

12Технологические объекты регулирования, их классификация и основные свойства. Виды объектов, их мат. Описание.
Аппарат, система аппаратов, машина и др. устройство, в котором одна или несколько химико-технологических величин, характеризующих его состояние, поддерживаются автоматическими регуляторами на заданном значении или изменяются по определенному закону, называется объектом химической технологии. В хим. Промышленности объектами являются реакторы, абсорберы, экстракторы, ректификационные колонны, теплообменники, насосы, компрессоры и др. аппараты технологических установок, а также участки трубопроводов.
Являясь неотъемлемой частью АСУ или АСР, каждый объект представляет собой динамическую систему со своими входными и выходными величинами. К выходным величинам объектов относят регулирующие воздействия х (потоки жидкостей, газов или сыпучих твердых веществ и тепловые потоки), которые с помощью исполнительных устройств можно изменять, а также разнообразные возмущающие воздействия z (изменение параметров исходного сырья и энергетических агентов, состояния технологической аппаратуры, атмосферных условий и т.д.).
Одним из существенных возмущений является изменение нагрузки объекта. Под нагрузкой объекта понимают количество вещества (или энергии), которые проходит через объект в единицу времени. Так, нагрузкой резервуара является расход протекающей через него жидкости, нагрузкой теплообменника – количество тепла, передаваемого в ед. времени от более нагретого вещества к более холодному. Величина нагрузки определяет размеры аппарата, а также типоразмеры первичные преобразователей и исполнительных устройств АСР.
Выходные величины объектов – регулируемые величины у - характеризует протекание химико-технологического процесса в объекте. Такими величинами могут быть температура, давление и расход жидкости, газа или пара, уровень жидкости или сыпучего материала, концентрация растворов, плотность и вязкость жидкостей, влажность газов или сыпучих материалов и др. Текущее значения регулируемых величин определяют протекание процесса в объекте в данный момент времени. Под влиянием возмущающих и регулирующих воздействий регулируемые величины изменяются во времени. Число входных величин объекта обычно превышает число выходных.
Математические модели. Процессы, протекающие в объектах, могут быть формализованы, т.е. с достаточной степенью точности описаны с помощью математических зависимостей. Совокупность математических уравнений, отражающих взаимосвязь выходных и входных величин объекта, дополненная ограничениями, накладываемыми на эти величины условиями их физической реализации и безопасной эксплуатации, представляют собой математическую модель (математическое описание) объекта.
Математическая модель должна отражать особенности объекта, существенные с точки зрения его управления, быть адекватной моделируемому объекту (достаточно отражать его свойства количественно и качественно), а также быть по возможности более простой.
Математическая формализация объекта позволяет использовать для его исследования, а также для решения задачи управления этим объектом и методы математического моделирования, которые обычно реализуют с применением средств вычислительной техники.
Поведение объекта в установившемся состоянии описывается статической моделью, а в неравновесном – динамической.
Статическая модель содержит уравнение связи между входными и выходными величинами объекта в равновесном состоянии:
y= f(x,z)
динамическая модель связывает входные и выходные величины объекта в неравновесном состояниях:
y=f(x,z,t)
а также ограничения, накладываемые на отдельные величины, например:
ymin<y<ymax; xmin<x<xmax
Классификация объектов проводится по ряду признаков. Различают одномерные и многомерные объекты.
Одномерные объекты имеют одну выходную величину и описываются одним уравнением статики и одним уравнением динамики. Примером одномерного объекта может служить резервуар для жидкости, входными величинами которого являются приход Fпр и расход Fр жидкости, а выходной величиной – уровень жидкости L.
Уравнение
статики этого объекта L=f(Fпр,
Fр)
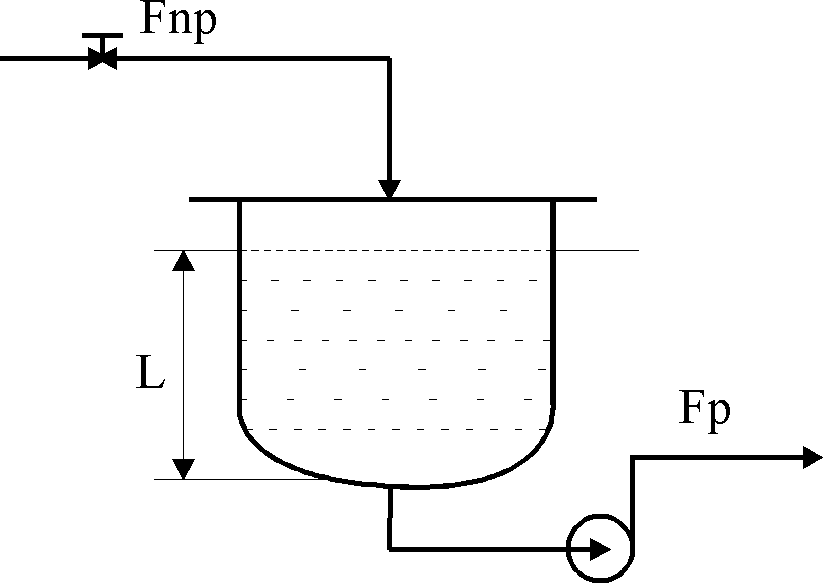
Уравнение динамики L=f(Fпр, Fр, t).
Многомерные объекты содержат по две, три и более выходных величины. Число уравнений статики и динамики должно соответствовать числу выходных величин.
Объекты могут обладать сосредоточенными и распределенными параметрами.
Объекты с сосредоточенными параметрами. К ним относятся объекты, регулируемые величины которых (температура жидкости по длине теплообменника, концентрации компонентов по высоте ректификационной колонны и др.) имеют разные числовые значения в различных точках объекта в данный момент времени. Примером объектов с распределенными параметрами могут служить: аппараты типа «труба в трубе», ректификационные колонны, экстракторы, абсорберы, десорберы, барабанные сушилки сыпучих материалов, трубчатые реакторы и др.
34Общие сведенияВ 60-е годы основное внимание было уделено созданию локальных систем, обеспечивающих автоматизацию простейших функций управления технологическими процессами: централизованный контроль, противоаварийную защиту, регулирование (стабилизацию или изменение по заданной программе) основных технологических параметров. В 60-е и последующие годы все вновь строившиеся и реконструированные химические производства с непрерывными технологическими процессами были оснащены системами автоматизации.К середине 60-х годов определились основные направления развития химической технологии, которые сохранились до начала 90-х годов: интенсификация технологических процессов, проведение их в режимах, близких к критическим, применение агрегатов большей единичной мощности.Развитие химической технологии потребовало создания гораздо более совершенных систем управления, чем локальные системы автоматизации. Эти принципиально новые системы получили название автоматизированных систем управления технологическими процессами (АСУТП).Создание АСУТП, необходимость в которых была вызвана объективными потребностями развития промышленности, стало возможно благодаря внедрению отечественных ЭВМ второго поколения (построенных на полупроводниках, в отличие от ЭВМ первого поколения, в которых использовались электронные лампы). Увеличение вычислительных ресурсов и повышение надежности ЭВМ позволило использовать их для управления технологическими процессами в «реальном времени», т.е. в едином темпе с развитием управляемого процесса.
Определения.Совокупность технологического оборудования и реализуемого на нем технологического процесса является технологическим объектом управления (ТОУ).
Человеко – машинную систему, обеспечивающую автоматизированный сбор и обработку информации, необходимой для оптимального управления в различных сферах человеческой деятельности, называют автоматизированной системой управления (АСУ).
АСУТП называют АСУ для выработки и реализации управляющих воздействий на ТОУ в соответствии с принятым критерием управления – показатели, характеризующим качество работы ТОУ и принимающим определенные значения, в зависимости от используемых управляющих воздействий.
Совокупность совместно функционирующих ТОУ и АСУТП образует автоматизированный технологический комплекс (АТК).АСУТП отличаются от локальных систем автоматизации более совершенной организацией потоков информации; практически полной автоматизацией процессов получения, обработки и представления информации; возможностью активного диалога оперативного персонала с УВМ в процессе управления для выработки наиболее эффективных решений; более высокой степенью автоматизации функций управления, включая пуск и остановку производства.От систем управления автоматическими производствами типа цехов и заводов – автоматов (являющихся высшей ступенью автоматизации) АСУТП отличается значительной степенью участия человека в процессах управления. По мере технического совершенствования технологических объектов и развития АСУТП эти различия уменьшаются.В настоящее время переход к более полной автоматизации тормозится несовершенством технологических процессов (наличием немеханизированных технологических операций, низкой надежностью технологического оборудования и т.п.), недостаточной надежностью средств автоматизации и вычислительной техники, трудностями математического описания задач, решаемым человеком в АСУТП, и др. причинами.Сформированы основные представления об АСУТП, их функциях и принципах построения; созданы документы, регламентирующие порядок их разработки, производства, внедрений и эксплуатации. Каждая АСУТП характеризуется целью управления, функциональной, технической и организационной структурами.При построении АСУТП необходимо обеспечить разумное сочетание цели ее функционирования (задаваемой критерием управления) и множества взаимосвязанных функций, достаточного для достижения главной цели.Глобальная цель управления ТОУ с помощью АСУТП состоит в поддержании экстремального значения критерия управления при выполнении всех условий, определяющих множество допустимых значений управляющих воздействий. Прямое решение такой задачи оптимального управления возможно лишь для отностительно простых ТОУ. В большинстве же случаев приходится производить декомпозицию глобальной цели управления на ряд частных целей; для достижения каждой из них требуется решение более простой задачи управления меньшей размерности.Функции АСУТПФункцией АСУТП называют действия системы, направленные на достижение одной из частных целей управления. Частные цели управления, как и реализующие их функции, находятся в определенном соподчинении, образуя функциональную структуру АСУТП. Элементами этой структуры являются отдельные функции, связи между которыми указывают порядок их выполнения. Функции АСУТП делятся на информационные, управляющие и вспомогательные.
К информационным функциям относятся те, цель которых – сбор, преобразование и хранение информации о состоянии ТОУ, представление этой информации оперативному персоналу или передача ее для последующей обработки.Основными информационными функциями являются:- первичная обработка информации о текущем значении ТОУ;- обнаружение отклонений технологических параметров и показателей состояния оборудования от установленных значений;- расчет значений неизменяемых величин и показателей (косвенные измерения, расчет ТЭП, прогнозирование и т.д.);- оперативное отображение и регистрация информации, обмен информацией с оперативным персоналом;
- обмен информацией со смежными и
вышестоящими АСУ.
обмен информацией со смежными и
вышестоящими АСУ.
Рис.1. Блок – схема автоматизированного технологического комплекса: 0 – отчет; 3 – задание; И – информация; РУ – ручное управление; ЛРУ – управление при помощи локальных регуляторов; НЦУ – непосредственное цифровое управление.
Управляющие функции обеспечивают поддержание экстремального значения критерия управления в условиях изменяющейся производственной ситуации. Они делятся на две группы:
- первые служат для определения оптимальных управляющих воздействий, при которых поддерживается оптимальный (или близкий к нему, т.е. рациональный) режим технологического процесса;
- ко второй группе относятся функции, обеспечивающие реализацию этого режима путем формирования управляющих воздействий на ТОУ.
Управляющие функции второй группы соответствуют традиционным функциям локальных систем автоматизации – регулированию (стабилизации или программному регулированию) и программно – логическому управлению технологическими процессами.
Вспомогательные функции обеспечивают решение внутрисистемных задач.