—
 внешние
силы, действующие на материальную точку
переменной массы со стороны ее внешнего
окружения (в том числе, если такое имеет
место, и со стороны среды с которой она
обменивается частицами, например,
электромагнитные силы — в случае
массообмена
магнитной средой,
сопротивление среды движению и т. п.);
внешние
силы, действующие на материальную точку
переменной массы со стороны ее внешнего
окружения (в том числе, если такое имеет
место, и со стороны среды с которой она
обменивается частицами, например,
электромагнитные силы — в случае
массообмена
магнитной средой,
сопротивление среды движению и т. п.);
![]() —
относительная
скорость присоединяющихся частиц;
—
относительная скорость отделяющихся
частиц;
—
относительная
скорость присоединяющихся частиц;
—
относительная скорость отделяющихся
частиц;
![]() —
скорости
массообмена присоединяющихся и
отделяющихся частиц;
—
скорости
массообмена присоединяющихся и
отделяющихся частиц;
Ф![]() ормула
Циолковского определяет скорость,
которую развивает летательный аппарат
под воздействием тяги ракетного
двигателя, неизменной по направлению,
при отсутствии всех других сил. Эта
скорость называется характеристической.,
ормула
Циолковского определяет скорость,
которую развивает летательный аппарат
под воздействием тяги ракетного
двигателя, неизменной по направлению,
при отсутствии всех других сил. Эта
скорость называется характеристической.,
где:
— конечная (после выработки всего топлива) скорость летательного аппарата;
— удельный импульс ракетного двигателя (отношение тяги двигателя к секундному расходу массы топлива);
— начальная масса летательного аппарата (полезная нагрузка + конструкция аппарата + топливо).
—
 конечная
масса летательного аппарата (полезная
нагрузка + конструкция);
Формула
Циолковского может быть получена путём
интегрирования дифференциального
уравнения Мещерского для материальной
точки переменной массы:
конечная
масса летательного аппарата (полезная
нагрузка + конструкция);
Формула
Циолковского может быть получена путём
интегрирования дифференциального
уравнения Мещерского для материальной
точки переменной массы:
в
котором
![]() —
масса точки;
—
масса точки;
— скорость точки;
— относительная скорость, с которой движется отделяющаяся от точки часть её массы.
Закон сохранения импульса позволяет объяснить и получить основные уравнения, описывающие реактивное движение. Главной особенностью движения ракеты является то, что это движение тела с переменной массой. Выбрасывая ежесекундно определенную часть массы в виде газов сгоревшего топлива, ракета разгоняется. Чтобы учесть переменность массы ракеты, следует воспользоваться уравнением Ньютона в форме: Δp/Δt = 0.
М онет
импульса твердого тела относительно
оси есть сумма моментов импульса
отдельных частиц:
онет
импульса твердого тела относительно
оси есть сумма моментов импульса
отдельных частиц:
Используя формулу vi = ri, получим
![]()
т. е.
![]()
Таким образом, момент импульса твердого тела относительно оси равен произведению момента инерции тела относительно той же оси на угловую скорость. Продифференцируем уравнение по времени:
![]()
т. е.
![]()
Это выражение — еще одна форма уравнения динамики вращательного движения твердого тела относительно неподвижной оси: производная момента импульса твердого тела относительно оси равна моменту сил относительно той же оси.
С-система
- это система отсчета, жестко связанная
с центром масс системы частиц и
перемещающаяся поступательно по
отношению к инерциальным системам. в
С-системе момент импульса системы частиц
не зависит от выбора точки, относительно
которой его определяют. Этот момент
будем называть собственным моментом
импульса системы и обозначать
![]() .
.
момент
импульса
![]() системы частиц складывается из ее
собственного момента импульса
и момента
системы частиц складывается из ее
собственного момента импульса
и момента
![]() , обусловленного движением системы
частиц как целого.
, обусловленного движением системы
частиц как целого.
Зако́н сохране́ния моме́нта и́мпульса (закон сохранения углового момента) — векторная сумма всех моментов импульса относительно любой оси для замкнутой системы остается постоянной в случае равновесия системы. В соответствии с этим, момент импульса замкнутой системы относительно любой неподвижной точки не изменяется со временем. Закон изменения момента импульса скорость изменения момента импульса системы равна векторной сумме моментов внешних сил M, действующих на части этой системы. dL/dt = M. Причем вектора L и M задаются относительно одной и той же точки O в выбранной СО. Уравнение представляет собой закон изменения момента импульса системы. Причиной изменения момента импульса является действующий на систему результирующий момент внешних сил. Изменение момента импульса за конечный промежуток времени можно найти, воспользовавшись выражением
 Приращение
момента импульса системы равно импульсу
результирующего момента внешних сил,
действующих на нее.
Приращение
момента импульса системы равно импульсу
результирующего момента внешних сил,
действующих на нее.
Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
Тело, находясь в потенциальном поле сил, обладает потенциальной энергией П. Работа консервативных сил при элементарном (бесконечно малом) изменении конфигурации системы равна приращению потенциальной энергии, взятому со знаком минус, так как работа совершается за счет убыли потенциальной энергии:
Работа dA выражается как скалярное произведение силы F на перемещение dr и выражение можно записать в виде
Следовательно, если известна функция П(r), то из формулы можно найти силу F по модулю и направлению.
Потенциальная энергия может быть определена исходя из (12.3) как
где С — постоянная интегрирования, т. е. потенциальная энергия определяется с точностью до некоторой произвольной постоянной. Это, однако, не отражается на физических законах, так как в них входит или разность потенциальных энергий в двух положениях тела, или производная П по координатам. Поэтому потенциальную энергию тела в каком-то определенном положении считают равной нулю (выбирают нулевой уровень отсчета), а энергию тела в других положениях отсчитывают относительно нулевого уровня.
В физике механи́ческая эне́ргия описывает сумму потенциальной и кинетической энергии, имеющихся в компонентах механической системы. Механическая энергия — это энергия, связанная с движением объекта или его положением, способность совершать механическую работу. Закон сохранения механической энергии утверждает, что если тело или система подвергается действию только консервативных сил, то полная механическая энергия этого тела или системы остаётся постоянной. В изолированной системе, где действуют только консервативные силы, полная механическая энергия сохраняется. Полная механическая энергия замкнутой системы тел, между которыми действуют только консервативные силы, остаётся постоянной.
Если система взаимодействующих тел не замкнута, то ее механическая энергия не сохраняется. Изменение механической энергии такой системы равно работе внешних сил:
.
где Е и Е0 – полные механические энергии системы в конечном и начальном состояниях соответственно.
С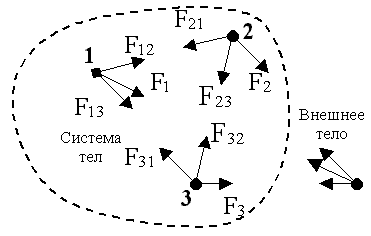 обственная
механическая энергия системы
обственная
механическая энергия системы
![]() ,
где
,
где
![]() -
собственная потенциальная энергия
системы, зависящая от относительного
расположения частиц, то есть от
конфигурации системы.
-
собственная потенциальная энергия
системы, зависящая от относительного
расположения частиц, то есть от
конфигурации системы.
![]() Итак,
приращение собственной механической
системы равно алгебраической сумме
внешних и внутренних диссипативных
сил.
В НИСО в работе внешних сил
Итак,
приращение собственной механической
системы равно алгебраической сумме
внешних и внутренних диссипативных
сил.
В НИСО в работе внешних сил
![]() учитывается работа сил инерции.
Полная
механическая энергия системы
учитывается работа сил инерции.
Полная
механическая энергия системы
![]() ,
где
,
где
![]() - потенциальная энергия системы во
внешнем поле
- потенциальная энергия системы во
внешнем поле
![]() ,
,
![]() ,
,
![]() .
.
Закон сохранения полной механической энергии системы, находящейся во внешнем стационарном поле консервативных сил: в инерциальной системе отсчета полная механическая энергия замкнутой системы частиц, в которой нет внутренних неконсервативных сил, остается постоянной в процессе движения.
Закон сохранения полной механической энергии системы Если система материальных точек находится в консервативном поле сил и силы взаимодействия между точками системы также консервативны, то полная механическая энергия такой системы остаётся постоянной (сохраняется):
E=T+Uвз+Uвнешн=const
Для системы невзаимодействующих точек E=T+Uвнешн=const Закон изменения полной механической энергии системы Если в замкнутой системе, кроме консервативных, действуют также неконсервативные силы, например силы трения, то полная механическая энергия такой системы не сохраняется, причём
E2-E1=∆E=A внутрнеконс
Если система не замкнута и на неё действуют внешние консервативные силы, то
E2-E1=∆E=A внутрнеконс +A внешннеконс
Систе́ма це́нтра масс (систе́ма це́нтра ине́рции) — невращающаяся система отсчёта, связанная с центром масс механической системы. Суммарный импульс системы в с.ц.м. равен нулю. Для замкнутой системы её система центра масс инерциальна, тогда как незамкнутая система в общем случае может обладать неинерциальной системой центра масс. Суммарная кинетическая энергия механической системы в с.ц.м. минимальна среди всех систем отсчёта; в любой другой невращающейся (не обязательно инерциальной) системе отсчёта кинетическая энергия равна кинетической энергии в с.ц.м. плюс кинетическая энергия движения механической системы как целого (MV²/2, где М — полная масса механической системы, V — относительная скорость движения систем отсчёта).
Импульс системы равен произведению массы системы на скорость ее центра масс
![]()
Движение
твёрдого
тела
можно представить как результат суммы
поступательного (любая
связанная с телом прямая перемещается
параллельно самой себе, т.е. все точки
тела движутся по одинаковым траекториям)
и вращательного (все
точки тела движутся по окружностям,
центры которых лежат на одной прямой,
называемою осью
вращения;
все окружности лежат в параллельных
плоскостях и перпендикулярно оси
вращения)
движений (неоднозначно). Произвольная
точка твёрдого тела испытывает перемещение
![]() ,
причём
,
причём ![]() для всех точек тела одно и то же. Разделив
для всех точек тела одно и то же. Разделив
![]() на
соответствующий промежуток времени
на
соответствующий промежуток времени
![]() ,
получим скорость точки:
,
получим скорость точки: ![]() .
.
![]() – одинаковая для всех точек скорость
поступательного движения,
– одинаковая для всех точек скорость
поступательного движения, ![]() – скорость, обуславливаемая вращением
(различная в разных точках).
– скорость, обуславливаемая вращением
(различная в разных точках). ![]()
![]() – радиус-вектор данной точки,
– радиус-вектор данной точки, ![]() – угловая, независящая от выбора точки
О скорость. Следовательно,
– угловая, независящая от выбора точки
О скорость. Следовательно, ![]() .
.
Любое
твёрдое тело можно представить как
совокупность материальных точек массы
![]() ,
расстояние между которыми неизменно.
Каждая материальна точка движется под
действием, как внутренних сил, так и
внешних. Движение определяется 2-ым
законом Ньютона.
,
расстояние между которыми неизменно.
Каждая материальна точка движется под
действием, как внутренних сил, так и
внешних. Движение определяется 2-ым
законом Ньютона. ![]() .
.
![]()
![]() .
.
Центр
масс твёрдого тела движется таким же
образом, как двигалась бы материальная
точка массы ![]() под действием всех внешних сил.
под действием всех внешних сил.
Движение твёрдого тела определяется 2-мя (3-мя) уравнениями:

 ;
; – при плоском движении.
– при плоском движении.
Сте́пени свобо́ды — характеристики движения механической системы. Число степеней свободы определяет минимальное количество независимых переменных (обобщённых координат), необходимых для полного описания движения механической системы. Также число степеней свободы равно полному числу независимых уравнений, полностью описывающих динамику системы.
Абсолютно твердое тело есть система частиц, расстояния между которыми неизменны. Это модель реального тела, деформациями которого можно пренебречь. Будем описывать движение частиц тела с помощью радиусов-векторов R i связанных с некоторой, достаточно произвольно выбранной, системой отсчета, и расстояний r i внутри тела, отсчитываемых от какой-то фиксированной точки O внутри тела: R i= r0+ ri
Вращение тела вокруг неподвижной оси.
Рассмотрим
произвольное тело, ось вращения которого
закреплена в неподвижных подшипниках.
Разобьём тело на элементарные массы
![]() ,
модуль
момента импульса которых
,
модуль
момента импульса которых ![]() .
Тогда момент импульса точки относительно
оси OZ
.
Тогда момент импульса точки относительно
оси OZ
![]() .
Момент импульса всего тела относительно
оси OZ
.
Момент импульса всего тела относительно
оси OZ
![]() .
Момент инерции
твёрдого тела
- сумма произведений элементарных масс
на квадрат их расстояния до произвольно
выбранной оси. Момент инерции зависит
от выбора оси и распределения массы
тела. Воспользуемся уравнением моментов
.
Момент инерции
твёрдого тела
- сумма произведений элементарных масс
на квадрат их расстояния до произвольно
выбранной оси. Момент инерции зависит
от выбора оси и распределения массы
тела. Воспользуемся уравнением моментов
![]() .
Спроецируем
это уравнение на ось OZ
и подставим в полученную формулу для
.
Спроецируем
это уравнение на ось OZ
и подставим в полученную формулу для
![]() :
:
![]() - основное
уравнение динамики вращательного
движения,
- основное
уравнение динамики вращательного
движения,
![]() – угловое
ускорение тела.
– угловое
ускорение тела. ![]() является
аналогом
и характеризует
инертность тела по отношению к вращению.
Если суммарный момент внешних сил = 0, а
в пределах тела происходит перемещение
масс, то проекция момента импульса
сохраняется
является
аналогом
и характеризует
инертность тела по отношению к вращению.
Если суммарный момент внешних сил = 0, а
в пределах тела происходит перемещение
масс, то проекция момента импульса
сохраняется ![]() .
если распределение массы несимметрично
относительно оси вращения, то момент
импульса тела будет образовывать
некоторый угол с
.
при вращении тела
.
если распределение массы несимметрично
относительно оси вращения, то момент
импульса тела будет образовывать
некоторый угол с
.
при вращении тела ![]() вращается,
образуя некоторый конус. Если распределение
масс симметрично,
вращается,
образуя некоторый конус. Если распределение
масс симметрично, ![]() ,
,![]() вместо
вместо ![]() .
.